机器人的制作方法
1.本实用新型属于工业设备运输领域,尤其涉及一种机器人。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
3.其中,串联机器人,各节关节依次串联,通过相邻节的相对转动,实现各种动作。在设计工业机器人包装运输方案时,为了规避工业机器人j3-j4-j5-j6关节在包装运输途中因振动导致掉臂的问题,通常我们会在工业机器人j1-j3关节间额外增加一块钣金支架把j3-j4-j5-j6关节给支撑起来。
4.这种设计思路虽然可以有效规避,但是此钣金支架只用于工业机器人的包装运输,到达客户现场拆解后便会被遗弃,存在成本及资源上的严重浪费。
技术实现要素:
5.本实用新型提供一种机器人,以解决背景技术中提及的运输需要额外支架造成物料浪费的技术问题。
6.为实现上述目的,本实用新型的机器人的具体技术方案如下:
7.一种机器人,包括转动连接的第二关节和第三关节,第二关节上设有支撑台,第三关节上可拆卸固定连接有限位块,限位块可和支撑台抵接,使第三关节倚靠在支撑台上。
8.进一步的,第三关节设有支撑安装位和限位安装位;限位块安装在支撑安装位,使限位块可和支撑台抵接,以固定关节;限位块安装在限位安装位,使限位块可与支撑台抵接,以限制第三关节转动范围。
9.进一步的,第三关节一端设有和第二关节转动连接的转轴部。
10.进一步的,支撑安装位沿转轴部轴向设置,使限位块沿轴向固定在转轴部侧面,限位块一端可和支撑台抵接。
11.进一步的,限位安装位沿转轴部切向设置,使限位块沿切向固定在转轴部侧面,限位块端部可和支撑台抵接。
12.进一步的,第二关节上设有限位凸台,限位凸台和支撑台分别位于限位块周向两侧。
13.进一步的,支撑台和限位凸台与第二关节一体成型。
14.进一步的,机器人还包括底座,第二关节旋转连接在底座上。
15.进一步的,第三关节摆动连接在第二关节上。
16.进一步的,限位块和第三关节螺栓连接。
17.本实用新型的机器人具有以下优点:限位块可以一物两用,解决了以往在j1-j3关节间额外增加一块钣金支架所带来的成本及资源上的浪费。
附图说明
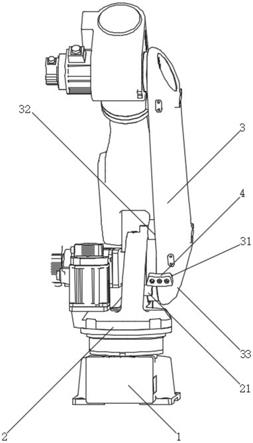
18.图1为本实用新型的运输状态机器人结构示意图;
19.图2为本实用新型的工作状态机器人结构示意图;
20.图3为本实用新型的第一关节和第二关节结构示意图。
21.图中标记说明:
22.1、第一关节;2、第二关节;21、支撑台;22、限位凸台;3、第三关节;31、支撑安装位;32、限位安装位;33、转轴部;4、限位块。
具体实施方式
23.为了更好地了解本实用新型的目的、结构及功能,下面结合附图,对本实用新型一种机器人做进一步详细的描述。
24.如图1和图2所示,本实用新型的机器人,包括串联的各个关节。
25.其中,第一关节1为底座,底座上设置有旋转关节,旋转关节作为第二关节2,转动连接在底座上,旋转关节沿轴线水平自转,从而调节机器人的方向。第二关节2末端转动连接有摆动关节,摆动关节作为第三关节3,通过竖直上下摆动,以实现俯仰角的转动。相应的,还可以安装第四、第五等等关节,后续关节可以根据具体工况设置,本申请不再赘述。
26.为了防止第三关节3以及其上的后续关节掉落,第二关节2上设有支撑台21,第三关节3上可拆卸固定连接有限位块4,限位块4可和支撑台21抵接,使第三关节3倚靠在支撑台21上。这样,将第三关节3立起,以便于收纳在窄又高的包装中,从而节省运输时包装空间。而且由于第三关节3及后续关节的重量,限位块4和支撑台21抵接产生的阻力,可以有效克服运输中的震荡,固定关节,防止关节脱落。
27.一般,限位块4采用螺栓和第三关节3连接,以便于拆卸。螺栓的数量和材质根据关节对螺栓的剪切力设置,一般设置两个即可。限位块4可以呈弧形,以配合关节的转动。
28.而且为了反复应用限位块4,第三关节3设有支撑安装位31和限位安装位32。支撑安装位31和限位安装位32均为设置在第三关节3上的平台,平台上开有螺纹孔,以螺纹连接限位块4。限位块4安装在支撑安装位31,使限位块4可和支撑台21抵接;限位块4安装在限位安装位32,使限位块4可与支撑台21抵接,以限制第三关节3转动范围。这样,通过改变限位块4的安装位置,改变限位块4和支撑台21接触状态,使支撑台21和限位块4在运输起到支撑作用,而在机器人工作时起到限位作用。
29.具体讲,第三关节3一端设有和第二关节2转动连接的转轴部33。支撑安装位31沿转轴部33轴向设置,使限位块4沿轴向固定在转轴部33侧面,且限位块4一端可和支撑台21抵接。而限位安装位32沿转轴部33切向设置,使限位块4沿切向固定在转轴部33侧面,限位块4端部可和支撑台21抵接。
30.为了保证限位作用,第二关节2上设有限位凸台22;限位凸台22和支撑台21分别位于限位块4周向两侧,以限制第三关节3的摆动范围。此外也可以另备一个限位块4,并设置两个限位安装位32,则不需设置限位凸台22,仅设置支撑台21即可完成摆动角度限位。
31.由于上述的节省运输空间,支撑台21在周向位置上位于支撑台21和限位凸台22之间,以适应窄又高的包装箱。
32.综上所述,通过调整限位块4的位置,在运输时可起到防止关节掉落的作用,在工
作时可起到限制摆动角度的作用,一块两用。
33.可以理解,本实用新型是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本实用新型的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本实用新型的精神和范围。因此,本实用新型不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本实用新型所保护的范围内。
技术特征:
1.一种机器人,包括转动连接的第二关节和第三关节,其特征在于,第二关节上设有支撑台,第三关节上可拆卸固定连接有限位块,限位块可和支撑台抵接,使第三关节倚靠在支撑台上。2.根据权利要求1所述的机器人,其特征在于,第三关节设有支撑安装位和限位安装位;限位块安装在支撑安装位,使限位块可和支撑台抵接,以固定关节;限位块安装在限位安装位,使限位块可与支撑台抵接,以限制第三关节转动范围。3.根据权利要求2所述的机器人,其特征在于,第三关节一端设有和第二关节转动连接的转轴部。4.根据权利要求3所述的机器人,其特征在于,支撑安装位沿转轴部轴向设置,使限位块沿轴向固定在转轴部侧面,限位块一端可和支撑台抵接。5.根据权利要求3所述的机器人,其特征在于,限位安装位沿转轴部切向设置,使限位块沿切向固定在转轴部侧面,限位块端部可和支撑台抵接。6.根据权利要求2所述的机器人,其特征在于,第二关节上设有限位凸台,限位凸台和支撑台分别位于限位块周向两侧。7.根据权利要求6所述的机器人,其特征在于,支撑台和限位凸台与第二关节一体成型。8.根据权利要求1所述的机器人,其特征在于,还包括底座,第二关节旋转连接在底座上。9.根据权利要求8所述的机器人,其特征在于,第三关节摆动连接在第二关节上。10.根据权利要求1所述的机器人,其特征在于,限位块和第三关节螺栓连接。
技术总结
本实用新型公开了一种机器人,包括转动连接的第二关节和第三关节,第二关节上设有支撑台,第三关节上可拆卸固定连接有限位块,限位块可和支撑台抵接,使第三关节倚靠在支撑台上。本实用新型所述的机器人,通过可拆卸的限位块,替代支撑架,节省物料。节省物料。节省物料。
技术研发人员:徐晓应 齐建伟 张天翼 高小云 张志波 马徐武
受保护的技术使用者:珠海格力智能装备有限公司
技术研发日:2021.11.30
技术公布日:2022/4/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1