一种违停监管机器人的制作方法
1.本实用新型涉及智能机器人技术领域,具体涉及一种违停监管机器人。
背景技术:
2.在现在的道路交通安全管理过程中,通常是使用监控摄像头来监测车辆的违章停靠行为,同时捕捉车辆违章的相关信息,然后再进行事后处理;有时还会通过交警巡逻来驱赶和记录违停车辆。
3.但是现有的监控系统只能进行违章的记录和拍照,不能体现违章警告的功能,不人性,不友好,且不能及时驱赶违停车辆,因此不能保障道路时时通畅;靠交警来驱赶车辆则费时费力,且不能全天候执勤。
技术实现要素:
4.本实用新型要解决的技术问题是克服现有技术的不足,提供一种违停监管机器人。
5.为解决上述技术问题,本实用新型提出的技术方案为:一种违停监管机器人,包括机身和机头,所述机头通过连接轴固定于机身顶部;所述机头内设置有摄像头,所述机身和/或机头上设置有驱赶装置,所述机身底部设置有连接机架,所述连接机架上设置有导向装置和驱动装置,连接机架通过导向装置滑动设置在道路一侧设置的轨道上。
6.上述违停监管机器人,优选的,所述导向装置包括多组限位组件,所述限位组件包括上限位轮和下限位轮,所述上限位轮和下限位轮通过轴承与连接机架连接;所述轨道上固定设置有导向条,所述导向条设置在上限位轮和下限位轮之间。
7.上述违停监管机器人,优选的,所述驱动装置包括主动齿轮和电机,所述主动齿轮通过转动轴与电机连接,所述主动齿轮与轨道上设置的齿条啮合。
8.上述违停监管机器人,优选的,所述轨道上设置有引导轨,所述连接机架上设置有滑块,所述滑块与引导轨连接,所述滑块可在引导轨上滑动。
9.上述违停监管机器人,优选的,所述机身底部还设置有激光传感器。
10.上述违停监管机器人,优选的,所述驱赶装置包括警示灯和喇叭,所述警示灯设置在机头的两侧,所述喇叭设置在机身上。
11.上述违停监管机器人,优选的,所述机身的前侧设置有显示屏。
12.上述违停监管机器人,优选的,所述机身的后侧设置有无线充电器。
13.与现有技术相比,本实用新型的优点在于:本实用新型通过驱动装置的驱动作用以及导向装置的导向作用可以带动机器人在轨道上高速运动,快速达到违停车辆旁;机头内设置的摄像头能自主对车牌进行识别,机身和/或机头上设置的驱赶装置,能够对违停人员进行违章警告,更加人性化、友好化,同时能够及时驱赶违停车辆,因此能够保持道路时时通畅。
附图说明
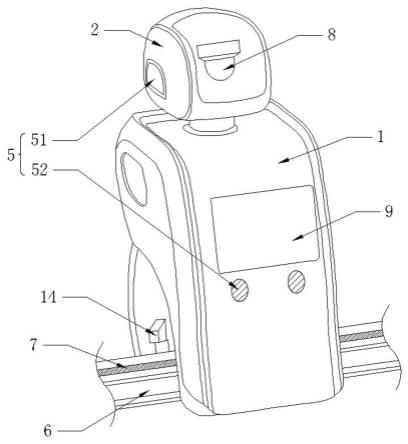
14.图1 为交通监管机器人的立体结构示意图。
15.图2 为交通监管机器人的后视图。
16.图3 为导向装置的俯视图。
17.图4 为导向装置去掉前侧板的立体结构示意图。
18.图5 为主动齿轮与齿条的啮合连接示意图。
19.图例说明
20.1、机身;2、机头;3、连接机架;4、限位组件;41、上限位轮;42、下限位轮;5、滑块;6、驱动装置;61、电机;62、主动齿轮;7、轨道;71、导向条;72、齿条;8、引导轨;9、驱赶装置;91、警示灯;92、喇叭;10、摄像头;11、显示屏;12、无线充电器;13、rfid阅读器;14、激光传感器。
具体实施方式
21.为了便于理解本实用新型,下文将结合说明书附图和较佳的实施例对本实用新型作更全面、细致地描述,但本实用新型的保护范围并不限于以下具体的实施例。
22.需要特别说明的是,当某一元件被描述为“固定于、固接于、连接于或连通于”另一元件上时,它可以是直接固定、固接、连接或连通在另一元件上,也可以是通过其他中间连接件间接固定、固接、连接或连通在另一元件上。
23.除非另有定义,下文中所使用的所有专业术语与本领域技术人员通常理解的含义相同。本文中所使用的专业术语只是为了描述具体实施例的目的,并不是旨在限制本实用新型的保护范围。
24.实施例1
25.如图1和图2所示,本实施例中的违停监管机器人,包括机身1和机头2,机头2通过连接轴固定于机身1顶部;机头2内设置有摄像头10,机身1的前侧设置有显示屏11,摄像头10能自主对车牌进行识别,显示屏11则能显示违停车辆车牌信息,提醒违停人员撤离违停地点;机器人的机身1和机头2上设置有驱赶装置9,驱赶装置9包括警示灯91和喇叭92,警示灯91设置在机头2的两侧,喇叭92设置在机身1上,警示灯91能发出红蓝闪光,喇叭92则能进行语音播报,通过视听结合的方式进行违章警告,能对违停人员起到及时有效的警告作用,且不是直接进行违章处罚,因此还具有人性化和友好化的特点;机身1底部设置有连接机架3,连接机架3上设置有导向装置和驱动装置6,连接机架3通过导向装置滑动设置在道路一侧设置的轨道7上,驱动装置6能够驱动机器人在轨道7上高速移动。机身1底部还设置有激光传感器14,激光传感器14能对机器人的行进方向进行扫描,杜绝意外碰撞;机身1的后侧设置有无线充电器12,采用无线充电方式更加安全可靠。
26.如图3和图4所示,轨道7上设置有引导轨8,连接机架3上设置有滑块5,滑块5与引导轨8连接,滑块5可在引导轨8上滑动。导向装置包括多组限位组件4,限位组件4包括上限位轮41和下限位轮42,上限位轮41和下限位轮42通过轴承与连接机架3连接;轨道7上固定设置有导向条71,导向条71设置在上限位轮41和下限位轮42之间。在连接机架3上还设置有rfid阅读器13,rfid阅读器13可与安装在道路侧方的雷达传感器组合,计算出违停车辆的停止位置;轨道7上固定设置有限位条,限位条设置在上限位轮41和下限位轮42之间。
27.如图5所示,驱动装置6包括主动齿轮62和电机61,主动齿轮62通过转动轴与电机
61连接,同时主动齿轮62与轨道7上设置的齿条72啮合。
28.本实施例中的违停监管机器人在工作时,通过电机61的转动轴转动从而可以带动主动齿轮62沿着齿条72移动,导向轮和滑块5则分别沿着导向条71和引导轨8移动,在移动过程中rfid阅读器13可与安装在道路侧方的雷达传感器组合,计算出违停车辆的停止位置,进而实现机器人的定位,因此机器人可以快速准确的移动到违停车辆位置。
29.本实施例通过rfid阅读器13与安装在道路侧方的雷达传感器组合,计算出违停车辆的停止位置,驱动装置6和导向装置配合从而可以带动机器人在轨道7上高速运动,快速达到违停车辆旁;机头2内设置的摄像头10能自主对车牌进行识别,机身1和/或机头2上设置的驱赶装置9,能够对违停人员进行违章警告,更加人性化、友好化,同时能够及时驱赶违停车辆,因此能够保持道路时时通畅。
技术特征:
1.一种违停监管机器人,包括机身和机头,所述机头通过连接轴固定于机身顶部,其特征在于:所述机头内设置有摄像头,所述机身和/或机头上设置有驱赶装置,所述机身底部设置有连接机架,所述连接机架上设置有导向装置和驱动装置,连接机架通过导向装置滑动设置在道路一侧设置的轨道上。2.根据权利要求1所述的违停监管机器人,其特征在于:所述导向装置包括多组限位组件,所述限位组件包括上限位轮和下限位轮,所述上限位轮和下限位轮通过轴承与连接机架连接;所述轨道上固定设置有导向条,所述导向条设置在上限位轮和下限位轮之间。3.根据权利要求2所述的违停监管机器人,其特征在于:所述驱动装置包括主动齿轮和电机,所述主动齿轮通过转动轴与电机连接,所述主动齿轮与轨道上设置的齿条啮合。4.根据权利要求1所述的违停监管机器人,其特征在于:所述轨道上设置有引导轨,所述连接机架上设置有滑块,所述滑块与引导轨连接,所述滑块可在引导轨上滑动。5.根据权利要求1所述的违停监管机器人,其特征在于:所述机身底部还设置有激光传感器。6.根据权利要求1所述的违停监管机器人,其特征在于:所述驱赶装置包括警示灯和喇叭,所述警示灯设置在机头的两侧,所述喇叭设置在机身上。7.根据权利要求1所述的违停监管机器人,其特征在于:所述机身的前侧设置有显示屏。8.根据权利要求1所述的违停监管机器人,其特征在于:所述机身的后侧设置有无线充电器。
技术总结
一种违停监管机器人,包括机身和机头,机头通过连接轴固定于机身顶部;机头内设置有摄像头,机身和/或机头上设置有驱赶装置,机身底部设置有连接机架,连接机架上设置有导向装置和驱动装置,连接机架通过导向装置滑动设置在道路一侧设置的轨道上。本实用新型通过驱动装置的驱动作用以及导向装置的导向作用可以带动机器人在轨道上高速运动,快速达到违停车辆旁;机头内设置的摄像头能自主对车牌进行识别,机身和/或机头上设置的驱赶装置,能够对违停人员进行违章警告,更加人性化、友好化,同时能够及时驱赶违停车辆,因此能够保持道路时时通畅。通畅。通畅。
技术研发人员:程阳选
受保护的技术使用者:长沙千泓智能科技有限公司
技术研发日:2021.12.03
技术公布日:2022/7/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1