电力系统电缆沟巡检机器人的制作方法
1.本实用新型涉及一种电力系统电缆沟巡检机器人。
背景技术:
2.电力行业电缆隧道大多是集中敷设的,其特点是距离远、地形复杂、纵横交错、潮湿、电缆种类多,且常有各种有毒气体和易燃气体,绝大多数火灾都是由于电缆接头运行时间过长而被热击穿,短路起火,导致火灾发生,电缆隧道的特殊环境使传统人工巡检效率低下,同时伴随着人身安全威胁。
3.为保证电缆隧道内电气设备的安全稳定运行,及时发现设备存在的缺陷和隐患,积累状态检修原始数据,经常需要定期或不定期对现场设备进行巡视检查,并对现有隧道内的温度、烟雾、毒气、积水等环境信息建立完善的监测系统网络,投资成本高,效益不明显。现在基本以手工检查为主,但危害大,效率低。因人工巡检次数少、间隔时间长,有关单位不能准确、及时地了解巡视过程中可能发生的情况,也不能对电力电缆线路运行历史数据进行实时收集、分析、整理,难以准确掌握设备运行情况,基本无法开展对电力电缆系统和电缆隧道网络的实时监测。
技术实现要素:
4.本实用新型的目的是提供一种电力系统电缆沟巡检机器人,能够对电力电缆系统和隧道网络进行实时监测,改变了以往落后的人工监测方式,减少了劳动强度和安全风险,显著提高了工作效率。
5.一种电力系统电缆沟巡检机器人,其特别之处在于:包括壳体,在该壳体外表面上安装有4个麦克纳姆轮,该4个麦克纳姆轮分别通过传动机构与所述壳体内的驱动电机传动连接,在该壳体的上表面固定安装有双自由度云台,在该双自由度云台上分别安装有白光摄像头、红外摄像头、tof测距模块和超声波探伤模块,该驱动电机、白光摄像头、红外摄像头、tof测距模块和超声波探伤模块分别与安装在所述壳体内的控制器连接,还包括供电电源,该供电电源分别与该控制器和所述的驱动电机连接从而供电。
6.其中供电电源采用锂电池。
7.其中控制器与无线通信模块和蓝牙模块连接。
8.其中控制器采用mcu或者单片机。
9.本实用新型针对现有技术的不足,提出了一种电力系统电缆沟巡检机器人,经过试用证明可以有效地辅助电缆隧道内电缆及附属设施的正常运行,对电力电缆系统和隧道网络进行实时监测,采用本实用新型的巡检机器人,实现了以机器人方式综合实现隧道防火、有害气体实时监测,改变了以往落后的人工监测方式,减少了劳动强度和安全风险,提高了工作效率,有效降低了成本。
附图说明
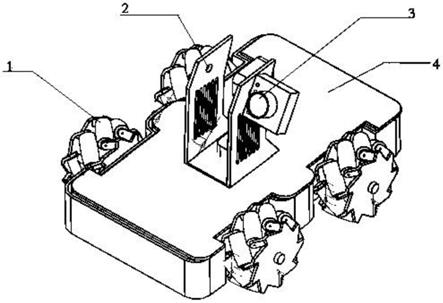
10.附图1为本实用新型的结构示意图。
具体实施方式
11.一种电力系统电缆沟巡检机器人,包括壳体4,在该壳体4外表面上安装有4个麦克纳姆轮1,该4个麦克纳姆轮1分别通过传动机构与所述壳体4内的驱动电机传动连接,在该壳体4上表面固定安装有双自由度云台2,在该双自由度云台2上分别安装有白光摄像头3、红外摄像头、tof(time offlight的缩写,直译为飞行时间)测距模块和超声波探伤模块,该驱动电机、白光摄像头3、红外摄像头、tof测距模块和超声波探伤模块分别与安装在所述壳体4内的控制器连接,还包括供电电源,该供电电源分别与该控制器和所述的驱动电机连接从而供电,其中供电电源采用锂电池,另外控制器采用微控制器mcu或者单片机。该控制器与无线通信模块和蓝牙模块连接从而实现无线遥控。
12.本实用新型采用电力系统电缆沟巡检机器人,可以与集中监控相结合来构建电缆隧道巡检系统,用其来解决周期巡视电缆隧道电缆及附属设施的运行情况,有效的解决了高压供电电缆正常运作状态不间断巡检与工作人员的周期巡检不足的矛盾,保障了巡检任务的数量、质量和可靠性,提升了供电组网及供电设施及电缆隧道工作人员安全性;周期性巡检信息的集中监控记录、交互分析功能,为电力设备及时维护和故障分析提供了更为可靠的依据。
13.与现有技术方案相比,本实用新型机器人的有益效果还包括:1、人工进入电缆隧道内巡检无效停机时间增长且检查范围有限。2、运维要求周期巡检,工作量庞大。3、并且原始方式无法很快准确确定潜在故障,精准巡检实现难。4、电缆隧道巡检工作时,往往过度依赖工人自身经验,如设备温度检测时,一些工人习惯于以体感温度大致检测其基本情况,辨别范围十分有限。5、电缆隧道巡检工作时隧道内气体环境相对复杂,不利于人员安全,危险性很大许多无色无味的气体发生泄漏时,人工巡检无法及时发现,而机器人巡检则可以通过其搭载的多参数气体探测器及时发现异常,及时反馈。6、现有设备设施安装复杂,安装过程也需要人工介入。7、现有巡检设备功能单一且采用的普通轮式轨道式设计通过性差,极易翻覆总体设计不佳,未考虑实际工况。8、现有巡检设备未经过密封及防止感应电设计考虑,本设计采用全密封整机外壳非金属不导电材质设计避免产生感应电防止巡检过程中易燃气体爆燃的事故产生。
14.本实用新型的机器人是一种应用安装麦克纳姆轮1的机器人小车平台,双自由度云台2,白光、红外热成像普查,红外测温,音视频传输,tof深度建模分析,环境气体探测模块(可探测甲烷、二氧化碳、一氧化碳、氧气、温度、湿度、压差等环境参数信息),烟雾告警等技术手段对人员不易进入空间狭小且存在一定危险性的电缆隧道巡检或探查,基于电缆隧道巡视检查的必要性及人工巡检劣势,为避免工人高危险作业,开发基于智能技术的电力系统电缆沟巡检机器人。
15.本实用新型的使用方法和工作原理是:
16.本实用新型的机器人采用蓝牙(wifi)遥控进入人员不易进入空间狭小且存在一定危险性的电缆隧道巡检或探查;通过安装麦克纳姆轮1的机器人小车的高穿越性结合白光、红外摄像普查无线视频传输进行拍照录像,可以实现对电缆隧道环境的全角度、全覆盖
式监控,并通过远程视频实时接收专家指导,打破空间和时间上的限制;通过红外测温实时监测温度异常点精确上传保留原始资料进行多方研讨,同时利用tof深度建模技术对电缆隧道进行三维建模留档分析(可规避光线漫反射造成的干扰),建立电缆隧道管理资料库,该机器人利用多参数气体探测器和烟雾传感器对电缆隧道的气体进行检测,有效地采集隧道周围的图像、声频、温度环境、烟雾气体情况等信息,并将信息实时反馈传递给管控中心为检修人员接下来的检修工作的开展提供技术和安全保障。
技术特征:
1.一种电力系统电缆沟巡检机器人,其特征在于:包括壳体(4),在该壳体(4)外表面上安装有4个麦克纳姆轮(1),该4个麦克纳姆轮(1)分别通过传动机构与所述壳体(4)内的驱动电机传动连接,在该壳体(4)的上表面固定安装有双自由度云台(2),在该双自由度云台(2)上分别安装有白光摄像头(3)、红外摄像头、tof测距模块和超声波探伤模块,该驱动电机、白光摄像头(3)、红外摄像头、tof测距模块和超声波探伤模块分别与安装在所述壳体(4)内的控制器连接,还包括供电电源,该供电电源分别与该控制器和所述的驱动电机连接从而供电。2.如权利要求1所述的电力系统电缆沟巡检机器人,其特征在于:其中供电电源采用锂电池。3.如权利要求1所述的电力系统电缆沟巡检机器人,其特征在于:其中控制器与无线通信模块和蓝牙模块连接。4.如权利要求1至3中任意一项所述的电力系统电缆沟巡检机器人,其特征在于:其中控制器采用mcu或者单片机。
技术总结
本实用新型涉及一种电力系统电缆沟巡检机器人。其特点是:包括壳体(4),在该壳体(4)外表面上安装有4个麦克纳姆轮(1),该4个麦克纳姆轮(1)分别通过传动机构与所述壳体(4)内的驱动电机传动连接,在该壳体(4)的上表面固定安装有双自由度云台(2),在该双自由度云台(2)上分别安装有白光摄像头(3)、红外摄像头、TOF测距模块和超声波探伤模块,该驱动电机、白光摄像头(3)、红外摄像头、TOF测距模块和超声波探伤模块分别与安装在所述壳体(4)内的控制器连接,还包括供电电源。采用本实用新型的巡检机器人,减少了劳动强度和安全风险,提高了工作效率,有效降低了成本。有效降低了成本。有效降低了成本。
技术研发人员:马瑞阳 王文龙 王磊 孙鼎鼎 姚学龙 田辉 贺吉星 马霄龙 马宁 包桦 杨波 刘候虎
受保护的技术使用者:内蒙古阿拉善银星风力发电有限公司
技术研发日:2021.12.07
技术公布日:2022/5/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1