一种叠料分离上料抓手的制作方法
1.本实用新型属于叠料分离设备领域,具体公开了一种叠料分离上料抓手。
背景技术:
2.现代工业中,许多生产线的材料堆叠搬运设备,由于涂抹有防锈油的原因,在抓取过程中容易堆叠粘贴在一起,上料时容易取到2件或更多的材料,造成设备故障。
技术实现要素:
3.为达到以上目的,本实用新型提供了一种自叠料分离上料抓手,包括法兰安装板、振动部和光电安装架,所述法兰安装板左侧固定设有所述振动部,其右侧设有机器人法兰,所述振动部的动力输出端活动的穿过法兰安装板并固定在气缸延长杆的上端,所述气缸延长杆的下端固定在光电安装架上,所述光电安装架上端还固定设有套管,所述法兰安装板下端固定设有导杆,所述导杆套设有伸缩弹簧,所述导杆下端可活动的套设在套管内,所述光电安装架下端设有取件部。
4.进一步的,所述振动部为振动气缸或振动电机。
5.进一步的,取件部为上料抓手或吸盘。
6.进一步的,所述光电安装架右侧固定有光电感应器,其下端设有接近感应器。
7.进一步的,所述导杆可在所述套管内滑动,所述套管内设有缓冲垫。
8.进一步的,所述气缸延长杆可延展伸缩。
9.与现有技术相比,本实用新型具有以下有益效果:
10.1、个体较小,可以适用于任何抓取设备,价格低廉,大大降低了成本。
11.2、通过取件部抓取工件后,采用振动抖落多余的粘叠工件,辅以光电感应器和接近感应器,配合机器人实现设备的自动上下料。
附图说明
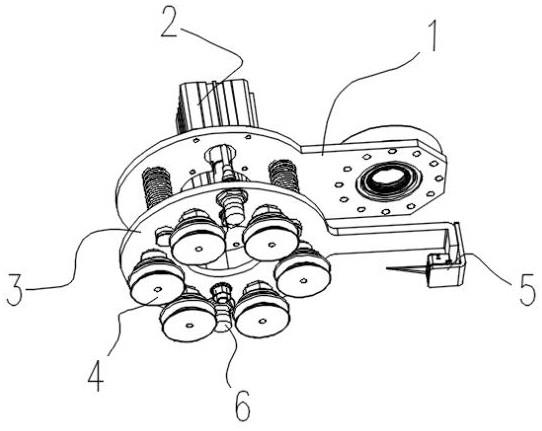
12.图1为本实用新型的整体结构示意图;
13.图2为本实用新型的爆炸图。
14.1、法兰安装板,2、振动部,3、光电安装架,4、取件部,5、光电感应器,6、接近感应器,7、导杆,8、伸缩弹簧,9、气缸延长杆,10、套管,11、缓冲垫,12、机器人法兰。
具体实施方式
15.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和具体实施方式对本实用新型进行进一步的详细描述。
16.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用其他不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开的具体实施例的限制。
17.如图1-2所示的一种叠料分离上料抓手,包括法兰安装板1、振动部2和光电安装架3,法兰安装板1左侧固定设有振动部2,其右侧设有机器人法兰12,振动部2的动力输出端活动的穿过法兰安装板1固定在气缸延长杆9的上端,该气缸延长杆9的下端固定在光电安装架3上,光电安装架3上端还固定设有套管10,法兰安装板1下端固定设有多个导杆7,导杆7套设有伸缩弹簧8,导杆7下端可活动的套设在套管10内,光电安装架3下端设有取件部4。
18.本实用新型中的振动部2为振动气缸或振动电机,振动频率为10~50次/秒,振动幅度为5~15mm,取件部4为上料抓手或吸盘,抓取负载<10kg,光电安装架3右侧固定有光电感应器5,其下端还设有接近感应器6,导杆7可在套管10内滑动,套管10内设有缓冲垫11,以缓冲导杆7向下作用力的冲击,气缸延长杆9可延展伸缩。
19.使用时,需要振动力较大时振动部2采用振动电机,需要振动力较小时振动部2采用振动气缸,抓取立体产品时取件部4为上料抓手,抓取平面产品时取件部4为吸盘,取件部4抓取工件后,当接近感应器6感应到工件到位后,通过振动部2的振动,把所抓取的粘叠多余的工件振落,并用光电感应器5检测多余工件是否已掉落。
技术特征:
1.一种叠料分离上料抓手,包括法兰安装板(1)、振动部(2)和光电安装架(3),所述法兰安装板(1)左侧固定设有所述振动部(2),其右侧设有机器人法兰(12),其特征在于:所述振动部(2)的动力输出端活动的穿过法兰安装板(1)并固定在气缸延长杆(9)的上端,所述气缸延长杆(9)的下端固定在光电安装架(3)上,所述光电安装架(3)上端还固定设有套管(10),所述法兰安装板(1)下端固定设有导杆(7),所述导杆(7)套设有伸缩弹簧(8),所述导杆(7)下端可活动的套设在套管(10)内,所述光电安装架(3)下端设有取件部(4)。2.根据权利要求1所述的叠料分离上料抓手,其特征在于:所述振动部(2)为振动气缸或振动电机。3.根据权利要求1所述的叠料分离上料抓手,其特征在于:取件部(4)为上料抓手或吸盘。4.根据权利要求1所述的叠料分离上料抓手,其特征在于:所述光电安装架(3)右侧固定有光电感应器(5),其下端设有接近感应器(6)。5.根据权利要求4所述的叠料分离上料抓手,其特征在于:所述导杆(7)可在所述套管(10)内滑动,所述套管(10)内设有缓冲垫(11)。6.根据权利要求1所述的叠料分离上料抓手,其特征在于:所述气缸延长杆(9)可延展伸缩。
技术总结
本实用新型属于叠料分离上料设备领域,具体公开了一种叠料分离上料抓手,包括法兰安装板、振动部和光电安装架,法兰安装板左侧固定设有所述振动部,其右侧设有机器人法兰,振动部的动力输出端活动的穿过法兰安装板并固定在气缸延长杆的上端,气缸延长杆的下端固定在光电安装架上,光电安装架上端还固定设有套管,法兰安装板下端固定设有导杆。本实用新型通过取件部抓取工件后,采用振动抖落多余的粘叠工件,辅以光电感应器和接近感应器,配合机器人实现设备的自动上下料,成本低、效率高,具有较大的实用价值。有较大的实用价值。有较大的实用价值。
技术研发人员:安东社 杨柳波
受保护的技术使用者:欧瑞特(广州)汽车设备有限公司
技术研发日:2021.12.08
技术公布日:2022/4/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1