一种球形物体夹取装置的制作方法
1.本实用新型属于机器人夹爪领域,具体地说是一种球形物体夹取装置。
背景技术:
2.在对球形物体表面抓取时,常用的方案是采用三爪气动手指。气动手指的夹紧力和夹紧行程较小,当需要抓取尺寸差异较大及重量较重的球形工件时,气动手指往往无法满足夹取要求。
技术实现要素:
3.针对现有三爪气动手指抓取球形物体表面存在的上述问题,本实用新型的目的在于提供一种球形物体夹取装置。该球形物体夹取装置满足了对球形物体进行中心定位夹取的要求,实现了对重量较大及体积差异大的球形物体进行可靠夹取。
4.本实用新型的目的是通过以下技术方案来实现的:
5.本实用新型包括夹爪固定板、动力源、连接盘、导向杆、导向盘、连接板b及夹爪,其中导向盘位于夹爪固定板的下方,并与所述夹爪固定板相连,所述动力源固定在夹爪固定板与导向盘之间,输出端连接有位于所述导向盘上方的连接盘,所述连接盘上沿圆周方向均匀设有多个导向杆,每个所述导向杆的上端均与连接盘连接,下端由所述导向盘穿过、并与所述导向盘相对滑动;所述导向盘的下方沿圆周方向均匀铰接有与导向杆数量相同、一一对应的夹爪,每个所述夹爪与对应的导向杆之间均设有连接板b,所述连接板b的上端与导向杆铰接,下端与所述夹爪的上端铰接,所述夹爪的下端为夹取端。
6.其中:所述导向盘与夹爪固定板之间通过连接板a相连,所述动力源固接于连接板a的内侧面或夹爪固定板的下表面。
7.所述导向盘上沿圆周方向均匀安装有与导向杆数量相同、一一对应的导向杆轴套,每根所述导向杆均由对应的导向杆轴套穿过,并与所述轴套沿轴向相对滑动。
8.所述导向盘的下表面沿圆周方向均匀设有与夹爪数量相同、一一对应的u形部,每个所述u形部的开口端内均通过连接销轴铰接一个夹爪。
9.所述连接盘为圆形盘,各所述导向杆的上端沿圆周方向分别连接于连接盘的边缘。
10.所述夹爪固定板、连接盘及导向盘相互平行。
11.所述动力源为驱动气缸,所述驱动气缸的活塞杆与所述连接盘的中间位置相连。
12.本实用新型的优点与积极效果为:
13.1.本实用新型通过一个动力源实现多个夹爪的同时打开或闭合,夹爪开合的行程较大,可对重量较大及体积差异大的球形物体进行可靠夹取。
14.2.本实用新型采用连杆机构,结构简单可靠、故障率低。
附图说明
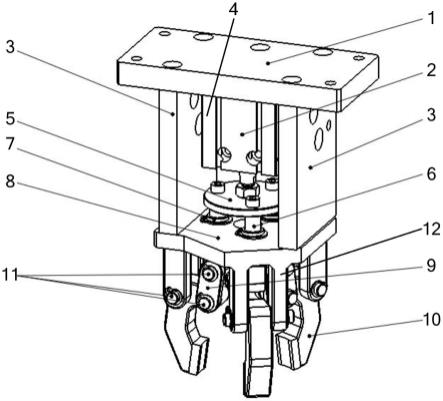
15.图1为本实用新型的立体结构示意图;
16.图2为本实用新型的结构主视图;
17.其中:1为夹爪固定板,2为驱动气缸,3为连接板a,4为气缸固定板,5为连接盘,6为导向杆,7为导向杆轴套,8为导向盘,9为连接板b,10为夹爪,11为销轴,12为u形部。
具体实施方式
18.下面结合附图对本实用新型作进一步详述。
19.如图1、图2所示,本实用新型包括夹爪固定板1、动力源、连接盘5、导向杆6、导向盘8、连接板b9及夹爪10,其中导向盘8位于夹爪固定板1的下方,并与夹爪固定板1相连,动力源固定在夹爪固定板1与导向盘8之间,输出端连接有位于导向盘8上方的连接盘5,连接盘5上沿圆周方向均匀设有多个导向杆6,每个导向杆6的上端均与连接盘5连接,下端由导向盘8穿过、并与导向盘8相对滑动;导向盘8的下方沿圆周方向均匀铰接有与导向杆6数量相同、一一对应的夹爪10,每个夹爪10与对应的导向杆6之间均设有连接板b9,连接板b9的上端通过连接销轴11与导向杆6铰接,下端通过连接销轴11与夹爪10的上端铰接,夹爪10的下端为夹取端。
20.本实施例的导向盘8与夹爪固定板1之间通过连接板a3相连,动力源固接于连接板a3的内侧面或夹爪固定板1的下表面。本实施例的夹爪固定板1、连接盘5及导向盘8相互平行,连接板a垂直于夹爪固定板1及导向盘8。
21.本实施例的动力源为驱动气缸2,驱动气缸2用螺钉固定在气缸固定板4上,气缸固定板4用螺钉与连接板a3的内侧面固接,驱动气缸2的活塞杆与连接盘5的中间位置相连。
22.本实施例的连接盘5为圆形盘,各导向杆6的上端沿圆周方向分别连接于连接盘5的边缘。
23.本实施例的导向盘8上沿圆周方向均匀安装有与导向杆6数量相同、一一对应的导向杆轴套7,每根导向杆6均由对应的导向杆轴套7穿过,并与轴套7沿轴向相对滑动。
24.本实施例的导向盘8的下表面沿圆周方向均匀设有与夹爪10数量相同、一一对应的u形部12,每个u形部12的开口端内均通过连接销轴11铰接一个夹爪10。
25.本实施例的导向杆6为三根,对应地,导向杆轴套7及夹爪10均为三个。
26.本实用新型的工作原理为:
27.本实用新型的夹爪10有两个状态:
28.打开状态,也就是夹爪10张开准备夹取物体的状态。此时驱动气缸2的活塞杆伸出,带动连接盘5向下移动,固定在连接盘5上的各导向杆6同时向下滑动,通过带动连接板b9使夹爪10张开。
29.夹紧状态,也就是夹爪10夹取物体的状态。此时驱动气缸2的活塞杆缩回,带动连接盘5向上移动,固定在连接盘5上的各导向杆6同时向上滑动,通过带动连接板b9使夹爪10夹紧。
技术特征:
1.一种球形物体夹取装置,其特征在于:包括夹爪固定板(1)、动力源、连接盘(5)、导向杆(6)、导向盘(8)、连接板b(9)及夹爪(10),其中导向盘(8)位于夹爪固定板(1)的下方,并与所述夹爪固定板(1)相连,所述动力源固定在夹爪固定板(1)与导向盘(8)之间,输出端连接有位于所述导向盘(8)上方的连接盘(5),所述连接盘(5)上沿圆周方向均匀设有多个导向杆(6),每个所述导向杆(6)的上端均与连接盘(5)连接,下端由所述导向盘(8)穿过、并与所述导向盘(8)相对滑动;所述导向盘(8)的下方沿圆周方向均匀铰接有与导向杆(6)数量相同、一一对应的夹爪(10),每个所述夹爪(10)与对应的导向杆(6)之间均设有连接板b(9),所述连接板b(9)的上端与导向杆(6)铰接,下端与所述夹爪(10)的上端铰接,所述夹爪(10)的下端为夹取端。2.根据权利要求1所述的球形物体夹取装置,其特征在于:所述导向盘(8)与夹爪固定板(1)之间通过连接板a(3)相连,所述动力源固接于连接板a(3)的内侧面或夹爪固定板(1)的下表面。3.根据权利要求1所述的球形物体夹取装置,其特征在于:所述导向盘(8)上沿圆周方向均匀安装有与导向杆(6)数量相同、一一对应的导向杆轴套(7),每根所述导向杆(6)均由对应的导向杆轴套(7)穿过,并与所述轴套(7)沿轴向相对滑动。4.根据权利要求1所述的球形物体夹取装置,其特征在于:所述导向盘(8)的下表面沿圆周方向均匀设有与夹爪(10)数量相同、一一对应的u形部(12),每个所述u形部(12)的开口端内均通过连接销轴(11)铰接一个夹爪(10)。5.根据权利要求1所述的球形物体夹取装置,其特征在于:所述连接盘(5)为圆形盘,各所述导向杆(6)的上端沿圆周方向分别连接于连接盘(5)的边缘。6.根据权利要求1所述的球形物体夹取装置,其特征在于:所述夹爪固定板(1)、连接盘(5)及导向盘(8)相互平行。7.根据权利要求1所述的球形物体夹取装置,其特征在于:所述动力源为驱动气缸(2),所述驱动气缸(2)的活塞杆与所述连接盘(5)的中间位置相连。
技术总结
本实用新型属于机器人夹爪领域,具体地说是一种球形物体夹取装置,导向盘位于夹爪固定板的下方,并与夹爪固定板相连,动力源固定在夹爪固定板与导向盘之间,输出端连接有位于导向盘上方的连接盘,连接盘上沿圆周方向均匀设有多个导向杆,每个导向杆的上端均与连接盘连接,下端由导向盘穿过、并与导向盘相对滑动;导向盘的下方沿圆周方向均匀铰接有与导向杆数量相同、一一对应的夹爪,每个夹爪与对应的导向杆之间均设有连接板B,连接板B的上端与导向杆铰接,下端与夹爪的上端铰接,夹爪的下端为夹取端。本实用新型通过一个动力源实现多个夹爪的同时打开或闭合,夹爪开合的行程较大,可对重量较大及体积差异大的球形物体进行可靠夹取。夹取。夹取。
技术研发人员:佟中华 刘世昌 刘双宁 张建兵 张克溪 韩伟
受保护的技术使用者:山东新松工业软件研究院股份有限公司
技术研发日:2021.12.23
技术公布日:2022/6/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1