一种具有高稳定性的机器人底盘的制作方法
1.本实用新型涉及机器人领域,尤其涉及一种具有高稳定性的机器人底盘。
背景技术:
2.随着社会经济的快速发展,越来越多的场合需要特种履带机器人配合作业,在城市生活中,机器人可以承担运输物品、公共咨询服务等,但是常规的机器人由于行动组件过于强硬导致机器人在运行时容易与路面不平产生颠簸,使得机器人内部运输的物品倾洒、破损。
3.所以设计一款能够提升机器人稳定性的底盘是解决机器人在运动时产生颠簸的最好方式。
技术实现要素:
4.为解决上述技术问题,本实用新型提供一种具有高稳定性的机器人底盘,以解决机器人由于行动组件过于强硬导致机器人在运行时容易与路面不平产生颠簸,使得机器人内部运输的物品倾洒、破损的问题。
5.本实用新型一种具有高稳定性的机器人底盘的目的与功效,由以下具体技术手段达成:一种具有高稳定性的机器人底盘,包括主体、轴套,所述主体顶部中心开设有用于安装机器人的镶嵌槽,且主体前后两端侧壁上开设有贯穿主体的轮孔,同时轮孔两侧孔内活动连接有轴套,并且轴套内部固定连接有行动组件。
6.其中,所述行动组件由车轮、轮轴组成,所述轮轴穿过轴套内部,且车轮转动连接于轮轴两端,同时轮轴内部两端固定连接有与车轮啮合的电机。
7.其中,所述轴套中心开设有前后贯穿的通孔,且通孔内部中心内壁中开设有板槽,且板槽中活动连接有多块独立设置的接触板,同时轴套外壁上固定连接有多根与接触板连接的缓冲支柱。
8.其中,所述缓冲支柱一端设于轮孔中,且缓冲支柱内部呈空心结构,同时缓冲支柱底部设有伸缩结构,所述缓冲支柱柱身上设有伸缩段,且伸缩段顶部的缓冲支柱柱身上设有进气槽。
9.其中,所述伸缩段为高强度弹性橡胶壁构成,且具有自动回弹能力。
10.其中,所述伸缩结构包括活塞板、顶杆,所述活塞板活动连接于缓冲支柱内部,且活塞板与缓冲支柱内部呈密封连接,所述顶杆顶端固定连接于活塞板底部,且顶杆末端接触板顶部固定连接,同时活塞板与缓冲支柱内底部之间的顶杆杆身上套接有弹簧。
11.其中,所述接触板内部呈空心结构,且接触板两侧侧壁上开设有透气网,同时接触板内部固定连接有延伸至接触板底部外的二次缓冲组件。
12.其中,所述二次缓冲组件包括支撑板、滚珠,所述支撑板设置有两块并分别设立于滚珠两侧,同时支撑板底部固定连接于接触板内底部。
13.其中,所述支撑板内部呈空心设置,且支撑板上下两端活动连接有轴板,同时轴板
与支撑板之间固定连接有弹簧,并且支撑板侧壁上开设有可供滚珠上下移动的滑槽。
14.其中,所述滚珠中心横向贯穿连接有连接轴,且连接轴延伸至支撑板内部的滑槽内并夹持与轴板之间,所述连接轴内部呈空心结构,且连接轴两端内部固定连接有透气扇
15.有益效果:
16.(1)通过设有轴套,利用轴套内部的通孔将行动组件进行固定,并利用轴套外部的缓冲支柱对运动时产生的颠簸进行缓冲,实现对颠簸冲击力进行缓冲的效果。
17.(2)通过设有缓冲支柱,利用其杆身上的伸缩段自身具有的弹性对颠簸冲击力进行缓冲,并压缩缓冲支柱内部的气体使得密封板带动顶杆向缓冲支柱底部移动,从而使得接触板与轮轴接触产生反向推力,实现减少颠簸的效果。
18.(3)通过设有二次缓冲组件,利用其内部的滚珠与轮轴接触从而不影响轮轴的传动力,且滚珠收到冲击时将利用轴板及弹簧向支撑板上端移动,实现二次缓冲的效果。
19.(4)通过设有滚珠,利用滚珠旋转时带动连接轴一同旋转,使得连接轴内部的透气扇将外部空气吸入接触板内部,实现增加接触板内部空气流通提高轴套散热效果。
附图说明
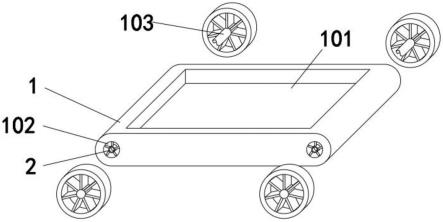
20.图1为本实用新型整体结构示意图。
21.图2为本实用新型轴套结构示意图。
22.图3为本实用新型接触板与缓冲支柱结构示意图。
23.图4为本实用新型缓冲支柱剖面结构示意图。
24.图5为本实用新型接触板剖面结构示意图。
25.图6为本实用新型a处放大结构示意图。
26.图1-6中,部件名称与附图编号的对应关系为:
27.1-主体、101-镶嵌槽、102-轮孔、103-行动组件、2-轴套、201-板槽、202-接触板、203-缓冲支柱、204-伸缩段、205-进气槽、206-活塞板、207-顶杆、208-透气网、209-二次缓冲组件、210-滚珠、211-支撑板、212-连接轴、213-轴板、214-透气扇。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.实施例一:
30.如附图1至附图4所示:
31.首先,将机器人主体安装于镶嵌槽101内,并通过行动组件103带着本实用新型整体进行移动,当运动时产生颠簸时,轴套2外部的缓冲支柱203将向受力方向进行收缩减缓颠簸冲击力,此时,缓冲支柱203柱身上的伸缩段204将进行收缩,并且将缓冲支柱203中的空气进行压缩,使得活塞板206向缓冲支柱203底部移动,同时,活塞板206底部的顶板将顶动接触板202伸出板槽201,使接触板202与轮轴接触,从而对轮轴产生反向推力使得轮轴保持在原始位置,达到减少颠簸的效果。
32.实施例二:
33.如附图5至附图6所示:
34.当接触板202与轮轴接触时,且接触板202底部中的二次缓冲组件209将与轮轴接触,此时,滚珠210在支撑板211内部弹簧及轴板213的配合下将产生一定的弹性,从而对轮轴产生的颠簸进行二次缓冲,同时,当滚珠210与轮轴接触时滚珠210将与轮轴啮合旋转,滚珠210中心的连接轴212一同旋转并利用其内部的透气扇214将外部空气吸入其内部,使得接触板202内部利用透气网208及透气扇214形成空气流动,实现对接触板202进行散热的效果,防止接触板202长时间接触发热降低其使用寿命的效果。
35.工作原理:首先,将机器人主体安装于镶嵌槽101内,并通过行动组件103带着本实用新型整体进行移动,当运动时产生颠簸时轴套2外部的缓冲支柱203将利用伸缩段204的弹性对颠簸进行缓冲,并且将缓冲支柱203中的空气进行压缩将接触板202顶出,当接触板202与轮轴接触时,且接触板202底部中的二次缓冲组件209将与轮轴接触,在支撑板211内部弹簧及轴板213的配合下对轮轴产生的颠簸进行二次缓冲,并且在滚珠210旋转时透气扇214将外部空气吸入其内部,使得接触板202内部利用透气网208及透气扇214形成空气流动,实现对接触板202进行散热的效果,防止接触板202长时间接触发热降低其使用寿命的效果。
技术特征:
1.一种具有高稳定性的机器人底盘,包括主体(1)、轴套(2),所述主体(1)顶部设有安装机器人的槽口,且主体(1)前后两端开设有轮孔(102),其特征在于:所述轮孔(102)两端设有轴套(2),且轴套(2)中设有行动组件(103)。2.根据权利要求1所述的具有高稳定性的机器人底盘,其特征在于:所述行动组件(103)由车轮、轮轴组成,所述轮轴设于轴套(2)内,且轮轴内部设有动力件,同时车轮设于轮轴两端并与动力件连接。3.根据权利要求1所述的具有高稳定性的机器人底盘,其特征在于:所述轴套(2)中心开设有通孔,且通孔中设有多块独立的接触板(202),同时轴套(2)外部设有缓冲支柱(203)。4.根据权利要求3所述的具有高稳定性的机器人底盘,其特征在于:所述缓冲支柱(203)一端设于轮孔(102)中,另一端与接触板(202)连接,且缓冲支柱(203)底部设有伸缩结构,同时缓冲支柱(203)柱身上设有伸缩段(204),并且伸缩段(204)上的缓冲支柱(203)上设有透气结构。5.根据权利要求4所述的具有高稳定性的机器人底盘,其特征在于:所述伸缩段(204)为高强度弹性橡胶壁构成,且具有自动回弹能力。6.根据权利要求4所述的具有高稳定性的机器人底盘,其特征在于:所述缩结构包括活塞板(206)、顶杆(207),所述活塞板(206)设于缓冲支柱(203)内部,且顶杆(207)设立于活塞板(206)底部,同时顶杆(207)末端与接触板(202)连接,并且活塞板(206)与缓冲支柱(203)内底部之间的顶杆(207)杆身上套接有弹性件。7.根据权利要求3所述的具有高稳定性的机器人底盘,其特征在于:所述接触板(202)内部为空心结构,且接触板(202)两侧设有进气结构,所述接触板(202)内部设有延伸至接触板(202)外的二次缓冲组件(209)。8.根据权利要求7所述的具有高稳定性的机器人底盘,其特征在于:所述二次缓冲组件(209)包括支撑板(211)、滚珠(210),所述支撑板(211)设置于滚珠(210)两侧,且支撑板(211)底部连接于接触板(202)内底部,同时滚珠(210)设立于支撑板(211)之间。9.根据权利要求8所述的具有高稳定性的机器人底盘,其特征在于:所述支撑板(211)侧壁开设有滑槽,同时支撑板(211)上下两端设有连接件。10.根据权利要求8所述的具有高稳定性的机器人底盘,其特征在于:所述滚珠(210)中心设有连接轴(212),且连接轴(212)延伸至支撑板(211)中的连接件之间,同时连接轴(212)内部呈空心结构,并且连接轴(212)内部设有导气结构。
技术总结
本实用新型涉及机器人领域,尤其涉及一种具有高稳定性的机器人底盘,包括主体、轴套,所述主体顶部中心开设有用于安装机器人的镶嵌槽,且主体前后两端侧壁上开设有贯穿主体的轮孔,同时轮孔两侧孔内活动连接有轴套,并且轴套内部固定连接有行动组件,本实用新型提供一种具有高稳定性的机器人底盘为解决机器人由于行动组件过于强硬导致机器人在运行时容易与路面不平产生颠簸,使得机器人内部运输的物品倾洒、破损的问题。破损的问题。破损的问题。
技术研发人员:杜林
受保护的技术使用者:东莞市均谊视觉科技有限公司
技术研发日:2021.12.24
技术公布日:2022/8/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1