一种多足机器人的自动跟随装置的制作方法
1.本申请涉及机器人技术领域,尤其涉及一种多足机器人的自动跟随装置。
背景技术:
2.机器人(robot)是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力。
3.但是在实际使用过程中,机器人使用不够灵活,主人不便于控制机器人,且不易对外壳内的uwb模块进行维修或更换,使用较为不便,实用性较差。
技术实现要素:
4.本实用新型的目的在于提供一种多足机器人的自动跟随装置,以解决上述背景技术中提出的问题。
5.本申请实施例采用下述技术方案:
6.一种多足机器人的自动跟随装置,一种多足机器人的自动跟随装置,包括机器人本体,所述机器人本体的上端部安装有雷达,所述机器人本体上安装有四个支撑腿,每个所述支撑腿的底端均固定安装有橡胶垫,所述机器人本体上安装有外壳,所述外壳内设置有uwb模块,所述外壳的底端固定连接有连接板,所述连接板的两侧端部均固定连接有插块,所述外壳与机器人本体之间设置有连接结构。
7.优选的,所述连接结构包括安装座、连接件和挡板,所述安装座为圆环形状,安装座固定安装在机器人本体上,所述安装座的两侧内壁面均开设有插槽,两个所述插槽的两侧内壁面均开设有定位槽,两个所述插槽的两侧内壁面均开设有滑槽,所述安装座的表面开设有圆形槽,所述圆形槽的侧壁面开设有环形槽。
8.优选的,两个所述插块分别插入在插槽和定位槽内,所述连接件为弧形状,所述连接件的上端部固定连接有提手。
9.所述连接件的底端固定连接有圆杆,所述圆杆的底端固定连接有圆板,所述圆杆的比哦面活动套接有弹簧一。
10.所述圆杆活动设置在圆形槽内,所述圆板滑动设置在环形槽内,所述连接件底端的两侧均固定连接有定位杆,两个所述定位杆分别插入在两个插块内。
11.所述挡板的数量为两个,两个所述挡板的两侧端部均固定连接有滑块,两个所述滑块分别滑动安装在滑槽内,两个所述挡板的底端均固定连接有弹簧二,两个所述挡板分别通过弹簧二与插槽的内壁面固定连接,两个所述挡板的上表面分别与两个插块的上表面紧密贴合。
12.本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:
13.其一,通过外壳内设置有uwb模块,使得该机器人本体可以跟随主人拿着的手机,到处跑,使得该机器人本体使用起来更加灵活。
14.其二,使用者通过向上提动提手,使得两个定位杆脱离插块,反方向转动外壳即可将其取出,便于拆卸外壳,方便对其进行更换,保证了该机器人本体的正常使用,进一步提高了该机器人本体的实用性。
附图说明
15.此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
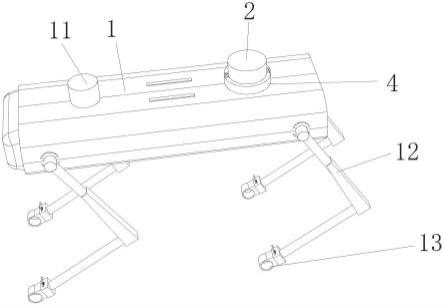
16.图1为本实用新型该装置总体的结构示意图;
17.图2为本实用新型外壳的结构示意图;
18.图3为本实用新型连接件的结构示意图;
19.图4为本实用新型图3中a处放大的结构示意图。
20.图中:1、机器人本体;11、雷达;12、支撑腿;13、橡胶垫;2、外壳;3、连接板;31、插块;4、安装座;41、插槽;42、滑槽;43、定位槽;44、圆形槽;5、连接件;51、提手;52、圆杆;53、圆板;54、弹簧一;55、定位杆;6、挡板;61、滑块;62、弹簧二。
具体实施方式
21.为使本申请的目的、技术方案和优点更加清楚,下面将结合本申请具体实施例及相应的附图对本申请技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
22.以下结合附图,详细说明本申请各实施例提供的技术方案。
23.请参阅图1、图2、图3和图4,一种多足机器人的自动跟随装置,包括机器人本体1,机器人本体1的上端部安装有雷达11,机器人本体1上安装有四个支撑腿12,每个支撑腿12的底端均固定安装有橡胶垫13,机器人本体1上安装有外壳2,外壳2内设置有uwb模块,外壳2的底端固定连接有连接板3,连接板3的两侧端部均固定连接有插块31,外壳2与机器人本体1之间设置有连接结构,连接结构包括安装座4、连接件5和挡板6,安装座4为圆环形状,安装座4固定安装在机器人本体1上,安装座4的两侧内壁面均开设有插槽41,两个插槽41的两侧内壁面均开设有定位槽43,两个插槽41的两侧内壁面均开设有滑槽42,安装座4的表面开设有圆形槽44,圆形槽44的侧壁面开设有环形槽,两个插块31分别插入在插槽41和定位槽43内,连接件5为弧形状,连接件5的上端部固定连接有提手51,连接件5的底端固定连接有圆杆52,圆杆52的底端固定连接有圆板53,圆杆52的比哦面活动套接有弹簧一54,圆杆52活动设置在圆形槽44内,圆板53滑动设置在环形槽内,连接件5底端的两侧均固定连接有定位杆55,两个定位杆55分别插入在两个插块31内,挡板6的数量为两个,两个挡板6的两侧端部均固定连接有滑块61,两个滑块61分别滑动安装在滑槽42内,两个挡板6的底端均固定连接有弹簧二62,两个挡板6分别通过弹簧二62与插槽41的内壁面固定连接,两个挡板6的上表面分别与两个插块31的上表面紧密贴合。
24.在使用时,使用者通过将两个插块31对准插槽41插入进去,此时两个插槽41将会对挡板6施加压力,使得弹簧二62受力压缩,向上提动提手51,使得圆杆52向上移动,使得弹簧一54受力压缩,然后旋转外壳2,使得两个插块31卡接在定位槽43内,使得外壳2初步固定
在连接板3内,松开提手51,由于弹簧一54的弹性作用,使得连接件5复位,使得两个定位杆55插入在插块31内,使得插块31固定在定位槽43内,使得外壳2与连接板3固定完成,安装较为方便,通过外壳2内设置有uwb模块(超宽带(ultrawide band,uwb)技术是一种无线载波通信技术,它不采用正弦载波,而是利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽),该机器人本体1可以跟随主人拿着的手机,到处跑,使得该机器人本体1使用起来更加灵活,当需要对外壳2进行更换或维修时,使用者通过向上提动提手51,使得两个定位杆55脱离插块31,反方向转动外壳2即可将其取出,便于拆卸外壳2,方便对其进行更换,保证了该机器人本体1的正常使用,进一步提高了该机器人本体1的实用性。
25.以上所述仅为本申请的实施例而已,并不用于限制本申请。对于本领域技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本申请的权利要求范围之内。
技术特征:
1.一种多足机器人的自动跟随装置,包括机器人本体(1),其特征在于:所述机器人本体(1)的上端部安装有雷达(11),所述机器人本体(1)上安装有四个支撑腿(12),每个所述支撑腿(12)的底端均固定安装有橡胶垫(13),所述机器人本体(1)上安装有外壳(2),所述外壳(2)内设置有uwb模块,所述外壳(2)的底端固定连接有连接板(3),所述连接板(3)的两侧端部均固定连接有插块(31);所述外壳(2)与机器人本体(1)之间设置有连接结构。2.根据权利要求1所述的一种多足机器人的自动跟随装置,其特征在于:所述连接结构包括安装座(4)、连接件(5)和挡板(6),所述安装座(4)为圆环形状,安装座(4)固定安装在机器人本体(1)上,所述安装座(4)的两侧内壁面均开设有插槽(41),两个所述插槽(41)的两侧内壁面均开设有定位槽(43),两个所述插槽(41)的两侧内壁面均开设有滑槽(42),所述安装座(4)的表面开设有圆形槽(44),所述圆形槽(44)的侧壁面开设有环形槽。3.根据权利要求2所述的一种多足机器人的自动跟随装置,其特征在于:两个所述插块(31)分别插入在插槽(41)和定位槽(43)内,所述连接件(5)为弧形状,所述连接件(5)的上端部固定连接有提手(51)。4.根据权利要求3所述的一种多足机器人的自动跟随装置,其特征在于:所述连接件(5)的底端固定连接有圆杆(52),所述圆杆(52)的底端固定连接有圆板(53),所述圆杆(52)的比哦面活动套接有弹簧一(54)。5.根据权利要求4所述的一种多足机器人的自动跟随装置,其特征在于:所述圆杆(52)活动设置在圆形槽(44)内,所述圆板(53)滑动设置在环形槽内,所述连接件(5)底端的两侧均固定连接有定位杆(55),两个所述定位杆(55)分别插入在两个插块(31)内。6.根据权利要求5所述的一种多足机器人的自动跟随装置,其特征在于:所述挡板(6)的数量为两个,两个所述挡板(6)的两侧端部均固定连接有滑块(61),两个所述滑块(61)分别滑动安装在滑槽(42)内,两个所述挡板(6)的底端均固定连接有弹簧二(62),两个所述挡板(6)分别通过弹簧二(62)与插槽(41)的内壁面固定连接,两个所述挡板(6)的上表面分别与两个插块(31)的上表面紧密贴合。
技术总结
本实用新型涉及机器人技术领域,尤其涉及一种多足机器人的自动跟随装置,包括包括机器人本体,所述机器人本体的上端部安装有雷达,所述机器人本体上安装有四个支撑腿,每个所述支撑腿的底端均固定安装有橡胶垫,所述机器人本体上安装有外壳,所述外壳内设置有UWB模块,所述外壳的底端固定连接有连接板。本实用新型通过外壳内设置有UWB模块,使得该机器人本体可以跟随主人拿着的手机,到处跑,使得该机器人本体使用起来更加灵活,使用者通过向上提动提手,使得两个定位杆脱离插块,反方向转动外壳即可将其取出,便于拆卸外壳,方便对其进行更换,保证了该机器人本体的正常使用,进一步提高了该机器人本体的实用性。提高了该机器人本体的实用性。提高了该机器人本体的实用性。
技术研发人员:夏俊
受保护的技术使用者:泰州朵儿智能科技有限公司
技术研发日:2021.12.26
技术公布日:2022/7/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1