机器人以及手部姿势调整方法与流程
本发明主要涉及机器人,该机器人用于运送半导体晶片、印刷电路板等基板,详细而言,涉及保持基板的手部的姿势调整。
背景技术:
1、至今为止,从基板的保管装置、基板处理装置等取出基板进行运送的基板运送用的机器人被众所周知。专利文献1公开了作为该种机器人的晶片运送装置。
2、专利文献1的晶片运送装置包括姿势检测部和致动器,该姿势检测部检测手的姿势。该晶片运送装置的结构如下,即,通过根据用姿势检测部所检测的手的姿势信息,控制致动器的伸缩程度,来调整手的姿势。
3、专利文献1:日本特开2004-128021号公报
技术实现思路
1、在上述专利文献1中,能够想到由于某些理由,有时被手保持之前的基板的姿势与正常情况不同。当基板的姿势不适当时,恐怕会在机器人保持该基板的动作的过程中损坏基板。
2、鉴于上述内容,本发明的目的在于提供一种在取出基板之前能够根据基板的姿势灵活调整手的姿势的机器人。
3、本发明所要解决的课题如上所述,接下来对用于解决该课题的手段和其效果进行说明。
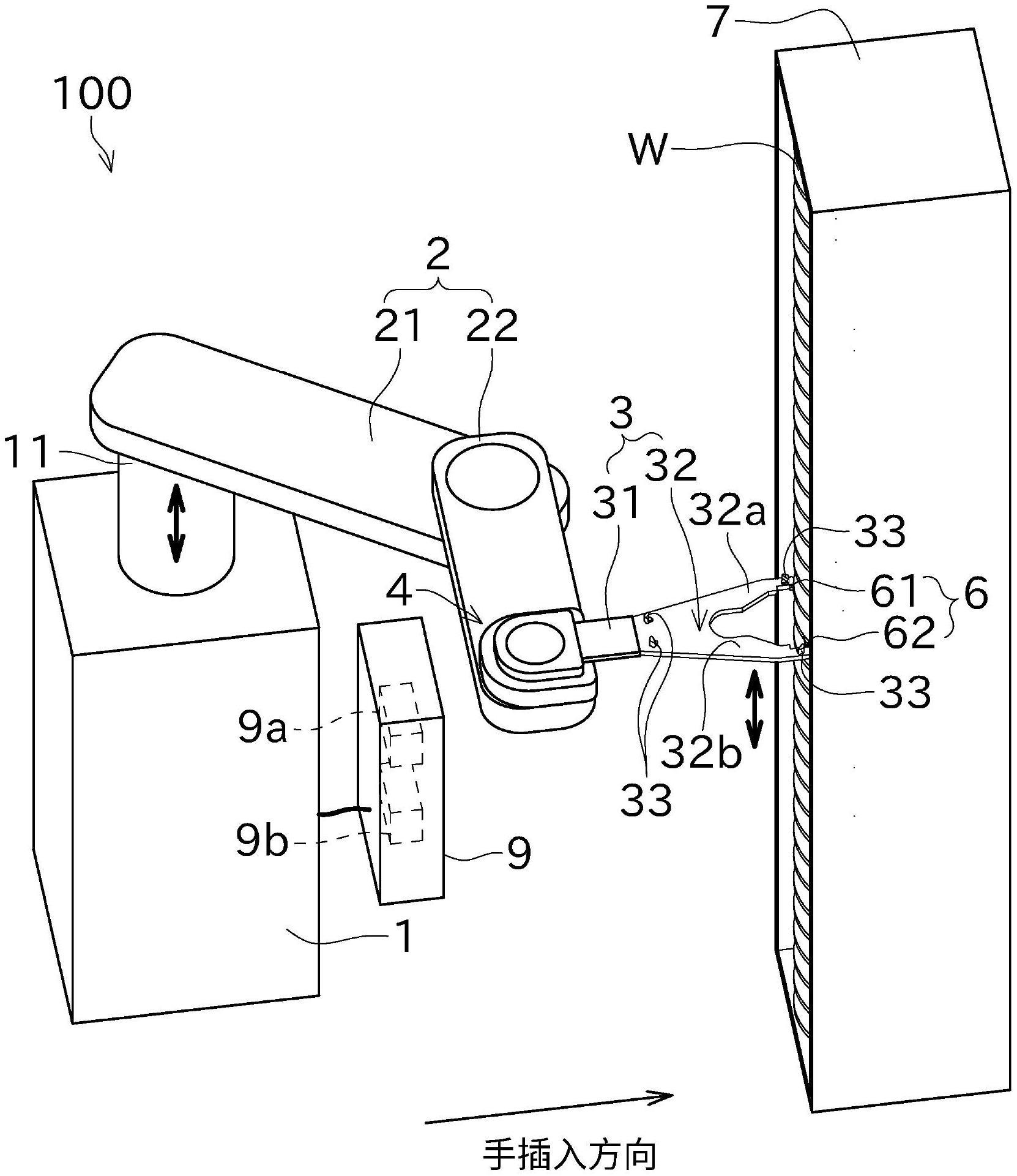
4、根据本发明的第一方面,提供以下结构的机器人。即,用于运送基板的机器人包括臂部、手部、基板姿势取得部、手姿势调整部和手姿势控制部。所述手部被设置在所述臂部,保持且运送所述基板。所述基板姿势取得部取得与预定运送的所述基板即运送预定基板的姿势相关的信息。所述手姿势调整部能够调整所述手部相对于所述运送预定基板的姿势。所述手姿势控制部对所述手姿势调整部的动作进行控制。所述手姿势控制部根据与所述运送预定基板的姿势相关的信息,用所述手姿势调整部调整对于所述运送预定基板进行取出作业的所述手部的姿势。
5、根据本发明的第二方面,提供以下的手部姿势调整方法。即,该手部姿势调整方法作为对象的机器人包括臂部、手部、基板姿势取得部和手姿势调整部,运送基板。在所述手部姿势调整方法中,调整所述手部的姿势。所述手部被设置在所述臂部,保持且运送所述基板。所述基板姿势取得部取得与预定运送的所述基板即运送预定基板的姿势相关的信息。所述手姿势调整部能够调整所述手部相对于所述运送预定基板的姿势。在所述手部姿势调整方法中,根据与所述运送预定基板的姿势相关的信息,用所述手姿势调整部来调整对于所述运送预定基板进行取出作业的所述手部的姿势。
6、因此,当从基板保管装置等中取出运送预定基板时,即使该基板的姿势不适当,也能够在使手部的姿势配合基板的状态下将基板取出。因此,能够防止基板的损坏等,顺利地取出基板。
7、(发明的效果)
8、根据本发明,机器人能够在取出基板之前,根据基板的姿势灵活地调整手的姿势。
技术特征:
1.一种机器人,其用于运送基板,其特征在于:
2.根据权利要求1所述的机器人,其特征在于:
3.根据权利要求2所述的机器人,其特征在于:
4.根据权利要求1~3中任意一项所述的机器人,其特征在于:
5.根据权利要求4所述的机器人,其特征在于:
6.根据权利要求4或5所述的机器人,其特征在于:
7.一种手部姿势调整方法,其通过运送所述基板的机器人来调整所述手部的姿势,该机器人包括臂部、手部、基板姿势取得部和手姿势调整部,所述手部被设置在所述臂部,保持且运送基板,所述基板姿势取得部取得与预定运送的所述基板即运送预定基板的姿势相关的信息,所述手姿势调整部能够调整所述手部相对于所述运送预定基板的姿势,其特征在于:
技术总结
本发明提供一种用于运送基板的机器人,该机器人包括臂部、手部、基板姿势取得部、手姿势调整部和控制部。所述手部被设置在所述臂部,保持且运送所述基板。所述基板姿势取得部取得与预定运送的所述基板即运送预定基板的姿势相关的信息。所述手姿势调整部能够调整所述手部相对于所述运送预定基板的姿势。所述控制部对所述臂部、所述手部以及所述手姿势调整部的动作进行控制。所述控制部根据与所述运送预定基板的姿势相关的信息,用所述手姿势调整部调整对于所述运送预定基板进行取出作业的所述手部的姿势。
技术研发人员:清水一平,冈田拓之,山中大辅,阿部任弘,佐藤淳一
受保护的技术使用者:川崎重工业株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!