机器人控制系统的制作方法
本发明涉及控制机器人的机器人控制系统。
背景技术:
1、工业用机器人一般将使用示教操作盘或编程装置而生成的动作程序加载到机器人控制装置,并从机器人控制装置进行控制而进行动作。另一方面,近年来,通过plc(可编程逻辑控制器)来控制工业机器人的系统也正在普及(例如,专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:国际公开第2019/180916号
技术实现思路
1、发明所要解决的课题
2、近年来,由于plcopen(注册商标)标准等的普及,用于工业用机器人的控制的plc程序的开发环境的整备也在不断发展。在使用了plc的机器人控制系统中,通常,通过plc程序的执行从plc向机器人控制装置发送针对机器人的动作命令,在机器人控制装置侧基于来自plc的动作命令生成动作程序并控制机器人。在这样的机器人控制系统中,若设想进行使用了plc程序的机器人的示教设定、plc程序开发时的动作确认的场景,则plc程序与机器人控制装置侧的动作程序是不同的程序规格,因此,plc程序与机器人控制装置的动作程序的对应对于用户来说而言难以理解,在错误发生时的调查等中需要时间。
3、用于解决课题的手段
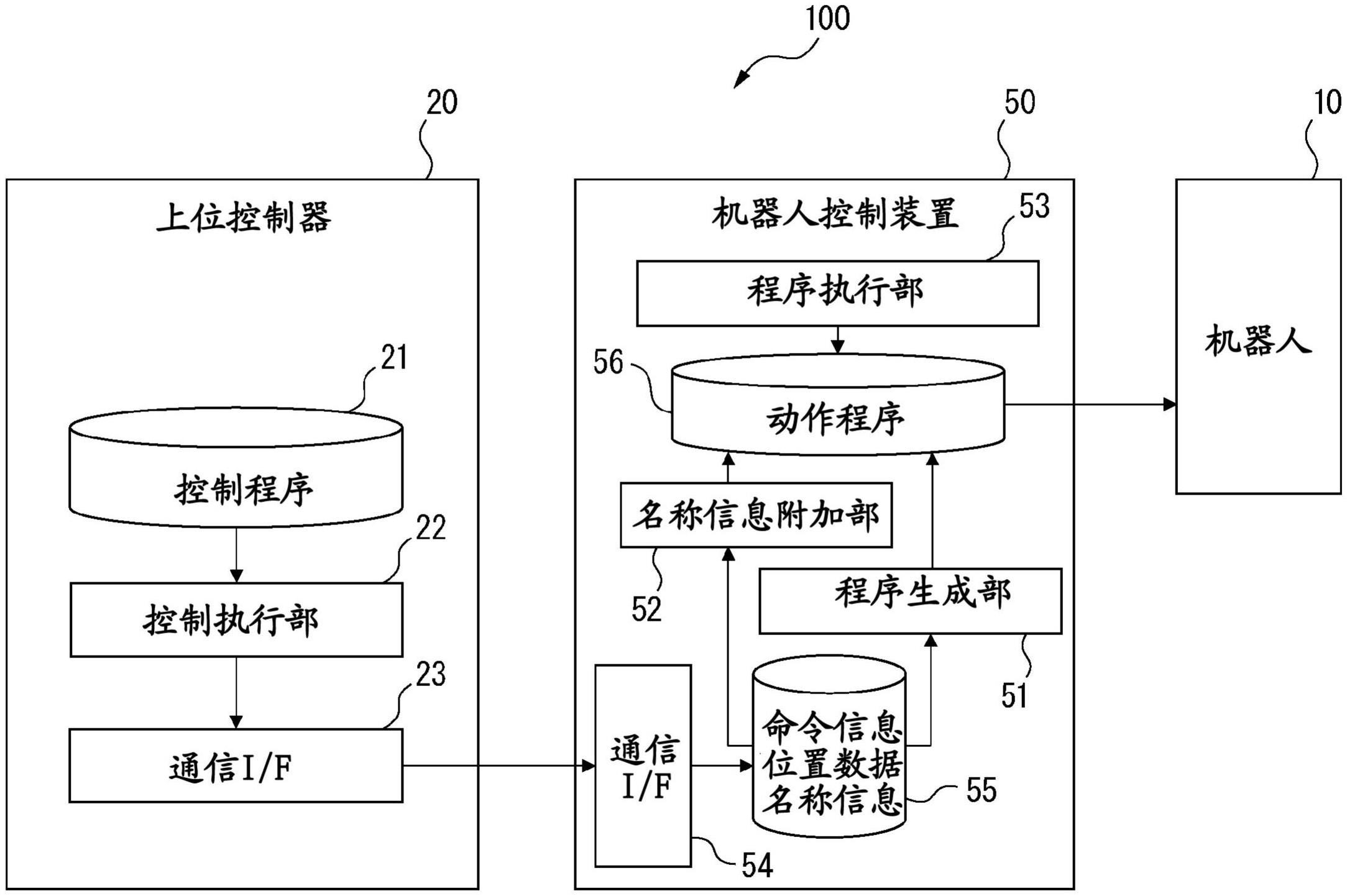
4、本公开的一个方式是一种具备上位控制器和与该上位控制器连接的机器人控制装置的机器人控制系统,其中,所述上位控制器具备:控制执行部,其基于用于控制机器人的控制程序,将表示针对所述机器人的动作命令的命令信息和附带于该动作命令的位置数据与表示该位置数据的名称的名称信息一起发送到所述机器人控制装置,所述机器人控制装置具备:程序生成部,其基于接收到的所述命令信息和所述位置数据,生成针对所述机器人的动作程序;名称信息附加部,其对所述动作程序内的所述位置数据附加接收到的所述名称信息表示的所述名称。
5、发明效果
6、根据上述结构,用户能够容易地掌握上位控制器的控制程序与机器人控制装置的动作程序如何对应。由此,能够高效地进行示教设定、编程时的错误调查和调试。
7、根据附图所示的本发明的典型实施方式的详细说明,本发明的这些目的、特征及优点以及其他目的、特征及优点将变得更加明确。
技术特征:
1.一种机器人控制系统,具备上位控制器和与该上位控制器连接的机器人控制装置,其特征在于,
2.根据权利要求1所述的机器人控制系统,其特征在于,
3.根据权利要求1或2所述的机器人控制系统,其特征在于,
4.根据权利要求3所述的机器人控制系统,其特征在于,
5.根据权利要求1或2所述的机器人控制系统,其特征在于,
6.根据权利要求5所述的机器人控制系统,其特征在于,
技术总结
本发明提供一种能够对用户来说容易理解上位控制器的程序与机器人控制装置的动作程序的对应的机器人控制系统。在具备上位控制器(20)和机器人控制装置(50)的机器人控制系统(100)中,上位控制器(20)具备:控制执行部(22),其基于用于控制机器人的控制程序,将表示针对机器人的动作命令的命令信息和附带于该动作命令的位置数据与表示该位置数据的名称的名称信息一起发送到机器人控制装置(50),机器人控制装置(50)具备:程序生成部(51),其基于接收到的命令信息和位置数据来生成针对机器人的动作程序;名称信息附加部(52),其对动作程序内的位置数据附加接收到的名称。
技术研发人员:加藤友树
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!