机器人系统的制作方法
本发明涉及一种机器人系统。
背景技术:
1、近年来,例如提出了如下技术方法:将机器人载置于台车、agv(automated guidedvehicle:无人搬运车)并进行移动,通过配置于机床等工业用机械的作业空间侧附近的机器人将各种作业自动化。
2、在此,例如在具备使用机床和台车、agv等并配置于规定的位置的机器人的系统中,在机器人对机床进行加工对象物的装载/卸载这样的各种作业的情况下,搭载有机器人的台车、agv的停止位置改变,因此机器人仅每次进行相同的动作无法充分地应对必要作业。
3、因此,需要对机器人的动作进行校正,以便能够测量台车、agv相对于机床的停止位置的偏移,并对作业空间正确地进行作业。
4、作为对机器人的动作进行校正的方法,例如提出了如下方法:在机器人的指尖安装照相机,使用该照相机检测设置于作业空间的目标标记,由此求出机器人与机床等的作业空间的相对位置关系,校正位置偏移量。
5、例如,在专利文献1中公开了“一种移动机器人的坐标校正方法,其特征在于,该移动机器人具备在臂上安装有视觉传感器的回放方式作业机器人,当该作业机器人停止进入作业台时,在作业程序开始之前,使上述视觉传感器呈铅垂姿势对设置于上述作业台的规定部位表面的2个标记进行拍摄,通过图像处理装置求出上述标记的水平坐标,运算该水平坐标与示教水平坐标的偏移,利用上述偏移校正所示教的作业程序的水平座坐标并执行该作业程序,该坐标校正方法具有在上述作业程序开始之前使上述视觉传感器仅倾斜规定角度θ而对上述标记进行拍摄的步骤,根据该图像来运算该标记的水平坐标,根据该水平坐标与同一倾斜姿势下的示教水平坐标的偏移来取出垂直方向的偏移量σ,执行基于公式:δh=σ/sinθ的运算,使用该δh的值来校正所示教的上述作业程序的垂直坐标”。
6、在专利文献2中公开了“一种自主行走机器人的三维位置姿势校正方法,该自主行走机器人具备自主行走的行走部和搭载于该行走部上的示教再生型机器人的臂部,在通过上述行走部朝向机器人作业的目的地点行走并在目的地点停止时,通过设置于上述臂部的视觉传感器对被安装于上述目的地点的规定位置的校正标记进行拍摄,并基于该拍摄图像对上述目的地点的停止位置距离示教位置的误差进行校正,其特征在于,以在上述拍摄图像的规定位置通过规定形状、规定尺寸拍摄上述校正标记的图像的方式驱动上述臂部的各动作轴,根据该各动作轴的驱动量求出三维位置、姿势的校正量,并基于该校正量对上述臂部的示教数据进行三维校正”。
7、现有技术文献
8、专利文献
9、专利文献1:日本特开平03-281182号公报
10、专利文献2:日本特开平09-070781号公报
技术实现思路
1、发明所要解决的课题
2、然而,在台车、agv上载置机器人,每次机器人的位置发生偏移的情况下,强烈期望能够使用照相机等容易地进行三维校正来进行作业。
3、即,强烈期望不仅能够简单地进行作业,而且能够在不使用户特别意识到其难度的情况下简单且迅速地进行作业。
4、用于解决课题的手段
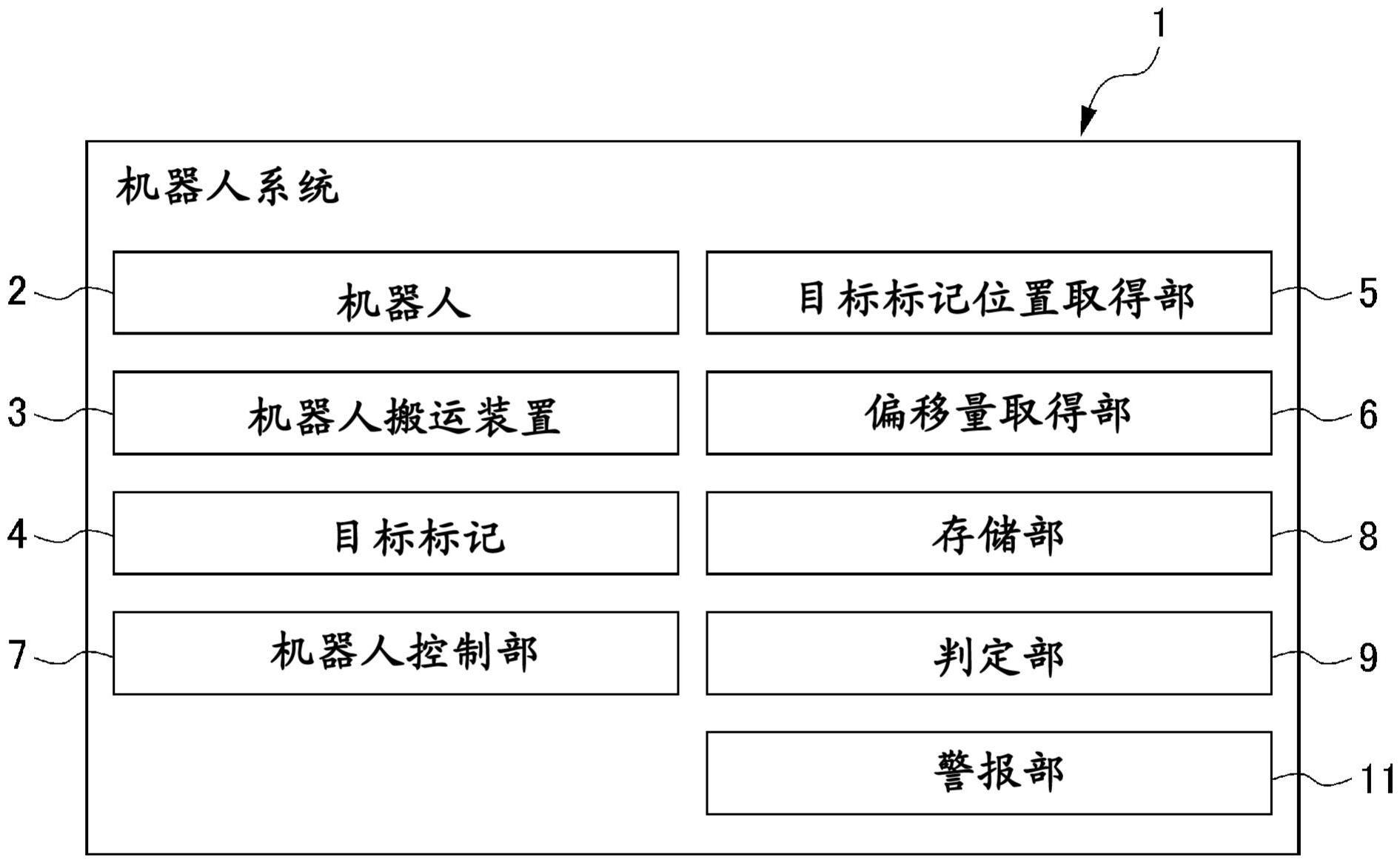
5、本公开的机器人系统的一个方式构成为具备:机器人;机器人搬运装置,其用于搭载所述机器人并向规定的作业空间移动;至少2个目标标记,其被设置于所述作业空间;目标标记位置取得部,其利用设置于所述机器人的视觉传感器对所述至少2个目标标记进行立体测量来求出三维位置;偏移量取得部,其根据所取得的所述三维位置求出所述机器人与所述作业空间离所期望的相对位置的偏移量;机器人控制部,其使用所取得的所述偏移量使所述机器人以根据规定的动作量校正后的值进行动作。
6、发明效果
7、根据本公开的机器人系统的一方式,即使在机器人的位置因台车、agv等机器人搬运装置的移动而偏移的情况下,机器人也能够进行三维校正而在准确的相对位置进行作业。
8、通过分别对2点以上的目标标记进行立体测量,例如能够使用廉价的二维照相机进行三维校正。
9、即使用户没有意识到坐标系的概念、景象的设定等,也能够自动地进行校正,能够使机器人高精度且适当地进行动作来实施作业。
技术特征:
1.一种机器人系统,其特征在于,具备:
2.根据权利要求1所述的机器人系统,其特征在于,
3.根据权利要求1或2所述的机器人系统,其特征在于,
4.根据权利要求1至3中的任一项所述的机器人系统,其特征在于,
5.根据权利要求1至4中的任一项所述的机器人系统,其特征在于,
6.根据权利要求1至4中的任一项所述的机器人系统,其特征在于,
7.根据权利要求6所述的机器人系统,其特征在于,
技术总结
本发明提供一种机器人系统,在机器人的位置偏移的情况下,能够使用照相机等容易地进行三维校正来进行作业。该机器人系统具备:机器人(2);机器人搬运装置(3),其用于搭载机器人并向规定的作业空间移动;至少2个目标标记(4),其被设置于作业空间;目标标记位置取得部(5),其利用设置于机器人(2)的视觉传感器对至少2个目标标记(4)进行立体测量来求出三维位置;偏移量取得部(6),其根据所取得的三维位置来求出机器人(2)与作业空间离所期望的相对位置的偏移量;机器人控制部(7),其使用所取得的偏移量使机器人(2)以根据规定的动作量进行校正后的值进行动作。
技术研发人员:高桥悠太郎,藁科文和,吉田顺一郎
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!