机器人系统、控制方法及被动臂与流程
本发明涉及一种机器人系统、控制方法和被动臂。
背景技术:
1、近年来,机器人被用于各种用途。例如,日本特开2013-31890号公报公开了车身的涂装系统。涂装系统具备进行车体的门的开闭和保持门开放状态的门开闭用机器人和能够涂装车体的门内部的涂装用机器人。
技术实现思路
1、在日本特开2013-31890号公报的涂装系统中,涂装用机器人及门开闭用机器人均包括能够自己进行动作的主动臂。由于为两种作业分别设置主动臂,因此成本上升。
2、本发明的目的在于提供一种能够降低成本的机器人系统、控制方法和被动臂。
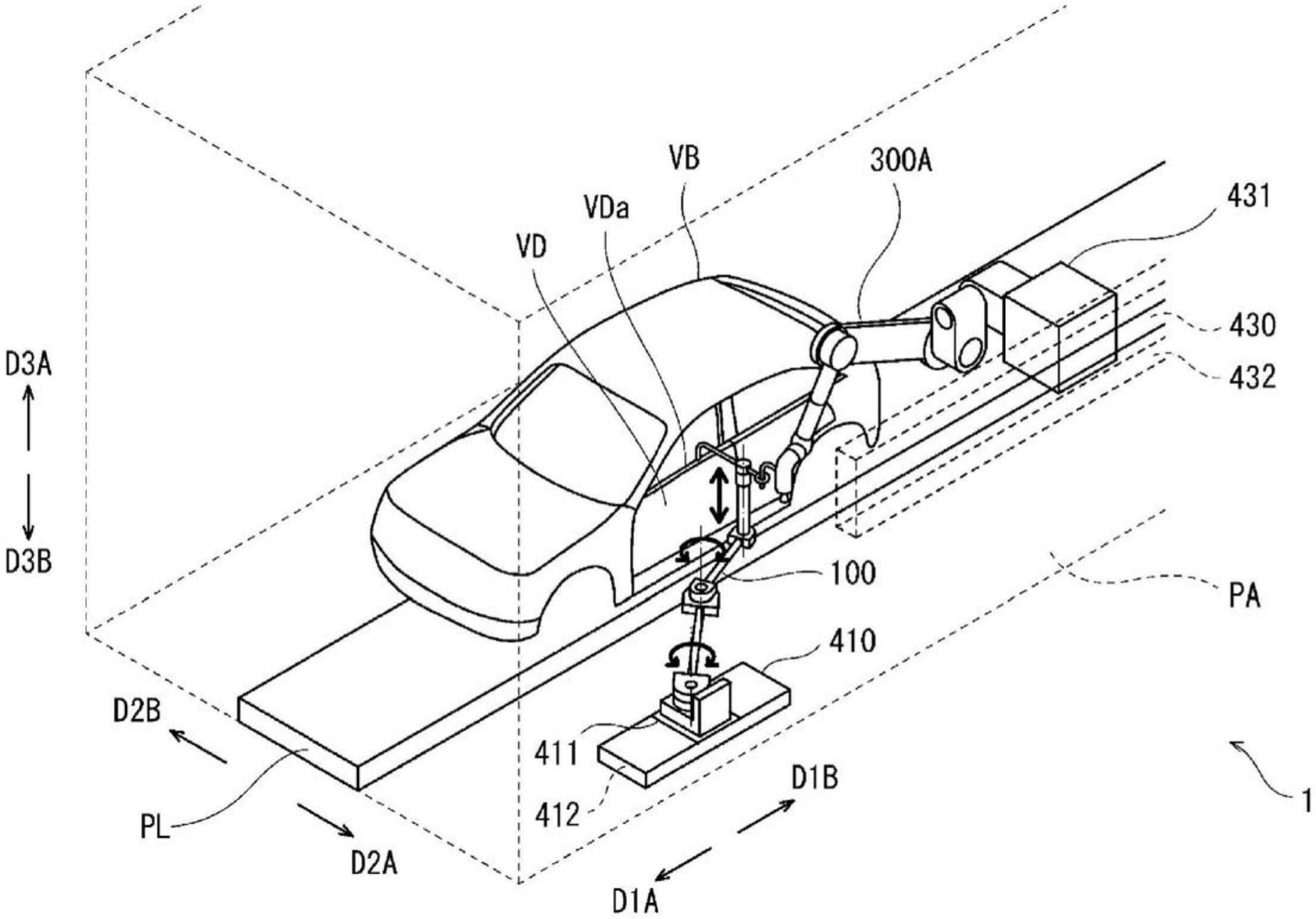
3、本发明一个方式的机器人系统具备:机器人臂;被动臂,其具有两个以上的自由度且与所述机器人臂连结及可连结解除,具有能够与对象物卡合的卡合部,通过与所述被动臂连结的所述机器人臂进行动作;以及控制装置,其控制所述机器人臂的第一动作及第二动作,所述第一动作是所述机器人臂作用于所述对象物的所述机器人臂的动作,所述第二动作是所述机器人臂使所述被动臂作用于所述对象物的所述机器人臂的动作,所述控制装置构成为在所述第二动作中,执行使所述机器人臂与所述被动臂连结、通过所述机器人臂使所述被动臂动作而使所述卡合部与所述对象物卡合以及通过所述机器人臂使与所述对象物卡合的所述被动臂动作而使所述对象物动作。
技术特征:
1.一种机器人系统,其特征在于,具备:
2.根据权利要求1所述的机器人系统,其特征在于,
3.根据权利要求1或2所述的机器人系统,其特征在于,还具备:
4.根据权利要求1~3中任一项所述的机器人系统,其特征在于,还具备:
5.根据权利要求1~4中任一项所述的机器人系统,其特征在于,
6.根据权利要求5所述的机器人系统,其特征在于,还具备:
7.根据权利要求1~6中任一项所述的机器人系统,其特征在于,
8.根据权利要求7所述的机器人系统,其特征在于,
9.根据权利要求1~8中任一项所述的机器人系统,其特征在于,
10.根据权利要求1~9中任一项所述的机器人系统,其特征在于,
11.根据权利要求1~10中任一项所述的机器人系统,其特征在于,
12.根据权利要求1~10中任一项所述的机器人系统,其特征在于,
13.根据权利要求12所述的机器人系统,其特征在于,
14.根据权利要求12或13所述的机器人系统,其特征在于,
15.一种控制方法,其为包括机器人臂及被动臂的机器人系统的控制方法,其特征在于,包括:
16.一种被动臂,其特征在于,具备:
技术总结
机器人系统(1)具备:机器人臂(310A、310B);与所述机器人臂连结及可解除连结且通过所述机器人臂进行动作的被动臂(100、200);以及控制所述机器人臂的第一动作和第二动作的控制装置(500A、500B)。所述第一动作是作用于对象物(VB)的所述机器人臂的动作,所述第二动作是使所述被动臂作用于所述对象物的所述机器人臂的动作。所述控制装置在所述第二动作中,执行使所述机器人臂与所述被动臂连结、通过所述机器人臂使所述被动臂动作而使所述被动臂与所述对象物卡合以及通过所述机器人臂使与所述对象物卡合的所述被动臂动作而使所述对象物动作。
技术研发人员:藤泽真一,伊藤順二
受保护的技术使用者:川崎重工业株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!