机械手指、机械手指的控制方法、装置、设备及介质与流程
本申请涉及机器人领域,特别涉及一种机械手指、机械手指的控制方法、装置、设备及介质。
背景技术:
1、机械手指是一种常用的机器人的末端执行器。随着人工智能的广泛应用,机械手指在生产生活中发挥着重要的作用,成为了人们生产生活中必不可少的设备。
2、以机械手指中的不同指段对应有一个驱动电机为例。相关技术中,通常将第i+1个驱动电机设置于第i个指段的内部,以使得机械手指具有独立的功能模块。具有独立的功能模块的机械手指易于插接在外部设备上,使得机械手指与外部设备能够实现快速安装,以便于实现机械手指在外部设备上的快速更换和维护。
3、然而,将第i+1个驱动电机设置在机械手指的第i个指段的内部,将使得第i个指段的尺寸较大,从而不利于实现对机械手指的每个指段的精密控制。
技术实现思路
1、本申请实施例提供了一种机械手指、机械手指的控制方法、装置、设备及介质,将近指节电机和远指节电机设置于基座中,以使得机械手指的指段的尺寸趋于人手的实际尺寸,从而实现对机械手指的精密控制。所述技术方案至少包括如下方案:
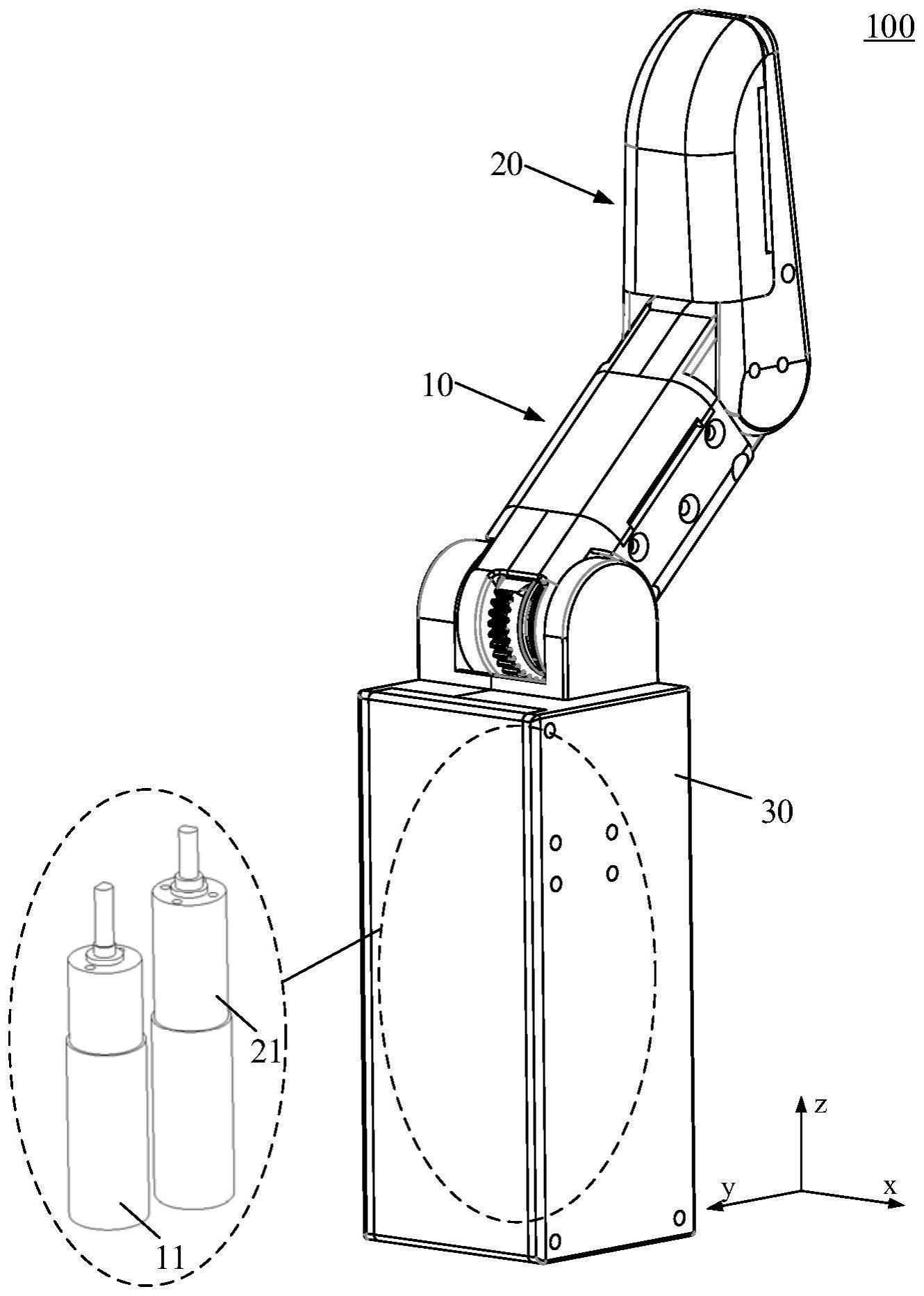
2、根据本申请的一个方面,提供了一种机械手指,所述机械手指包括:近指节、远指节和基座;
3、近指节的底部与基座的顶部活动连接,远指节的底部活动套接于近指节的顶部;
4、近指节电机和远指节电机固定设置于基座中,近指节与近指节电机传动连接,远指节与远指节电机传动连接。
5、根据本申请的一个方面,提供了一种机械手指的控制方法,所述方法包括:
6、接收抓取指令;
7、根据抓取指令,控制近指节和/或远指节运动,以使得机械手指抓取到目标物体;
8、其中,在近指节未接触到目标物体且远指节接触到目标物体的情况下,近指节保持不动,远指节弯曲以包裹目标物体;在近指节和远指节均接触到目标物体的情况下,近指节配合远指节进行弯曲以抓取目标物体。
9、根据本申请的一个方面,提供了一种机械手指的控制装置,所述装置包括:
10、接收模块,用于接收抓取指令;
11、控制模块,用于根据抓取指令,控制近指节和/或远指节运动,以使得机械手指抓取到目标物体;
12、其中,在近指节未接触到目标物体且远指节接触到目标物体的情况下,近指节保持不动,远指节弯曲以包裹目标物体;在近指节和远指节均接触到目标物体的情况下,近指节配合远指节进行弯曲以抓取目标物体。
13、根据本申请的一个方面,提供了一种计算机设备,所述计算机设备包括处理器;
14、处理器,用于接收抓取指令;
15、根据抓取指令,控制近指节和/或远指节运动,以使得机械手指抓取到目标物体;
16、其中,在近指节未接触到目标物体且远指节接触到目标物体的情况下,近指节保持不动,远指节弯曲以包裹目标物体;在近指节和远指节均接触到目标物体的情况下,近指节配合远指节进行弯曲以抓取目标物体。
17、根据本申请的一个方面,提供了一种计算机可读存储介质,所述存储介质中存储有计算机程序,计算机程序用于被处理器执行,以实现如上所述的机械手指的控制方法。
18、根据本申请的一个方面,提供了一种芯片,所述芯片包括可编程逻辑电路和/或程序指令,当芯片运行时,用于实现如上所述的机械手指的控制方法。
19、根据本申请的一个方面,提供了一种计算机程序产品,所述计算机程序产品包括计算机指令,计算机指令存储在计算机可读存储介质中,处理器从计算机可读存储介质读取并执行计算机指令,以实现如上所述的机械手指的控制方法。
20、本申请实施例提供的技术方案带来的有益效果至少包括:
21、通过将近指节电机和远指节电机设置于基座中,实现了近指节和远指节的动力源后置,避免动力源占用近指节和远指节的空间,以使得近指节和远指节的尺寸趋于人手的实际尺寸,从而实现对机械手指的精密控制。
技术特征:
1.一种机械手指(100),其特征在于,所述机械手指(100)包括:近指节(10)、远指节(20)和基座(30);
2.根据权利要求1所述的机械手指(100),其特征在于,所述基座(30)中设置有近指节传动机构(12);
3.根据权利要求2所述的机械手指(100),其特征在于,所述近指节传动机构(12)包括:蜗杆(1211)、蜗轮(1221)和齿轮组(123);
4.根据权利要求3所述的机械手指(100),其特征在于,所述齿轮组(123)包括:第一齿轮(1231)、第二齿轮(1232)和扇形齿轮(1233);
5.根据权利要求1至4任一所述的机械手指(100),其特征在于,所述近指节(10)的内部设置有远指节传动机构(22);
6.根据权利要求5所述的机械手指(100),其特征在于,所述远指节传动机构(22)包括:弯曲传动组件(221)和张开传动组件(222);
7.根据权利要求6所述的机械手指(100),其特征在于,所述弯曲传动组件(221)包括:近端绳轮(231)、闭合绳索(232)、导向轮组(233)和远端绳轮(234);
8.根据权利要求7所述的机械手指(100),其特征在于,所述导向轮组(233)包括:第一导向轮(2331)和第二导向轮(2332);
9.根据权利要求8所述的机械手指(100),其特征在于,所述远指节传动机构(22)还包括:远指节电机座(25);
10.根据权利要求6所述的机械手指(100),其特征在于,所述张开传动组件(222)包括:张开绳索(241)和弹簧(242);
11.根据权利要求1至4任一所述的机械手指(100),其特征在于,所述近指节(10)还包括:近指节触觉传感器(13);
12.根据权利要求1至4任一所述的机械手指(100),其特征在于,所述远指节(20)还包括:远指节触觉传感器(26);
13.一种机械手指的控制方法,其特征在于,所述方法应用于如权利要求1至12任一所述的机械手指(100)中,所述方法包括:
14.根据权利要求13所述的方法,其特征在于,所述机械手指(100)还包括基座(30),近指节电机(11)和远指节电机(21)固定设置于所述基座(30)中,所述近指节(10)与所述近指节电机(11)传动连接,所述远指节(20)与所述远指节电机(21)传动连接;
15.根据权利要求14所述的方法,其特征在于,所述机械手指(100)还包括近指节传动机构(12)和远指节传动机构(22);
16.根据权利要求15所述的方法,其特征在于,所述近指节传动机构(12)包括:蜗杆(1211)、蜗轮(1221)和齿轮组(123),所述蜗杆(1211)与所述蜗轮(1221)啮合,所述蜗轮(1221)、所述齿轮组(123)和所述近指节(10)顺次固定连接;
17.根据权利要求15所述的方法,其特征在于,所述远指节传动机构(22)包括:弯曲传动组件(221)和张开传动组件(222),所述弯曲传动组件(221)包括:近端绳轮(231)、闭合绳索(232)、导向轮组(233)和远端绳轮(234),所述张开传动组件(222)包括:张开绳索(241)和弹簧(242),所述远端绳轮(234)和所述张开绳索(241)与所述远指节(20)固定连接;
18.根据权利要求14所述的方法,其特征在于,所述机械手指(100)还包括近指节传动机构(12)和远指节传动机构(22);
19.根据权利要求18所述的方法,其特征在于,所述近指节传动机构(12)包括:蜗杆(1211)、蜗轮(1221)和齿轮组(123),所述齿轮组(123)包括:第一齿轮(1231)、第二齿轮(1232)和扇形齿轮(1233),所述蜗杆(1211)与所述蜗轮(1221)啮合,所述蜗轮(1221)和所述第一齿轮(1231)固定,所述第一齿轮(1231)、所述第二齿轮(1232)和所述扇形齿轮(1233)顺次啮合,所述扇形齿轮(1233)固定于所述近指节(10)的内侧;
20.根据权利要求13至19任一所述的方法,其特征在于,所述近指节(10)外部朝向弯曲的一面铺设有近指节触觉传感器(13),和/或,所述远指节(20)外部朝向弯曲的一面铺设有远指节触觉传感器(26),所述方法还包括:
21.一种机械手指的控制装置,其特征在于,所述装置包括:
22.一种计算机设备,其特征在于,所述计算机设备包括处理器;
23.一种计算机可读存储介质,其特征在于,所述存储介质中存储有计算机程序,所述计算机程序用于被处理器执行,以实现如权利要求13至20中任一项所述的机械手指的控制方法。
24.一种芯片,其特征在于,所述芯片包括可编程逻辑电路和/或程序指令,当所述芯片运行时,用于实现如权利要求13至20中任一项所述的机械手指的控制方法。
25.一种计算机程序产品,其特征在于,所述计算机程序产品包括计算机指令,所述计算机指令存储在计算机可读存储介质中,处理器从所述计算机可读存储介质读取并执行所述计算机指令,以实现如权利要求13至20中任一项所述的机械手指的控制方法。
技术总结
本申请公开了一种机械手指、机械手指的控制方法、装置、设备及介质,涉及机器人领域。所述机械手指100包括:近指节10、远指节20和基座30;近指节10的底部与基座30的顶部活动连接,远指节20的底部活动套接于近指节10的顶部;近指节电机11和远指节电机21固定设置于基座30中,近指节10与近指节电机11传动连接,远指节20与远指节电机21传动连接。本实施例通过将近指节电机11和远指节电机21设置于基座30中,以使得近指节10和远指节20的尺寸趋于人手的实际尺寸,从而实现对机械手指100的精密控制。
技术研发人员:杨思成,黎雄,来杰,李望维,王睿,张正友
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!