一种管类检测工业机器人的制作方法
1.本发明属于工业机器人,尤其是一种管类检测工业机器人。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
3.而现有的工业机器人在对管类物品检测时,通常通过夹具进行完成对管类物品的夹持,进而再由视觉传感器进行完成对管道的检测工作,而由于夹具对物品夹持时,管类物被夹具夹持处视觉传感器将无法进行检测,进而缺失检测区域,进而影响检测效果。
技术实现要素:
4.发明目的:提供一种管类检测工业机器人,以解决背景技术中所涉及的问题。
5.技术方案:一种管类检测工业机器人,包括:运料部,以及与所述运料部连接的检测部;所述运料部包括基础组件,以及设置在所述基础组件两端的夹持组件;所述夹持组件包括设置在所述基础组件上的滑动单元,以及安装在所述滑动单元上的外撑单元;所述外撑单元包括与所述滑动单元固定连接的夹持棒,安装在所述夹持棒周部上的两组稳固件;每组稳固件包括设置在所述夹持棒周部上的外撑气缸,设置在所述外撑气缸输出端的外撑伸缩杆,以及与所述外撑伸缩杆连接的外撑块;通过在夹持组件设计外撑单元进行完成对管类的固定工作,通过将外撑单元延至管类物品内壁,通过外撑单元工作,由外撑块完成对管类的支撑工作,进而避免传统夹具由管类外壁上的夹持时,无法进行对夹持接触处的检测工作。
6.在进一步实施例中,所述基础组件包括运料支脚,安装在所述运料支脚上的运料架,以及安装在所述运料架上的运料滑轨;通过设计基础组件进行完成对滑动单元的支撑,通过运料支脚进行支撑运料架,进而再由运料架进行支撑滑动单元。
7.在进一步实施例中,所述滑动单元包括与所述运料架固定连接的滑动电机,设置在所述滑动电机输出端的滑动轴,与所述滑动轴连接的夹持丝杆,以及套接于所述夹持丝杆且与所述运料滑轨适配的夹持滑块;通过设计滑动单元进行完成带动外撑单元的移动,通过滑动电机驱动滑动轴转动,进而带动夹持丝杆转动,进而带夹持滑块进行沿着运料滑轨进行滑动,进而完成带动外撑单元的运动,进而是得两组外撑单元可以进行靠近、远离或者同向运动,进而完成对不同长度管类的夹持稳定工作。
8.在进一步实施例中,所述夹持棒固定安装在夹持滑块上,通过将夹持棒固定安装在夹持滑块上,当夹持滑块滑动时,可以带动夹持棒进行滑动,进而完成带动夹持棒的运动工作。
9.在进一步实施例中,所述检测部包括与所述运料架固定连接的检测柱,以及设置在所述检测柱上的检测传感器;通过设计检测传感器进行完成对监测柱的检测工作,进而完成工业机器人的检测需求。
10.在进一步实施例中,所述检测传感器为视觉传感器,通过视觉传感器可以完成对管类物品的尺寸或者损坏检测工作。
11.有益效果:本发明涉及一种管类检测工业机器人,本发明通过在夹持组件设计外撑单元进行完成对管类的固定工作,通过将外撑单元延至管类物品内壁,通过外撑单元工作,由外撑块完成对管类的支撑工作,进而避免传统夹具由管类外壁上的夹持时,无法进行对夹持接触处的检测工作。
附图说明
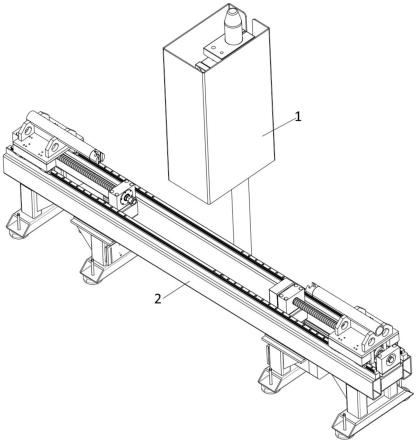
12.图1是本发明的结构示意图。
13.图2是本发明的夹持机构结构意图。
14.图3是本发明的外撑单元结构意图。。
15.附图标记为:检测部1、运料部2、运料架211、运料滑轨212、运料支脚213、夹持滑块221、夹持丝杆222、外撑单元223、夹持棒2231、外撑气缸2232、外撑伸缩杆2233、外撑块2234。
具体实施方式
16.本发明通过一种管类检测工业机器人,实现对管类物品的检测工作。下面通过实施例,并结合附图对本方案做进一步具体说明。
17.一种管类检测工业机器人包括:运料部2,以及与所述运料部2连接的检测部1;所述运料部2包括基础组件,以及设置在所述基础组件两端的夹持组件;所述基础组件包括运料支脚213,安装在所述运料支脚213上的运料架211,以及安装在所述运料架211上的运料滑轨212。
18.所述夹持组件包括设置在所述基础组件上的滑动单元,以及安装在所述滑动单元上的外撑单元223;所述滑动单元包括与所述运料架211固定连接的滑动电机,设置在所述滑动电机输出端的滑动轴,与所述滑动轴连接的夹持丝杆222,以及套接于所述夹持丝杆222且与所述运料滑轨212适配的夹持滑块221。
19.所述外撑单元223包括与所述滑动单元固定连接的夹持棒2231,安装在所述夹持棒2231周部上的两组稳固件;每组稳固件包括设置在所述夹持棒2231周部上的外撑气缸2232,设置在所述外撑气缸2232输出端的外撑伸缩杆2233,以及与所述外撑伸缩杆2233连接的外撑块2234;通过在夹持组件设计外撑单元223进行完成对管类的固定工作,通过将外撑单元
223延至管类物品内壁,通过外撑单元223工作,由外撑块2234完成对管类的支撑工作,进而避免传统夹具由管类外壁上的夹持时,无法进行对夹持接触处的检测工作;所述夹持棒2231固定安装在夹持滑块221上。
20.所述检测部1包括与所述运料架211固定连接的检测柱,以及设置在所述检测柱上的检测传感器。
21.所述检测传感器为视觉传感器。
22.工作原理说明:由操作人员将管类物品放置在夹持棒2231上,滑动电机带动滑动轴转动,进而带动滑动丝杆转动,进而带动夹持滑块221进行移动,进而带动夹持棒2231进行移动,当两组夹持棒2231调整好位置后,此时两组夹持棒2231均位于管类物品内部,此时再由外撑气缸2232带动外撑伸缩杆2233进行伸缩,进而带动外撑块2234进行抵住管类物品内壁,进而完成稳固工作,当管类物品夹持完成后,由视觉传感器完成对管类物品的检测工作。
23.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。
24.为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
技术特征:
1.一种管类检测工业机器人,包括:运料部,以及与所述运料部连接的检测部;所述运料部包括基础组件,以及设置在所述基础组件两端的夹持组件;所述夹持组件包括设置在所述基础组件上的滑动单元,以及安装在所述滑动单元上的外撑单元;其特征在于,所述外撑单元包括与所述滑动单元固定连接的夹持棒,安装在所述夹持棒周部上的两组稳固件;每组稳固件包括设置在所述夹持棒周部上的外撑气缸,设置在所述外撑气缸输出端的外撑伸缩杆,以及与所述外撑伸缩杆连接的外撑块。2.根据权利要求1所述的一种管类检测工业机器人,其特征在于,所述基础组件包括运料支脚,安装在所述运料支脚上的运料架,以及安装在所述运料架上的运料滑轨。3.根据权利要求2所述的一种管类检测工业机器人,其特征在于,所述滑动单元包括与所述运料架固定连接的滑动电机,设置在所述滑动电机输出端的滑动轴,与所述滑动轴连接的夹持丝杆,以及套接于所述夹持丝杆且与所述运料滑轨适配的夹持滑块。4.根据权利要求1所述的一种管类检测工业机器人,其特征在于,所述夹持棒固定安装在夹持滑块上。5.根据权利要求2所述的一种管类检测工业机器人,其特征在于,所述检测部包括与所述运料架固定连接的检测柱,以及设置在所述检测柱上的检测传感器。6.根据权利要求5所述的一种管类检测工业机器人,其特征在于,所述检测传感器为视觉传感器。
技术总结
本发明公开了一种管类检测工业机器人包括:运料部,以及与所述运料部连接的检测部;所述运料部包括基础组件,以及设置在所述基础组件两端的夹持组件;所述夹持组件包括设置在所述基础组件上的滑动单元,以及安装在所述滑动单元上的外撑单元;所述外撑单元包括与所述滑动单元固定连接的夹持棒,安装在所述夹持棒周部上的两组稳固件。本发明通过在夹持组件设计外撑单元进行完成对管类的固定工作,通过将外撑单元延至管类物品内壁,通过外撑单元工作,由外撑块完成对管类的支撑工作,进而避免传统夹具由管类外壁上的夹持时,无法进行对夹持接触处的检测工作。触处的检测工作。触处的检测工作。
技术研发人员:范静 蒋志斌 崔浩
受保护的技术使用者:南京禹智智能科技有限公司
技术研发日:2022.04.13
技术公布日:2022/7/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1