机械臂的触觉控制系统、方法、机械臂、机器人及芯片与流程
本申请属于机械臂,尤其涉及一种机械臂的触觉控制系统、方法、机械臂、机器人及芯片。
背景技术:
1、目前机械臂技术主要是通过驱动机械臂相应关节的运动,使机械臂末端到达指定的位置和/或姿态,以便基于安装在机械臂末端法兰处的末端工具执行所需操作。
2、经本申请发明人研究发现,在机械臂的运动控制场景下,会存在针对机械臂的关节进行运动控制的需求,比如当机械臂的大臂连杆在机械臂运动过程中碰撞到某一物体,此时需要驱动对应关节以使大臂连杆尽快远离该物体。
3、虽然目前可以直接拖动关节转动,但是由于机械臂自身的负重,该拖动过程需要操作人员施加较大的力,十分费力。
技术实现思路
1、本申请实施例提供一种机械臂的触觉控制系统、方法、机械臂、机器人及芯片,可实现用小力驱动关节转动的效果。
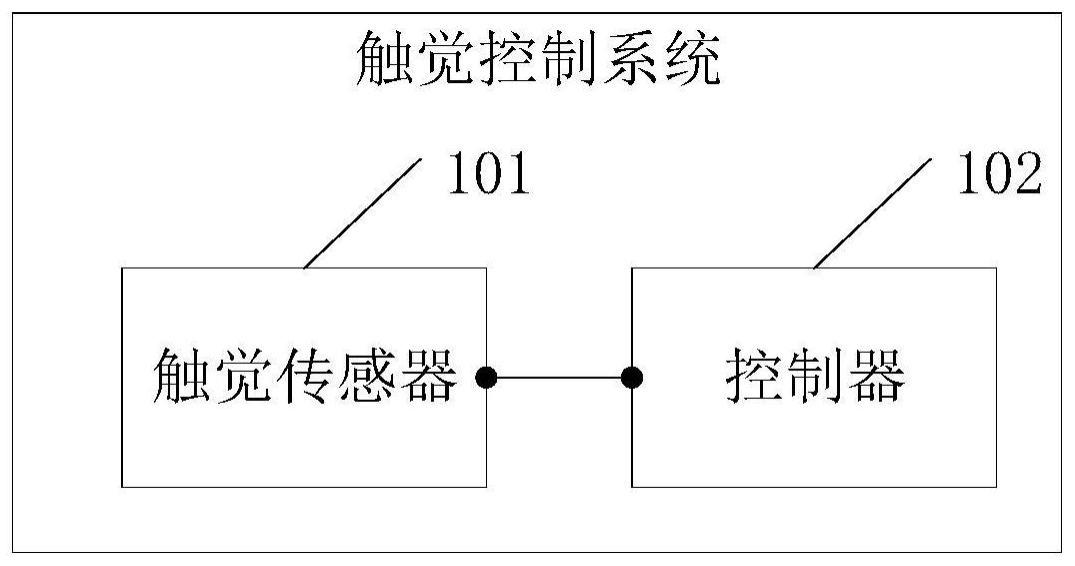
2、本申请第一方面提供一种机械臂的触觉控制系统,包括:
3、设置于机械臂的关节处的触觉传感器;
4、以及,与所述触觉传感器连接的控制器;
5、所述控制器配置有触觉控制功能,所述触觉控制功能包括:基于所述触觉传感器的感应信号驱动目标关节转动,所述目标关节为所述触觉传感器所在的关节。
6、基于本申请第一方面,在第一种可能的实现方式中,所述基于所述触觉传感器的感应信号驱动目标关节转动包括:
7、基于所述触觉传感器的感应信号确定运动参数,所述运动参数包括如下信息中的至少一个:转动方向和转动速度;
8、基于所述运动参数驱动目标关节转动。
9、基于本申请第一方面,在第二种可能的实现方式中,所述触觉控制系统配置有至少一种触控模式;
10、所述基于所述触觉传感器的感应信号驱动目标关节转动为:基于所述触觉传感器在触控模式下的感应信号驱动目标关节转动。
11、基于本申请第一方面的第二种可能的实现方式,在第三种可能的实现方式中,所述触控模式包括如下至少一种:寸动模式和连动模式;
12、在所述寸动模式下,所述基于所述触觉传感器的感应信号驱动目标关节转动包括:
13、基于所述触觉传感器的感应信号确定转动方向;驱动所述目标关节沿实时确定的转动方向转动预设角度;
14、在所述连动模式下,所述基于所述触觉传感器的感应信号驱动目标关节转动包括:
15、基于所述触觉传感器的感应信号确定转动方向;驱动所述目标关节沿实时确定的转动方向持续移动,直至所述触觉传感器的感应信号小于预设信号值。
16、基于本申请第一方面的第二种可能的实现方式,在第四种可能的实现方式中,基于触觉传感器在所述机械臂的关节处形成两个以上被区分的触觉感应区域。
17、基于本申请第一方面的第四种可能的实现方式,在第五种可能的实现方式中,所述触觉传感器的数量不小于2,且分布于不同平面上,以形成所述两个以上被区分的触觉感应区域。
18、基于本申请第一方面的第四种可能的实现方式,在第六种可能的实现方式中,对同一触觉传感器的触觉感应区域进行划分,以形成两个以上被区分的触觉感应区域。
19、基于本申请第一方面的第四种可能的实现方式,或者本申请第一方面的第五种可能的实现方式,或者本申请第一方面的第六种可能的实现方式,在第七种可能的实现方式中,所述触觉控制功能还包括:基于同一关节处同时产生感应信号的触觉感应区域数量,将所述机械臂的工作模式切换为相应的触觉控制模式。
20、本申请第二方面提供一种机械臂的触觉控制方法,该机械臂的至少一关节处设置有触觉传感器,该触觉控制方法包括:
21、将产生感应信号的触觉传感器所在关节确定为目标关节;
22、基于所述触觉传感器的感应信号驱动所述目标关节转动。
23、基于本申请第二方面,在第一种可能的实现方式中,所述基于所述触觉传感器的感应信号驱动所述目标关节转动包括:
24、基于所述触觉传感器的感应信号确定运动参数,所述运动参数包括如下信息中的至少一个:转动方向和转动速度;
25、基于所述运动参数驱动所述目标关节转动。
26、基于本申请第二方面,在第二种可能的实现方式中,所述触觉控制系统配置有至少一种触控模式;
27、所述基于所述触觉传感器的感应信号驱动目标关节转动为:基于所述触觉传感器在触控模式下的感应信号驱动目标关节转动。
28、基于本申请第二方面的第二种可能的实现方式,在第三种可能的实现方式中,所述触控模式包括如下至少一种:寸动模式和连动模式;
29、在所述寸动模式下,所述基于所述触觉传感器的感应信号驱动目标关节转动包括:
30、基于所述触觉传感器的感应信号确定转动方向;驱动所述目标关节沿实时确定的转动方向转动预设角度;
31、在所述连动模式下,所述基于所述触觉传感器的感应信号驱动目标关节转动包括:
32、基于所述触觉传感器的感应信号确定转动方向;驱动所述目标关节沿实时确定的转动方向持续移动,直至所述触觉传感器的感应信号小于预设信号值。
33、基于本申请第二方面的第二种可能的实现方式,在第四种可能的实现方式中,基于触觉传感器在所述目标关节处形成两个以上被区分的触觉感应区域;
34、所述触觉控制方法还包括:基于所述目标关节处产生感应信号的触觉感应区域的数量,将所述机械臂的工作模式切换为相应的触觉控制模式。
35、本申请第三方面提供一种机械臂,包括:设置于机械臂的关节处的触觉传感器、存储器及处理器,所述处理器用于读取并执行存储器中存储的计算机程序,以实现如第二方面或第二方面任一可能的实现方式所述方法的步骤。
36、本申请第四方面提供一种机器人,包括:如第三方面所述的机械臂。
37、本申请第五方面提供一种芯片,包括处理器,所述处理器用于读取并执行存储器中存储的计算机程序,以实现如第二方面或第二方面任一可能的实现方式涉及的步骤。
38、由上可见,本申请中将触觉传感器设置于机械臂的关节处,并基于触觉传感器的感应信号,驱动目标关节(即该触觉传感器所在的关节)转动,基于触觉传感器的原理,设置于关节处的触觉传感器是在该关节的表面被接触时产生感应信号,故操作人员只需要以触摸关节的方式使对应的触觉传感器产生的感应信号,即可实现对该关节的转动控制,进而实现用小力驱动关节转动的效果。
技术特征:
1.一种机械臂的触觉控制系统,其特征在于,包括:
2.根据权利要求1所述的触觉控制系统,其特征在于,所述基于所述触觉传感器的感应信号驱动目标关节转动包括:
3.根据权利要求1所述的触觉控制系统,其特征在于,所述触觉控制系统配置有至少一种触控模式;
4.根据权利要求3所述的触觉控制系统,其特征在于,所述触控模式包括如下至少一种:寸动模式和连动模式;
5.根据权利要求3所述的触觉控制系统,其特征在于,基于触觉传感器在所述机械臂的关节处形成两个以上被区分的触觉感应区域。
6.根据权利要求5所述的触觉控制系统,其特征在于,所述触觉传感器的数量不小于2,且分布于不同平面上,以形成所述两个以上被区分的触觉感应区域。
7.根据权利要求5所述的触觉控制系统,其特征在于,对同一触觉传感器的触觉感应区域进行划分,以形成两个以上被区分的触觉感应区域。
8.根据权利要求5-7任一项所述的触觉控制系统,其特征在于,所述触觉控制功能还包括:基于同一关节处同时产生感应信号的触觉感应区域数量,将所述机械臂的工作模式切换为相应的触觉控制模式。
9.一种机械臂的触觉控制方法,其特征在于,所述机械臂的至少一关节处设置有触觉传感器,所述触觉控制方法包括:
10.根据权利要求9所述的触觉控制方法,其特征在于,所述基于所述触觉传感器的感应信号驱动所述目标关节转动包括:
11.根据权利要求9所述的触觉控制方法,其特征在于,所述触觉控制系统配置有至少一种触控模式;
12.根据权利要求11所述的触觉控制方法,其特征在于,所述触控模式包括如下至少一种:寸动模式和连动模式;
13.根据权利要求11所述的触觉控制方法,其特征在于,基于触觉传感器在所述目标关节处形成两个以上被区分的触觉感应区域;
14.一种机械臂,包括:设置于机械臂的关节处的触觉传感器、存储器及处理器,所述处理器用于读取并执行存储器中存储的计算机程序,以实现如权利要求9-13任意一项所述方法的步骤。
15.一种机器人,包括:如权利要求14所述的机械臂。
16.一种芯片,包括处理器,所述处理器用于读取并执行存储器中存储的计算机程序,以实现如权利要求9-13任意一项所述方法的步骤。
技术总结
本申请属于机械臂技术领域,涉及一种机械臂的触觉控制系统、方法、机械臂、机器人及芯片,其中,该触觉控制系统包括设置于机械臂的关节处的触觉传感器;以及,与所述触觉传感器连接的控制器;所述控制器配置有触觉控制功能,所述触觉控制功能包括:基于所述触觉传感器的感应信号驱动目标关节转动,所述目标关节为所述触觉传感器所在的关节。本申请提供的技术方案可实现用小力驱动关节转动的效果。
技术研发人员:赵丹,黄睿,郎需林,姜宇
受保护的技术使用者:深圳市越疆科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!