一种保管箱的自动开锁机械臂及开锁系统的制作方法
1.本技术涉及保管箱技术领域,具体涉及一种保管箱的自动开锁机械臂及开锁系统。
背景技术:
2.保管箱是银行的传统业务,业务特点是在银行经营场所,以出租箱体的方式,代客户保管贵重物品。传统的机械式保管箱通常是1万-5万箱体组合在一起,每个箱体有2把钥匙,其中a钥匙由银行保管,b钥匙在客户租用箱体时配给客户使用。客户需要开箱时,需要银行人员先使用a钥匙打开主锁,再由客户用b钥匙打开b锁,才可以使用保管箱。客户使用完后,用b锁锁上箱体时,ab两个锁会同时锁上。
3.因安全原因,银行保管的a钥匙有1把,a钥匙可以打开所有的保管箱,但是b钥匙是一个保管箱有一个。
4.由于a锁的钥匙只有一个,因此,每次需要工作人员去客户需要打开的保管箱处来打开,效率低,而且浪费人力。
技术实现要素:
5.有鉴于此,本技术提供一种保管箱的自动开锁机械臂及开锁系统,能够自动打开保管箱的a锁,提高效率,节省工作人员。
6.本发明提供一种保管箱的自动开锁机械臂,包括:第一液压机械臂、第二液压机械臂和钥匙套筒;
7.所述第二液压机械臂套设于所述第一液压机械臂的内部;
8.所述第二液压机械臂远离所述第一液压机械臂的一端连接所述钥匙套筒;
9.所述钥匙套筒内装设钥匙;
10.所述钥匙套筒,用于在马达作用下转动来带动所述钥匙运动至保管箱的钥匙孔,所述钥匙套筒带动所述钥匙转动打开所述保管箱。
11.优选地,所述钥匙套筒内包括螺纹;
12.所述钥匙套筒在所述马达作用下转动时,所述螺纹跟随转动推动所述钥匙运动至所述保管箱的钥匙孔。
13.优选地,所述钥匙上套有叶轮;
14.所述螺纹转动时,所述叶轮在所述螺纹的推动下带动钥匙运动。
15.优选地,还包括:控制器;
16.所述控制器,用于在所述钥匙无法继续向前移动时,判断所述钥匙对准所述保管箱的钥匙孔,控制钥匙套筒带动所述钥匙顺时针转动进行开锁。
17.优选地,所述控制器,还用于在所述钥匙无法转动时,控制马达逆向转动,带动所述钥匙收回。
18.优选地,所述控制器,还用于判断所述钥匙收到原始位置时,向所述机械臂发出指
令,以使所述机械臂向上收回。
19.本技术提供一种开锁系统,包括:智能滑轨设备和智能平台;所述智能滑轨设备包括:滑轨设备和以上的机械臂;所述智能平台预存所有保管箱的编号和对应的位置信息;所述位置信息包括水平位置信息和垂直位置信息;
20.所述智能平台,用于接收用户输入的待打开保管箱的编号,根据所述编号获得所述待打开保管箱的水平位置信息和垂直位置信息,将所述待打开保管箱的水平位置信息和垂直位置信息均发送给所述控制器;
21.所述滑轨设备吊装于保管区域的上方;
22.所述滑轨设备移动至所述水平位置信息对应的水平位置和所述垂直位置信息对应的垂直位置。
23.优选地,所述滑轨设备包括:滑轨、金属探针和滑轨轮;
24.所述金属探针设置在所述滑轨的轨道两侧,且与所述滑轨接触,所述滑轨为金属材质,所述金属探针与电源接通;
25.所述轨道的两侧与保管箱的水平位置相对应的位置贴有绝缘贴纸;
26.当所述滑轨轮带动滑轨在轨道上运行时,所述金属探针运行到绝缘贴纸时电源切断,所述控制器对水平位置进行计数,直至控制器计数到所述待打开保管箱的水位位置,则控制所述滑轨轮停止运行;
27.所述控制器,用于控制所述机械臂伸出到所述待打开保管箱的垂直位置进行开锁。
28.优选地,所述金属探针包括:在所述轨道的两侧平行设置的粗金属探针和细金属探针;
29.所述绝缘贴纸包括:绝缘粗贴纸和绝缘细贴纸;
30.所述粗金属探针成对分别设置在所述滑轨的轨道两侧,且与所述滑轨接触,所述粗金属探针与电源接通;
31.所述细金属探针成对分别设置在所述滑轨的轨道两侧,且与所述滑轨接触,所述粗金属探针与电源接通;
32.所述轨道的两侧与保管箱的水平位置相对应的位置贴有所述绝缘粗贴纸;
33.所述轨道的两侧与保管箱的水平位置且与保管箱的钥匙孔相对应位置贴有所述绝缘细贴纸;
34.所述控制器,具体用于在所述粗金属探针被所述绝缘粗贴纸切断电源时,控制所述滑轨轮降低速度,通过所述细金属探针和所述绝缘细贴纸定位所述待打开保管箱的钥匙孔的水平位置。
35.优选地,所述智能滑轨设备还包括:磁吸夹持部件;
36.所述控制器,还用于在所述机械臂对准钥匙孔时,控制所述滑轨轮进入锁止状态,控制所述磁吸夹持部件夹住所述滑轨。
37.由此可见,本技术实施例具有如下有益效果:
38.本技术提供的保管箱的自动开锁机械臂,机械臂携带钥匙套筒,钥匙套筒内部设有钥匙,当机械臂运行到待打开的保险箱时,钥匙套筒对准钥匙孔,机械臂的马达可以带动钥匙套筒转动,钥匙套筒内部的钥匙被推出,当不能再推出时,说明钥匙已经完全插入钥匙
孔,因此,钥匙套筒带动钥匙转动,进而打开保管箱。本技术提供的自动开锁机械臂,不但可以自动实现开锁,而且在不开锁时,钥匙隐藏在钥匙套筒内部,机械臂吊装在天花板上,工作人员以及客户都无法开到,因此,可以防止钥匙被复制,从而提高安全性。
附图说明
39.图1为本技术实施例提供的一种机械臂的示意图;
40.图2为本技术实施例提供的一列保管箱的示意图;
41.图3为图1对应的侧视图;开锁系统中滑轨设备的截面图;
42.图4为本技术实施例提供的一种钥匙和叶轮的装配图;
43.图5为本技术实施例提供的再一种钥匙套筒的剖视图;
44.图6本技术实施例提供的一种保管箱的开锁系统的示意图。
具体实施方式
45.为了使本领域技术人员更好地理解本技术提供的技术方案,下面先介绍具体的应用场景。
46.本发明主要是在保留保管箱的机械锁的前提下,打开保管箱的a锁,但是由于保管箱一般包括很多台,例如一个保管区域可能上万甚至几万个保管箱,由银行管理岗人员来到待打开保管箱处,利用a钥匙打开保管箱,成本高,效率低,而且可能存在安全风险。
47.本技术实施例为了解决以上的技术问题,达到节省人力,提高开a锁的效率的目的,该开锁机械臂可以实现自动开锁,不需要工作人员到达待打开保管箱处。而且本技术提供的自动开锁机械臂内部携带钥匙,不开锁时,钥匙隐藏在机械臂内部,可以防止被复制。
48.下面结合附图详细介绍本技术提供的技术方案的实现方式。
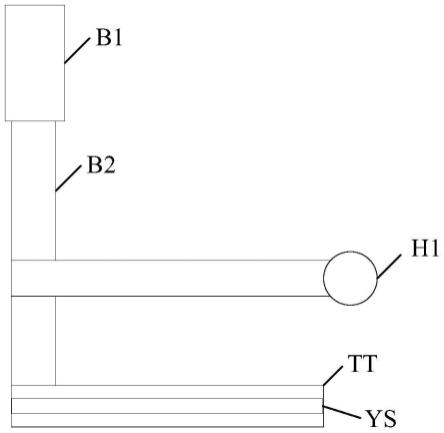
49.参见图1,该图为本技术实施例提供的一种机械臂的示意图。
50.本实施例提供的保管箱的自动开锁机械臂,包括:第一液压机械臂b1、第二液压机械臂b2和钥匙套筒tt;
51.第二液压机械臂b2套设于所述第一液压机械臂b1的内部;
52.第二液压机械臂b2远离所述第一液压机械臂b1的一端连接所述钥匙套筒tt;
53.钥匙套筒tt内装设钥匙ys;
54.另外,还包括机械臂滑轮h1,机械臂滑轮h1装设于所述液压第二臂b2的臂头;
55.钥匙套筒tt,用于在马达作用下转动来带动钥匙ys运动至保管箱的钥匙孔,钥匙套筒tt带动所述钥匙ys转动打开保管箱。
56.控制器(图中未示出),具体用于控制液压第一臂b1和液压第二臂b2的长度来控制机械臂的垂直长度,以使机械臂按照待打开保管箱的垂直位置对准钥匙孔。
57.本技术实施例提供的自动开锁机械臂,机械臂携带钥匙套筒,钥匙套筒内部设有钥匙,当机械臂运行到待打开的保险箱时,钥匙套筒对准钥匙孔,机械臂的马达可以带动钥匙套筒转动,钥匙套筒内部的钥匙被推出,当不能再推出时,说明钥匙已经完全插入钥匙孔,因此,钥匙套筒带动钥匙转动,进而打开保管箱。本技术提供的自动开锁机械臂,不但可以自动实现开锁,而且在不开锁时,钥匙隐藏在钥匙套筒内部,机械臂吊装在天花板上,工作人员以及客户都无法开到,因此,可以防止钥匙被复制,从而提高安全性。
58.为了更好地理解本技术提供的机械臂,下面结合保管箱进行介绍。
59.参见图2,该图为本技术提供的一列保管箱的示意图。
60.图2中仅示意了4个保管箱,分别编号为1-4,每个保管箱对应一个滑轮定位口,每个保管箱包括一个钥匙孔。
61.每列保管箱中的每个保管箱设有滑轮定位口;
62.机械臂滑轮卡入所述滑轮定位口时,机械臂对准所述钥匙孔,所述控制器控制机械臂停止下降。
63.具体地,机械臂从上往下,沿着v型凹槽下压移动,通过机械臂滑轮定位。
64.机械臂滑轮到达滑轮定位口,因为定位口比v型凹槽深,因为弹簧原因滑轮伸出,滑轮内弹簧片触点脱离,得到计数。
65.按照待打开保管箱的位置,例如第3个保管箱,则到达第3个定位口后,机械臂在固定位置停住。
66.机械臂套筒此时刚好停留在对准钥匙孔位置。
67.机械臂内钥匙伸出,插入钥匙孔内,由马达转动带动钥匙打开保管箱a钥匙。
68.参见图3,该图为本技术实施例提供的一种机械臂开保管箱的配合示意图。
69.当机械臂到达保管箱k的钥匙孔k位置后,机械臂滑轮h1的定位口触点脱离,控制器发出插入钥匙及开锁指令。
70.机械臂寻址滚轮会到达保管箱k的垂直定位口,钥匙套筒tt刚好对准需要打开的保管箱k的钥匙孔k,突出机械部分。
71.下面结合附图4和图5来说明钥匙是如何运行开锁的。
72.参见图4,该图为本技术实施例提供的一种钥匙和叶轮的装配图。
73.参见图5,该图为本技术实施例提供的再一种钥匙套筒的剖视图。
74.钥匙套筒tt内包括螺纹lw;
75.所述钥匙套筒tt在所述马达作用下转动时,所述螺纹lw跟随转动推动所述钥匙ys运动至所述保管箱的钥匙孔。
76.钥匙ys上套有叶轮yl;
77.所述螺纹lw转动时,所述叶轮yl在所述螺纹lw的推动下带动钥匙ys运动。
78.所述控制器,用于在所述钥匙ys无法继续向前移动时,判断所述钥匙ys对准所述保管箱的钥匙孔,控制钥匙套筒tt带动所述钥匙ys顺时针转动进行开锁。
79.控制器,还用于在钥匙ys无法转动时,控制马达逆向转动,带动钥匙ys收回。
80.控制器,还用于判断钥匙ys收到原始位置时,向所述机械臂发出指令,以使所述机械臂向上收回。
81.下面详细介绍一种钥匙开锁的具体步骤。
82.a.收到插入开锁指令后,机械臂的马达带动钥匙套筒顺时针转动。
83.b.钥匙套筒内螺纹转动,通过叶轮,推动机械臂钥匙往前。
84.c.钥匙套筒接触到保管箱的钥匙孔时,如果对不准钥匙孔,因为物理作用力的原因,钥匙套筒会带动钥匙套筒内的钥匙在保管箱的钥匙孔处转动,直到钥匙转动到对准钥匙孔可以插入。
85.d.当钥匙插入钥匙孔后,因为钥匙套筒可以推动钥匙往前,继续推动钥匙完全插
入钥匙孔。
86.e.钥匙孔完全插入后,由于力学原因,钥匙无法继续向前,钥匙套筒开始带动钥匙顺时针转动。
87.f.例如,钥匙完全转动90度后,完成开锁动作,此时钥匙完全锁死,既不能向前移动,也不能转动。
88.g.马达无法转动后,收到指令,开始逆向转动,带动钥匙回缩。
89.h.当钥匙回缩到原始位置,发出指令,通知机械臂上收。
90.i.机械臂完全回收后,智能滑轨设备回到原始位置。
91.基于以上实施例提供的一种保管箱的自动开锁机械臂,本技术还提供一种开锁系统。下面结合附图进行详细介绍。
92.参见图6,该图为本技术实施例提供的一种开锁系统的示意图。
93.本实施例提供的开锁系统,包括:智能滑轨设备和智能平台;所述智能滑轨设备包括:滑轨设备和以上实施例介绍的自动开锁机械臂;智能平台预存所有保管箱的编号和对应的位置信息;位置信息包括水平位置信息和垂直位置信息;
94.本实施例提供的保管箱的开锁系统,包括:智能平台100和智能滑轨设备200;
95.所述智能滑轨设备200包括:滑轨设备201、控制器203和机械臂202;
96.所述智能平台100预存所有保管箱的编号和对应的位置信息;所述位置信息包括水平位置信息和垂直位置信息;
97.所述智能平台100,用于接收用户输入的待打开保管箱的编号,根据所述编号获得所述待打开保管箱的水平位置信息和垂直位置信息,将所述待打开保管箱的水平位置信息和垂直位置信息均发送给所述控制器203;
98.所述滑轨设备201吊装于保管区域的上方;例如,一般滑轨设备201吊装于天花板上,带有轨道,可以沿着一定的路线移动。
99.所述控制器203,用于根据控制所述滑轨设备201移动至所述水平位置信息对应的水平位置和所述垂直位置信息对应的垂直位置,控制所述机械臂202对准所述待打开保管箱的钥匙孔打开所述保管箱。
100.因为机械式保管箱是矩阵式排列,彼此相隔一定的位置(类似图书馆的书架),所以需要预先在智能平台100上记录每个保管箱的水平位置信息和垂直位置信息。例如,每列可以包括10个保管箱,在垂直位置上可以通过计数获得对应的保管箱,例如10个保管箱,可以从上往下分别计数1-10,在客户租用保管箱时,会在智能平台100中,记录客户的保管箱的编号,每个编号对应有水平位置信息和垂直位置信息。客户需要打开保险箱时,在智能平台100输入客户需要打开的保管箱的编号即可获得保管箱的水平位置信息和垂直位置信息。
101.智能滑轨设备200在客户不使用时,可以位于滑轨端侧进行充电,等待工作状态。
102.智能平台100设有两个网卡,一个用于连接局域网,另一个用于连接内网。
103.智能滑轨设备200通过wifi接入所述内网,与所述智能平台通信。
104.本技术实施例不具体限定智能滑轨设备的具体实现方式,例如可以通过一些限位模块来对于保管箱进行水平位置的定位,利用计数器对于每列保管箱的定位。
105.本技术实施例提供的保管箱的开锁系统,包括:智能滑轨设备和智能平台;智能平
台预存所有保管箱的编号和对应的位置信息;位置信息包括水平位置信息和垂直位置信息;客户需要打开保管箱时,向智能平台输入保管箱的编号,智能平台根据编号获得待打开保管箱的水平位置信息和垂直位置信息,将待打开保管箱的水平位置信息和垂直位置信息均发送给控制器;控制器控制滑轨设备移动至水平位置信息对应的水平位置和垂直位置信息对应的垂直位置,控制机械臂对准待打开保管箱的钥匙孔打开保管箱。由于本技术提供的开锁系统可以自动打开客户需要打开的保管箱的a钥匙,因此,不需要工作人员来到保管箱处打开a锁,这样节省人力,提高开锁效率,并且提高安全性。
106.金属探针包括:在所述轨道的两侧平行设置的粗金属探针和细金属探针;
107.绝缘贴纸包括:绝缘粗贴纸和绝缘细贴纸;
108.粗金属探针成对分别设置在滑轨的轨道两侧,且与滑轨接触,粗金属探针与电源接通;
109.细金属探针成对分别设置在滑轨的轨道两侧,且与滑轨接触,粗金属探针与电源接通;
110.轨道的两侧与保管箱的水平位置相对应的位置贴有绝缘粗贴纸;
111.轨道的两侧与保管箱的水平位置且与保管箱的钥匙孔相对应位置贴有绝缘细贴纸;
112.控制器,具体用于在粗金属探针被绝缘粗贴纸切断电源时,控制滑轨轮降低速度,通过细金属探针和绝缘细贴纸定位待打开保管箱的钥匙孔的水平位置。
113.智能滑轨设备还包括:磁吸夹持部件;
114.控制器,还用于在机械臂对准钥匙孔时,控制滑轨轮进入锁止状态,控制磁吸夹持部件夹住滑轨,来保证稳定性。
115.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本技术。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的精神或范围的情况下,在其它实施例中实现。因此,本技术将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1