磁控仿生机器人及其控制方法
1.本发明涉及机器人的技术领域,特别是涉及一种磁控仿生机器人及其控制方法。
背景技术:
2.为适应不同环境,机器人的运动模式会模仿复制生物的运动模式,如模仿蚯蚓、昆虫、蛇以改变身体的模式在不同应用场合进行应用。目前,模仿鱼类摆动运动的微型机器人已经广泛地应用至工业、医疗、环境治理等众多领域。这些仿鱼类微型机器人可以在外部能源(电场、光、磁场)的适当刺激下进行一系列类似鱼的运动。如bandyopadhyay等人用双向可逆变形的形状记忆金属模拟鱼的身体和尾鳍,在额定交流电刺激下产生类似鱼的摇摆运动。li等人将弹性介质体嵌入到由硅胶制成的鱼形机器人体内,在高压电刺激下响应变形,迫使柔性鱼鳍跟随变化产生波浪运动推动机器人前进。
3.但是,现有技术中采用记忆金属和/或弹性介质体的两类仿鱼型微型机器人的结构相对复杂、生产过程复杂且均需要有线控制,依靠电驱动,由于电驱动响应具有不确定性,因此无法精准对微机器人实施控制。有线控制及无法实现精准控制的缺点,严重地影响了仿鱼型微型机器人的应用场合。
4.随着磁控技术的发展,出现了磁场驱动的仿鱼型微机器人。但是,现有的磁控仿鱼型机器人难以真正实现模仿鱼类的摆动运动,仍然无法实现精准控制,且无法实现在有限制的环境或狭窄的通道中运动甚至转向。
5.因此,针对上述技术问题,有必要提供一种结构简单、能够提高控制精度且适应狭窄通道或限制环境的磁控仿生机器人及其控制方法。
技术实现要素:
6.有鉴于此,本发明实施例的目的在于提供一种磁控仿生机器人及其控制方法。本发明实施例所提供的磁控仿生机器人结构简单、能够提高控制精度且适应狭窄通道或限制环境。
7.为了实现上述目的,本发明一实施例提供的技术方案如下:一种磁控仿生机器人,包括:头部,所述头部具有磁性;尾部,所述尾部具有磁性,所述尾部的磁性方向与所述头部的磁性方向相反;杆部,所述杆部的一端连接所述头部,所述杆部的另一端连接所述尾部;所述杆部具有柔性和弹性;在磁场作用于所述磁控仿生机器人时,所述头部和所述尾部分别受到相应的磁场力,所述杆部产生弯曲变形与流体相互作用产生驱动力使所述磁控仿生机器人发生移动;在磁场不再作用于所述磁控仿生机器人时,所述杆部自动恢复至原始杆部状态。
8.作为本发明的进一步改进,所述头部的体积大于所述尾部的体积。
9.作为本发明的进一步改进,所述头部的重量重于所述尾部的重量。
10.作为本发明的进一步改进,所述头部呈圆柱状,所述尾部呈圆柱状。
11.作为本发明的进一步改进,所述头部的长度是所述尾部的长度的2倍至3倍。
12.作为本发明的进一步改进,所述杆部呈圆柱状,且所述杆部的直径小于所述头部的直径、所述杆部的直径小于所述尾部的直径。
13.作为本发明的进一步改进,所述头部的磁性强度为所述尾部的磁性强度的1.5倍至3倍。
14.本发明还提供一种磁控仿生机器人的运动控制方法。该控制方法包括步骤:将磁控仿生机器人放置在液态工作环境中;对所述工作环境的区域施加振荡磁场,所述振荡磁场的强度和方向周期性地变化;所述振荡磁场的强度先增大后减小地周期性变化,所述振荡磁场的方向以第一方向和第二方向交替地周期性变化,所述第一方向与所述第二方向的方向相反;所述磁控仿生机器人在所述振荡磁场的作用下,周期性地摆动与流体相互作用而发生移动。
15.作为本发明的进一步改进,所述振荡磁场的产生方式为将正弦交流电通入一组亥姆赫兹线圈中。
16.作为本发明的进一步改进,所述振荡磁场在每一时刻的磁场都是均匀本发明具有以下优点:
17.本发明实施例所提供的磁控仿生机器人包括头部、尾部和杆部,结构非常简单。进一步地,本发明实施例所提供的磁控仿生机器人头部和尾部分别具有磁性且磁性方向相反,连接尾部和头部的杆部具有弹性和柔性,可以有效地适应磁控仿生机器人的运动且在磁场消失的时候可自行恢复,有效地提高磁控仿生机器人的运动控制精度。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
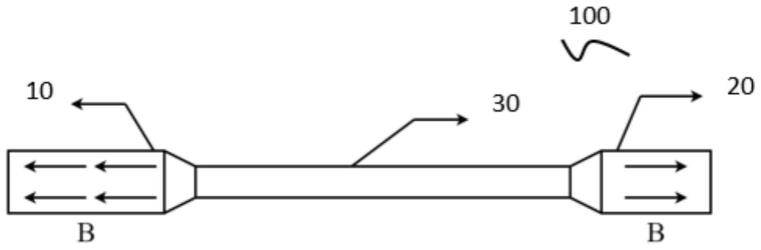
19.图1为本发明实施例提供的磁控仿生机器人的结构示意图;
20.图2(a)为本发明实施例提供的磁控仿生机器人在无磁场环境中的示意图;
21.图2(b)为本发明实施例提供的磁控仿生机器人在受到向右磁场环境中的示意图;
22.图2(c)为本发明实施例提供的磁控仿生机器人在受到向左磁场环境中的示意图;
23.图3为本发明实施例提供的磁控仿生机器人的控制方法流程示意图;
24.图4为本发明实施例所采用的振荡磁场变化示意图;
25.图5为图4所示实施例中的磁控仿生机器人在振荡磁场各个时间点的形变示意图。
26.附图中的标记说明:
27.100、磁控仿生机器人10、头部20、尾部
28.30、杆部
具体实施方式
29.为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通
技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
30.如图1所示,本发明第一实施例提供的磁控仿生机器人100的结构示意图。在该实施例中,磁控仿生机器人100包括头部10、尾部20和杆部30。头部10具有磁性,尾部20具有磁性,尾部20的磁性方向与头部10的磁性方向相反。杆部30的一端连接头部10,杆部30的另一端连接尾部20,杆部30具有柔性和弹性。在磁场作用于磁控仿生机器人100时,头部10和尾部20分别受到相应的磁场力,杆部30产生弯曲变形与流体相互作用产生驱动力使磁控仿生机器人100发生移动;在磁场不再作用于磁控仿生机器人100时,杆部30自动恢复至原始杆部状态。
31.磁控仿生机器人100的整体可以呈圆柱状、长条状或带状。头部10的体积大于尾部20的体积。头部10的材料与尾部20的材料一致,如钕铁硼、聚二甲基硅氧烷和固化剂以10:10:1的质量比的混合物。根据具体应用场景对磁控仿生机器人100的磁性的强度要求,具有磁性的钕铁硼的质量比重范围可设定在5至20。对应地,头部10的磁性强度为尾部20的磁性强度的1.5倍至3倍。头部10的重量重于尾部20的重量。优选地,头部10的长度是尾部20的长度的2倍至3倍。
32.杆部30的材料同时具有弹性和柔性,以适应磁控仿生机器人100在磁场中运动。在一实施例中,杆部30的材料包括以质量比10:1混合的聚二甲基硅氧烷和固化剂,或者热固化胶材料。
33.继续参考图1所示,在该实施例中,磁控仿生机器人100整体大致呈圆柱状。在该实施例中,头部10呈圆柱状,尾部20呈圆柱状,杆部30也呈圆柱状。杆部30的直径小于头部10的直径、杆部30的直径小于尾部20的直径。在一具体实施例中,头部10的直径为1毫米、长度3毫米,尾部20的直径1毫米、长度1毫米,杆部30的直径为0.6毫米、长度8毫米。
34.如图2(a)所示,本发明实施例提供的磁控仿生机器人100在无磁场环境中的示意图;如图2(b)所示,本发明实施例提供的磁控仿生机器人100在受到向右磁场环境中的示意图;如图2(c)所示,本发明实施例提供的磁控仿生机器人100在受到向左磁场环境中的示意图。基于磁控仿生机器人100的结构设计,磁控仿生机器人100在振荡磁场的驱动下可以在液态环境中实现模仿鱼“c”型摆动运动。在振荡磁场中,磁控仿生机器人100的头部10和尾部20受到磁转矩的作用产生同频同向的交替摆动,磁控仿生机器人100的杆状30不断交替弯曲成“c”型。同时,由于头部10和尾部20的磁性强度大小不同,故在磁场中受到的磁转矩不同,头部10磁性较强,受到的磁转矩较大,故而摆动的幅度也就较大。相比较磁控仿生机器人100的尾部20由于磁性较小,引起的尾部20摆动也就较小。类似鱼游动的原理,前后摆动幅度差异与液态环境相互作用形成涡流,产生向前的驱动力使磁控仿生机器人100像鱼一样以摆动的形式运动起来。
35.本发明实施例所提供的磁控仿生机器人包括头部、尾部和杆部,结构非常简单。进一步地,本发明实施例所提供的磁控仿生机器人头部和尾部分别具有磁性且磁性方向相反,连接尾部和头部的杆部具有弹性和柔性,可以有效地适应磁控仿生机器人的运动且在磁场消失的时候可自行恢复,有效地提高磁控仿生机器人的运动控制精度。
36.如图3所示,本发明实施例提供的磁控仿生机器人的控制方法流程示意图。在该实施例中,一种磁控仿生机器人的运动控制方法包括三个步骤,每个步骤的具体内容,如下所
述。
37.步骤s1、将磁控仿生机器人放置在液态工作环境中。
38.步骤s2、对所述工作环境的区域施加振荡磁场,所述振荡磁场的强度和方向周期性地变化;所述振荡磁场的强度先增大后减小地周期性变化,所述振荡磁场的方向以第一方向和第二方向交替地周期性变化,所述第一方向与所述第二方向的方向相反。
39.如图4所示,本发明实施例所采用的振荡磁场变化示意图。振荡磁场的产生方式为将正弦交流电通入一组亥姆赫兹线圈中。振荡磁场的方向和强度均呈现周期性变化。
40.步骤s3、磁控仿生机器人在所述振荡磁场的作用下,周期性地摆动与流体相互作用而发生移动。
41.如图5所示,本发明实施例中的磁控仿生机器人在振荡磁场各个时间点的受力示意图。当时间由t1至t5,振荡磁场所形成的磁场先正向减小,后反向增大再减小,最后正向增大。在这整个过程中,每一时刻对应形成的磁场均是均匀的,没有梯度。故在此磁场中,磁控仿生机器人只受到磁转矩的作用。初始,在t1时刻,磁场为零,磁控仿生机器人不受磁场任何作用呈现初始状态;t1-t2时刻,磁场向右逐渐增大到达峰值,磁控仿生机器人受到的磁转矩逐渐增大,向右摆动幅度越来越大,c型愈加明显。t2-t3时刻,磁场向右逐渐减小,从峰值减小为零。磁控仿生机器人受到的磁转矩逐渐减小,向右摆动幅度越来越小。在t3时刻,磁场为零,磁控仿生机器人又恢复初始状态;t3-t4时刻,磁场向左逐渐增大到达峰值,磁控仿生机器人受到的磁转矩逐渐增大,向左摆动幅度越来越大。t4-t5时刻,磁场向左逐渐减小,从峰值减小为零。磁控仿生机器人受到的磁转矩逐渐减小,向左摆动幅度摆动越来越小。t5时刻,磁场为零,磁控仿生机器人又恢复初始状态。周而复始,磁控仿生机器人产生周期式的交替运动,驱动磁控仿生机器人按照一定轨迹运动。
42.本发明实施例提供的控制方法通过对磁场的控制,实现磁控仿生机器人仿鱼“c”型摆动的运动,磁场驱动实现无缆运动,微机器人运动自由、无约束,磁控仿生机器人的运动可控且控制精度高。
43.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
44.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1