关节和机器人的制作方法
本发明属于机械设备相关,具体涉及一种关节和机器人。
背景技术:
1、随着机械自动化水平的不断进步,机器人的出现在生活和工作中。目前包括机器人在内的驱动关节设计,由于要考虑活动范围,特别是带有腿部零件的自旋、前摆或外摆关节,需要在运动范围内避开障碍零件。关节驱动一体化技术中,会设有高速或低速轴编码器,或者同时布置有高速与低速编码器,来进行位置精度控制。
2、但是,现有技术在使用低速编码器时,会出现走线混乱,以导致线路存在干扰关节正常使用的现象,用户体验不佳。
3、因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现思路
1、因此,本发明所要解决的技术问题是现有技术中的关节存在使用不方便的问题。
2、为解决上述技术问题,本发明提供一种关节。关节包括壳体,壳体具有容置腔;减速驱动件,减速驱动件的一部分安装在容置腔的内部,减速驱动件的输出端伸出到容置腔的外部;第一编码器,第一编码器设置在壳体的外部并与输出端连接,以检测输出端的转速。
3、可选地,减速驱动件包括驱动件,驱动件安装在容置腔的内部;减速器,减速器的输入端与驱动件的驱动轴的一端驱动连接,减速器的输出端伸出到容置腔的外部;关节还包括第二编码器,第二编码器容置在容置腔的内部并检测驱动轴的转速。
4、可选地,关节还包括传动组件,输出端与传动组件驱动连接,第一编码器的一部分安装在传动组件上,第一编码器通过传动组件检测输出端的转速。
5、可选地,传动组件包括转轴,输出端与转轴的第一端驱动连接,第一编码器的一部分安装在转轴的第二端上。
6、可选地,转轴与驱动轴平行设置。
7、可选地,传动组件还包括第一传动件,第一传动件设置在输出端上;第二传动件,第二传动件设置在转轴的第一端,第一传动件与第二传动件驱动连接。
8、可选地,第一传动件包括第一齿轮,第二传动件包括与第一齿轮啮合的第二齿轮,第一齿轮的齿径和齿数均大于第二齿轮,第一齿轮与第二齿轮件之间具有传动比,传动比大于等于1且小于等于4。
9、可选地,关节还包括支架,壳体的至少一部分伸入支架的内部,支架还包括用于容置转轴的通孔,转轴的第一端伸出至通孔的外侧并与输出端驱动连接;第一编码器包括信号连接的第一检测部和第一读取部,第一读取部安装在支架上,第一检测部安装转在转轴的第二端上。
10、可选地,关节还包括至少一个球轴承,转轴通过球轴承与通孔的内壁面连接。
11、可选地,减速器具有输出轴,输出轴具有驱动连接的连接段和输出段,连接段容置在容置腔的内部,输出段的一端与连接段连接,输出段的另一端为输出端,关节还包括第一安装轴承,第一安装轴承设置在壳体与连接段之间;第二安装轴承,第二安装轴承与第一安装轴承沿输出轴的轴向间隔设置,第二安装轴承设置在壳体与连接段之间。
12、可选地,关节还包括扭矩传感仪,扭矩传感仪安装在容置腔的内部,扭矩传感仪为具有过孔的环状结构,减速器具有输出轴,输出轴贯穿过孔并与过孔的孔壁活动连接。
13、可选地,壳体包括可拆卸地本体和盖板,盖板盖设在本体远离减速器的输出端的一端,盖板和本体围成安装空间,关节还包括固定盘,固定盘与在本体的内表面连接,固定盘将安装空间沿输出轴的轴向分隔为安装腔和容置腔,控制器,控制器安装在安装腔的内部,控制器与驱动件、减速器、第二编码器、第一编码器、扭矩传感仪电连接。
14、本发明还提供一种机器人,机器人包括上述的关节。
15、本发明提供的技术方案,具有以下优点:
16、本发明的关节包括壳体、减速驱动件和第一编码器,壳体具有容置腔,减速驱动件的一部分安装在容置腔的内部,减速驱动件的输出端伸出到容置腔的外部,第一编码器设置在壳体的外部并与输出端连接,以检测输出端的转速。
17、由上可知,第一编码器处于壳体的外部并与减速驱动件的输出端连接,以检测减速驱动件的输出端的转速,其中对减速驱动件的输出端位于壳体的外部区域,通过对处于壳体外部区域的输出端进行检测转速,以实时监控减速驱动件的转速,直接对输出端进行转速检测加强了检测的精准度,并且将第一编码器设置在壳体的外部区域不占用容置腔的空间,实现节省壳体的内部的容置腔的空间,同时第一编码器安装在壳体的外部,以使第一编码器与减速驱动件件的连接位置不受约束,提高了第一编码器的使用的通用性,也方便对第一编码器进行读取和拆装。
技术特征:
1.一种关节,其特征在于,包括:
2.根据权利要求1所述的关节,其特征在于,所述减速驱动件包括:
3.根据权利要求2所述的关节,其特征在于,所述关节还包括传动组件(700),所述输出端与所述传动组件(700)驱动连接,所述第一编码器(600)的一部分安装在所述传动组件(700)上,所述第一编码器(600)通过所述传动组件(700)检测所述输出端的转速。
4.根据权利要求3所述的关节,其特征在于,所述传动组件(700)包括转轴(701),所述输出端与所述转轴(701)的第一端驱动连接,所述第一编码器(600)的一部分安装在所述转轴(701)的第二端上。
5.根据权利要求4所述的关节,其特征在于,所述转轴(701)与所述驱动轴(301)平行设置。
6.根据权利要求4所述的关节,其特征在于,所述传动组件(700)还包括:
7.根据权利要求6所述的关节,其特征在于,所述第一传动件(702)包括第一齿轮,所述第二传动件(703)包括与所述第一齿轮啮合的第二齿轮,所述第一齿轮的齿径和齿数均大于所述第二齿轮,所述第一齿轮与所述第二齿轮件之间具有传动比,所述传动比大于等于1且小于等于4。
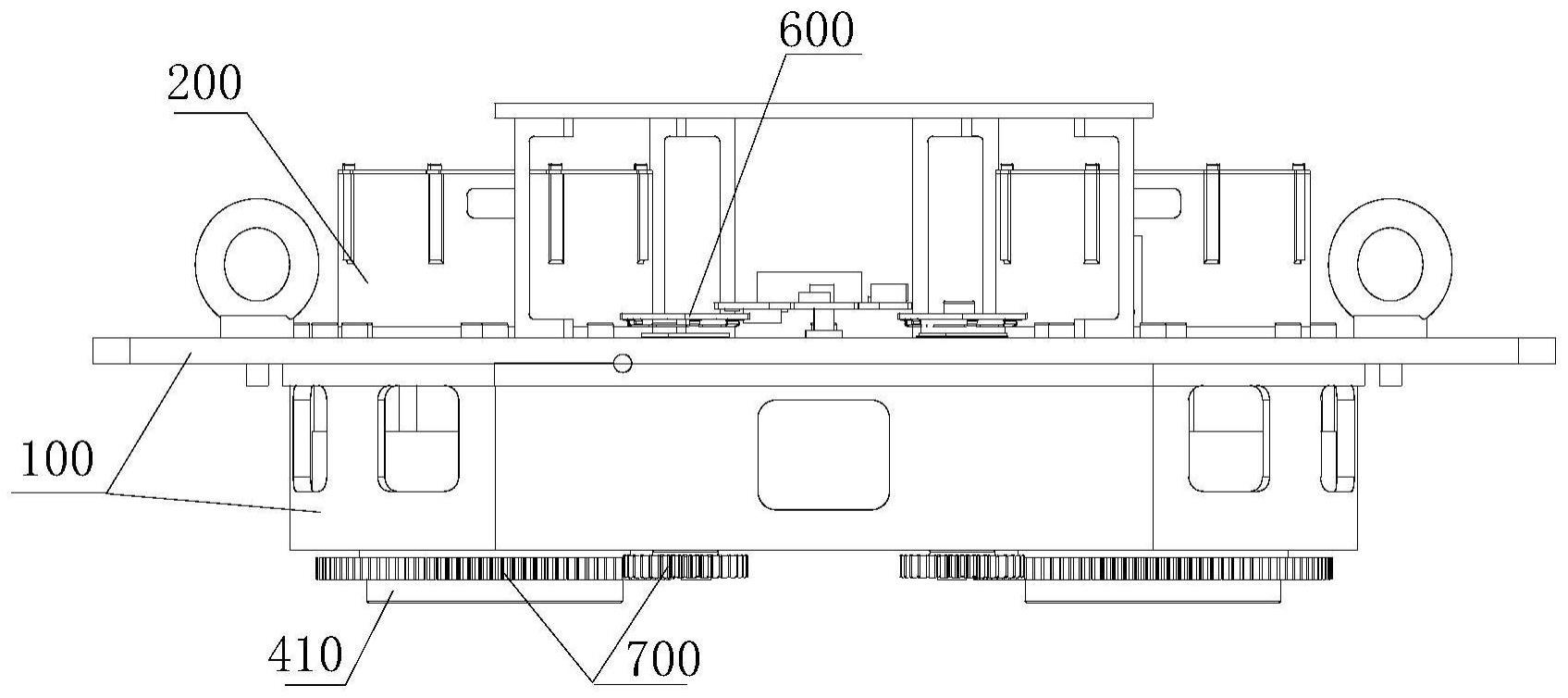
8.根据权利要求4所述的关节,其特征在于,所述关节还包括支架(100),所述壳体(200)的至少一部分伸入所述支架(100)的内部,所述支架(100)还包括用于容置所述转轴(701)的通孔(101),所述转轴(701)的第一端伸出至所述通孔(101)的外侧并与所述输出端驱动连接;所述第一编码器(600)包括信号连接的第一检测部(601)和第一读取部(602),所述第一读取部(602)安装在所述支架(100)上,所述第一检测部(601)安装转在所述转轴(701)的第二端上。
9.根据权利要求8所述的关节,其特征在于,所述关节还包括至少一个球轴承,所述转轴(701)通过所述球轴承与所述通孔(101)的内壁面连接。
10.根据权利要求2至9中任一项所述的关节,其特征在于,所述减速器(400)具有输出轴(410),所述输出轴(410)具有驱动连接的连接段(411)和输出段(412),所述连接段(411)容置在所述容置腔(230)的内部,所述输出段(412)的一端与所述连接段(411)连接,所述输出段(412)的另一端为所述输出端,所述关节还包括:
11.根据权利要求2至9中任一项所述的关节,其特征在于,所述关节还包括扭矩传感仪(900),所述扭矩传感仪(900)安装在所述容置腔(230)的内部,所述扭矩传感仪(900)为具有过孔的环状结构,所述减速器(400)具有输出轴(410),所述输出轴(410)贯穿所述过孔并与所述过孔的孔壁活动连接。
12.根据权利要求11所述的关节,其特征在于,所述壳体(200)包括可拆卸地本体(210)和盖板(220),所述盖板(220)盖设在所述本体(210)远离所述减速器(400)的输出端的一端,所述盖板(220)和所述本体(210)围成安装空间,所述关节还包括:
13.一种机器人,其特征在于,所述机器人包括权利要求1至12中任一项所述的关节。
技术总结
本发明公开一种关节,关节包括壳体,壳体具有容置腔;减速驱动件,减速驱动件的一部分安装在容置腔的内部,减速驱动件的输出端伸出到容置腔的外部;第一编码器,第一编码器设置在壳体的外部并与输出端连接,以检测输出端的转速;本发明还公开一种机器人,机器人包括关节。本发明公开的关节和机器人能够解决现有技术中关节存在使用不方便的问题。
技术研发人员:孙坤,包裕隆,曹俊亮,喻超
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!