视觉引导机器人进行三维无序抓取物体的装置及方法与流程
本发明涉及物体抓取,特别是涉及一种视觉引导机器人进行三维无序抓取物体的装置及方法。
背景技术:
1、市面上的机器人不能较好地进行三维无序抓取,导致在一定范围内,对工装治具及工具的摆放具有较高的要求,不适合现代制造业多品种小批量的发展趋势。
2、因此,现有技术存在不足,需要改进。
技术实现思路
1、针对上述现有技术存在的缺陷,本发明的目的在于提供一种视觉引导机器人进行三维无序抓取物体的装置及方法。
2、为实现上述目的,本发明提供了一种视觉引导机器人进行三维无序抓取物体的装置,包括第一视觉系统c1、第二视觉系统c2、机械臂控制装置r及夹持部e,所述第一视觉系统c1、第二视觉系统c2及夹持部e分别与机械臂控制装置r连接,所述机械臂控制装置r带动第一视觉系统c1、第二视觉系统c2及夹持部e运动并带动夹持部e对目标物体o进行夹持。
3、优选地,所述机械臂控制装置r包括第一机械臂装置r1与第二机械臂装置r2,所述第一机械臂装置r1与第一视觉系统c1及夹持部e连接,所述第二机械臂装置r2与第二视觉系统c2连接。
4、本发明提供了一种觉引导机器人进行三维无序抓取物体的方法,包括如下步骤:
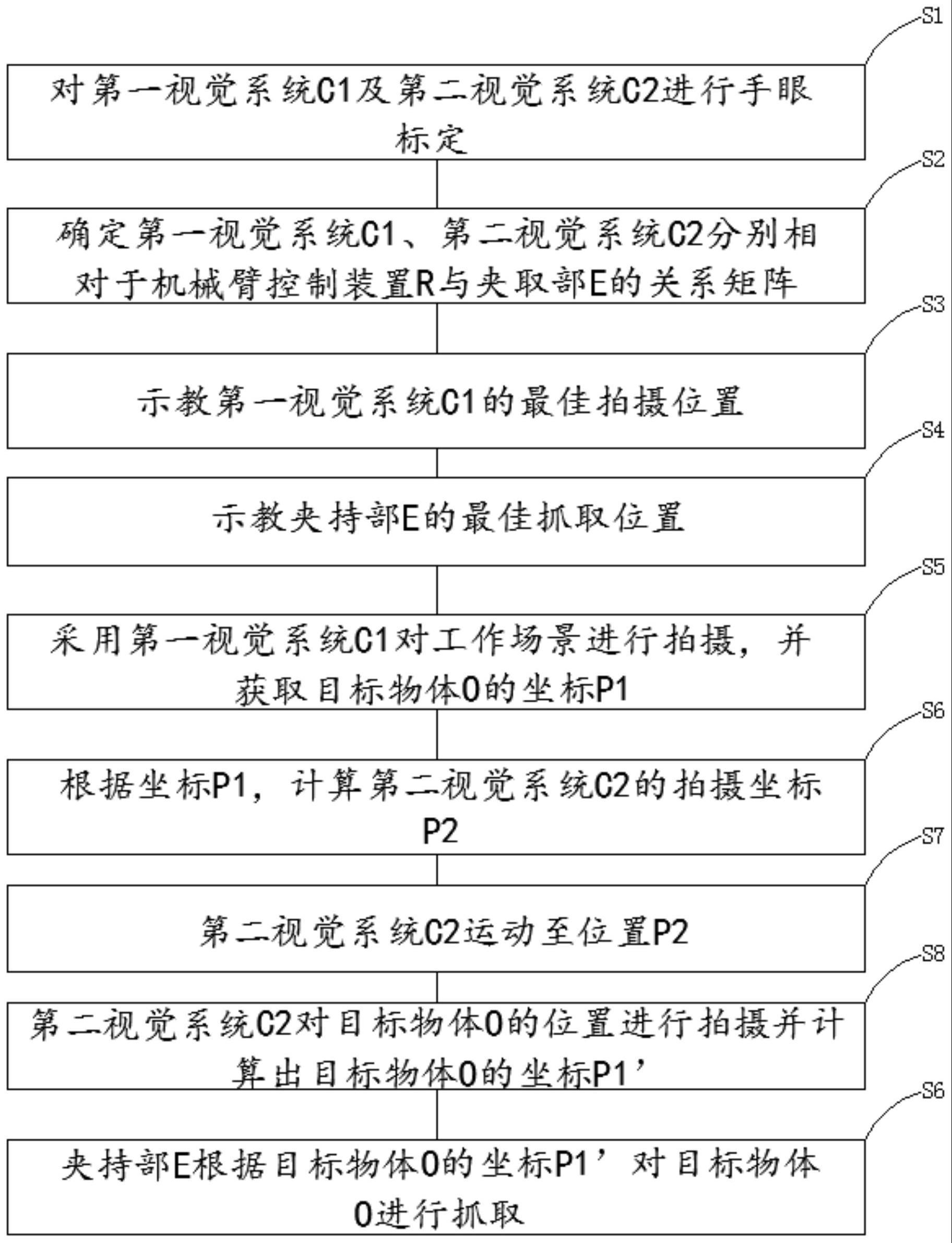
5、步骤s1:对第一视觉系统c1及第二视觉系统c2进行手眼标定;
6、步骤s2:确定第一视觉系统c1、第二视觉系统c2分别相对于机械臂控制装置r与夹取部e的关系矩阵;
7、步骤s3:示教第一视觉系统c1的最佳拍摄位置;
8、步骤s4:示教夹持部e的最佳抓取位置;
9、步骤s5:采用第一视觉系统c1对工作场景进行拍摄,并获取目标物体o的坐标p1;
10、步骤s6:根据坐标p1,计算第二视觉系统c2的拍摄坐标p2;
11、步骤s7:第二视觉系统c2运动至位置p2;
12、步骤s8:第二视觉系统c2对目标物体o的位置进行拍摄并计算出目标物体o的坐标p1’;
13、步骤s9:夹持部e根据目标物体o的坐标p1’对目标物体o进行抓取。
14、优选地,所述坐标p1为基于世界坐标系的坐标值。
15、优选地,所述坐标p1’为基于世界坐标系的坐标值。
16、与现有技术相比,本发明的有益效果是:
17、通过本发明的装置及方法,采用两套视觉系统,通过其中一视觉系统确定目标物体的初步位置,并对另一视觉系统的拍摄位置进行引导,在通过另一视觉系统对物体的位置进行识别,既能够获得较大的视野范围,又能够对目标物体的位置进行精确定位,实现了在三维环境下对物体的无序抓取,降低了对物体的摆放要求,适应了多品种小批量的发展趋势。
技术特征:
1.一种视觉引导机器人进行三维无序抓取物体的装置,其特征在于:所述视觉引导机器人进行三维无序抓取物体的装置包括第一视觉系统c1、第二视觉系统c2、机械臂控制装置r及夹持部e,所述第一视觉系统c1、第二视觉系统c2及夹持部e分别与机械臂控制装置r连接,所述机械臂控制装置r带动第一视觉系统c1、第二视觉系统c2及夹持部e运动并带动夹持部e对目标物体o进行夹持。
2.如权利要求1所述的视觉引导机器人进行三维无序抓取物体的装置,其特征在于:所述机械臂控制装置r包括第一机械臂装置r1与第二机械臂装置r2,所述第一机械臂装置r1与第一视觉系统c1及夹持部e连接,所述第二机械臂装置r2与第二视觉系统c2连接。
3.一种视觉引导机器人进行三维无序抓取物体的方法,其采用如权利要求1所述的视觉引导机器人进行三维无序抓取物体的装置,其特征在于:所述视觉引导机器人进行三维无序抓取物体的方法包括如下步骤:
4.如权利要求3所述的视觉引导机器人进行三维无序抓取物体的方法,其特征在于:所述坐标p1为基于世界坐标系的坐标值。
5.如权利要求3所述的视觉引导机器人进行三维无序抓取物体的方法,其特征在于:所述坐标p1’为基于世界坐标系的坐标值。
技术总结
本发明涉及物体抓取技术领域,特别是涉及一种视觉引导机器人进行三维无序抓取物体的装置,第一视觉系统C1、第二视觉系统C2、机械臂控制装置R及夹持部E,所述第一视觉系统C1、第二视觉系统C2及夹持部E分别与机械臂控制装置R连接,所述机械臂控制装置R带动第一视觉系统C1、第二视觉系统C2及夹持部E运动并带动夹持部E对目标物体O进行夹持。本发明还涉及一种视觉引导机器人进行三维无序抓取物体的方法,包括如下步骤:步骤S1:对第一视觉系统C1及第二视觉系统C2进行手眼标定;步骤S2:确定第一视觉系统C1、第二视觉系统C2分别相对于机械臂控制装置R与夹取部E的关系矩阵;步骤S3:示教第一视觉系统C1的最佳拍摄位置。
技术研发人员:陈珉,刘嘉容,刘秀,陈旭
受保护的技术使用者:深圳市超准视觉科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!