一种挂轨机器人行走驱动结构的制作方法
1.本发明涉及一种轨道式机器人,具体的是一种挂轨机器人行走驱动结构。
背景技术:
2.随着大型石油化工企业建设的不断增多,油品、燃气、毒气泄漏爆炸等灾害隐患不断增加,为减少事故的发生,对易燃易爆场所进行现场巡视,随时对现场信息进行采集、分析十分重要。巡检机器人作为一种可代替人工完成所有巡检作业,已经逐渐进入企事业单位。常见轨道机器人分为地面轨道巡检机器人,挂轨巡检机器人。
3.现有的挂轨巡检机器人存在以下缺点:1、挂轨巡检机器人一般都是在固定的轨道上行走完成巡检作业,机器人的行走驱动机构通常使用两个相对设置的驱动轮组,每个驱动轮组包括电机、传动装置和驱动轮,导致整合行走机构重量大、整体成本高。而且两个驱动轮各自有对应电机驱动容易产生不同步问题,特别是在转弯过程中,两个驱动轮不同步产生转向不稳定的问题。2、巡检机器人的行走驱动机构通常增加附加的导向及限位结构,这种加导向轮的结构与轨道会有一定的间隙,行走时容易出现抖动的情况发生,如果限位结构使导向轮的结构与轨道没有间隙又容易产生转向时卡死现象,这种结构复杂,成本高。3、巡检机器人在攀爬大角度坡度时,容易因为重力原因发生倾斜。
技术实现要素:
4.本发明提供了一种挂轨机器人行走驱动结构及挂轨机器人用以解决背景技术中提出的技术问题。
5.本发明解决上述技术问题采用的技术方案为:一种挂轨机器人行走驱动结构,包括导轨、与导轨连接的基座、以及设置在基座上的驱动机构和从动轮组,所述基座沿导轨方向移动;所述驱动机构包括驱动机构安装座、导向轴、压板、连接臂、驱动轮和驱动电机;所述驱动机构安装座固定于基座表面,所述导向轴与驱动机构安装座固连,所述压板的端部具有连接部,套接于所述导向轴,且可沿轴线方向移动;所述连接臂固定在压板上,用于连接所述驱动电机,所述驱动电机的转矩输出轴连接所述驱动轮,所述驱动轮与导轨一侧面滚动接触;所述从动轮组设置在驱动机构的相对侧,包括两个与导轨另一侧面滚动接触的从动轮;所述驱动轮及两个所述从动轮与导轨的夹紧点形成三角形结构;还包括有弹簧;所述导向轴的端部具有限位部,与压板的连接部之间设有所述弹簧,所述弹簧用于对驱动轮施加弹力,使所述驱动轮及两个所述从动轮均与导轨夹紧。
6.作为本发明的进一步优选,所述驱动轮的材质为选用航空铝骨架及导电聚氨酯材质;胎面使用免脱模技术增加与轨道摩擦力。
7.作为本发明的进一步优选,所述从动轮组包括从动轮安装座、从动轮安装板、转轴和从动轮;所述从动轮安装座固定于基座表面,所述从动轮安装板分为上安装板和下安装
板,均固定于从动轮安装座上,上下安装板之间设有所述转轴,所述转轴上连接有所述从动轮。
8.作为本发明的进一步优选,所述导向轴设置有两个,均与驱动机构安装座固连,且轴线方向与导轨垂直,所述压板的两个端部具有连接部,套接于两个所述导向轴。
9.作为本发明的进一步优选,所述驱动轮及两个所述从动轮均垂直于导轨设置,宽度小于或等于导轨的高度,在弹簧的作用下,始终垂直且夹紧于导轨。
10.作为本发明的进一步优选,所述连接臂的一端固定在压板上,另一端连接有隔爆壳,所述驱动电机位于隔爆壳内。
11.作为本发明的进一步优选,沿所述基座移动方向的前后端且位于驱动机构、从动轮组的两侧设置承载模块;所述承载模块包括承载轮、承载轮安装座,所述承载轮安装座固定于基座表面,所述承载轮可旋转的安装在承载轮安装座上。
12.作为本发明的进一步优选,所述承载轮平行于导轨设置,承载轮的直径小于或等于导轨的高度。
13.作为本发明的进一步优选,还包括有多个导向模块,位于前端承载模块之前、后端承载模块之后;所述导向模块包括导向轮安装座、摆臂和导向轮,所述导向轮安装座固定于承载轮安装座上,所述摆臂的一端与导向轮安装座固连并设置有扭簧,另一端与导向轮活动连接。
14.作为本发明的进一步优选,还包括有多个辅助模块,所述辅助模块设置在导向模块的下方,包括辅助轮安装座、辅助轮;所述辅助轮安装座固定在基座上,所述辅助轮可旋转的安装在辅助轮安装座上。
15.与现有技术相比,本发明的有益效果为:1、针对两个驱动轮组不同步的问题:本发明设置单独的驱动机构,通过从动轮组代替一个驱动轮组,可以实现减少成本、降低重量的效果;从动轮组包括两个从动轮,通过驱动机构驱动从动轮转动,从而带动机器人沿导轨方向移动,解决机器人驱动轮组不同步的问题,提高转向稳定性。
16.2、针对机器人抖动问题:本发明中驱动轮及两个从动轮与轨道的夹紧点为三角型结构,可以保证机器人行走驱动结构与导轨始终稳定的处于垂直状态,采用双弹簧结构,通过对驱动轮施加足够的弹力,使驱动轮及两个从动轮与导轨夹紧,从而解决机器人在工作过程中抖动的问题。
17.3、针对机器人爬坡容易倾斜问题:本发明设置承载模块,通过多个承载轮将机器人行走驱动结构挂设在导轨上,起到承受机器人重力的作用;前后端还设置有辅助模块,机器人在辅助轮与承载轮的共同作用下,可以适应更多的轨迹需求,保证机器人在攀爬大角度坡度时,避免因重力原因发生倾斜。
18.4、针对机器人转弯时不平顺问题:本发明设置导向模块,且在导向轮摆臂上安装扭簧,在机器人未入弯时,导向轮可以提供一定的转向力,使机器人入弯更加平顺,同时扭簧结构使机器人与轨道之间具有一定的初始压力,可以增加机器人行走过程中的稳定性。
19.5、选用航空铝骨架及导电聚氨酯材质做驱动轮,可以使机器人通过轨道实现接地防止静电产生,同时胎面使用免脱模技术增加与轨道摩擦力。
附图说明
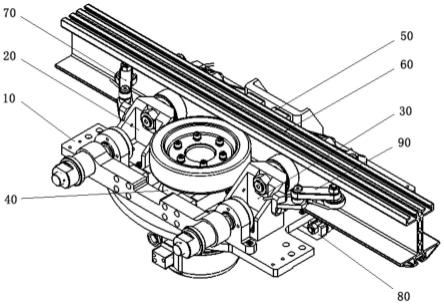
20.图1为行走驱动结构示意图一;图2为行走驱动结构示意图二;图3为从动轮组结构示意图;图4为驱动机构示意图一;图5为驱动机构示意图二;图中:10、基座,20、前承载模块,30、后承载模块,40、驱动机构,50、从动轮组,60、导轨,70、前导向模块,80、后辅助模块,90、后导向模块,100、前辅助模块;21、前承载轮安装座,22、前承载轮;31、后承载轮安装座,32、后承载轮;41、驱动机构安装座,42、压板,43、弹簧,44、螺母,45、导向轴,46、连接臂,47、驱动轮,48、隔爆壳,49、驱动电机;51、从动轮安装板,52、转轴,53、从动轮,54、从动轮安装座;71、前导向轮,72、前导向轮摆臂,73、扭簧,74、前导向轮安装座;81、后辅助轮,82、后辅助轮安装座;91、后导向轮,92、后导向轮摆臂,93、扭簧,94、后导向轮安装座;101、前辅助轮,102、前辅助轮安装座。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
23.实施例,请参照附图1-2,一种挂轨机器人行走驱动结构,包括导轨60、与导轨60连接的基座10、以及设置在基座10上的驱动机构40和从动轮组50,基座10沿导轨60方向移动,挂轨机器人安装在基座10上。
24.如图4-5所示,驱动机构40包括驱动机构安装座41、压板42、弹簧43、螺母44、导向轴45、连接臂46、驱动轮47、隔爆壳48和驱动电机49。驱动机构安装座41固定于基座10表面,导向轴45设置有两个,与驱动机构安装座41固连且轴线方向与导轨60垂直,压板42的两个端部具有连接部,套接于两个导向轴45,且可沿轴线方向移动。连接臂46固定在压板42上,用于连接驱动电机49,驱动电机49的转矩输出轴连接驱动轮47,驱动轮47与导轨60的一侧面滚动接触。
25.如图3所示,从动轮组50设置在驱动机构40的相对侧,包括从动轮安装板51、转轴52、从动轮53和从动轮安装座54。从动轮安装座54固定于基座10表面,从动轮安装板51分为上安装板和下安装板,均固定于从动轮安装座54上,上下安装板之间设有转轴52,转轴52上
连接有从动轮53。两个从动轮53与轨道60的另一侧面滚动接触,驱动轮47及两个从动轮53与导轨60的夹紧点形成三角形结构,保证机器人行走驱动结构与导轨60始终稳定的处于垂直状态。导向轴45的端部为用于限位的螺母44,螺母44与压板42的连接部之间设有弹簧43,采用双弹簧结构,通过对驱动轮47施加足够的弹力,使驱动轮47及两个从动轮53与导轨60夹紧,从而解决机器人在工作过程中抖动的问题。
26.进一步说明,连接部46的一端均固定在压板42上,另一端连接有隔爆壳48,驱动电机49位于隔爆壳48内。驱动电机49选用力矩电机加摩擦式制动保持器具有刹车功能,这样可以避免机器人在爬升过程或行进过程中驱动系统故障时出现无法制动停止的事故。
27.进一步说明,驱动轮47选用航空铝骨架及导电聚氨酯材质,这样可以使机器人通过轨道60实现接地防止静电产生,同时胎面使用免脱模技术增加与轨道摩擦力。驱动轮47及两个从动轮53均垂直于导轨60设置,宽度与导轨60的高度一致,在弹簧43的作用下,始终垂直且夹紧于导轨60。
28.如图1-2所示,于驱动机构40、从动轮组50的两端分别设置前承载模块20、后承载模块30。前承载模块20包括前承载轮安装座21、前承载轮22,前承载轮安装座31固定于基座10表面,前承载轮32可旋转的安装在前承载轮安装座31上。后承载模块30包括后承载轮安装座31、后承载轮32,后承载模块30的安装结构与前承载模块20一致,这里不做赘述。前后承载轮均平行于导轨60设置,承载轮的直径与导轨60的高度一致,行走驱动结构整体依靠前承载模块20和后承载模块30挂设在导轨60上,起到承受巡检机器人重力的作用。
29.如图1-2所示,为了使巡检机器人在转弯时更加平顺,行走驱动结构还包括有导向模块。于前承载模块20的前端设置前导向模块70,前导向模块70包括前导向轮71、前导向轮摆臂72、扭簧73和前导向轮安装座74,前导向轮安装座74固定于前承载轮安装座21上,前导向轮摆臂72的一端与前导向轮安装座74固连并设置有扭簧73,另一端与前导向轮71活动连接。于后承载模块30的后端设置有后导向模块90,后导向模块90包括后导向轮91、后导向轮摆臂92、扭簧93和后导向轮安装座94,安装结构与前导向模块70相同,这里不做赘述。采用前、后导向模块70、90结构,导向轮摆臂末端设置钮簧,在机器人未入弯时,导向轮可以提供一定的转向力,使机器人入弯更加平顺,同时扭簧结构使机器人与轨道60之间具有一定的初始压力,可以增加机器人行走过程中的稳定性。
30.如图1-2所示,为了适应更多的轨迹需求,保证巡检机器人在攀爬大角度坡度时,避免因为重力原因发生倾斜,行走驱动结构还包括有辅助模块。在前导向模块70的下方设置前辅助模块100,前辅助模块100包括前辅助轮101、前辅助轮安装座102,前辅助轮安装座102固定在基座10上,前辅助轮101可旋转的安装在前辅助轮安装座102上。在后导向模块90的下方设置后辅助模块80,后辅助模块80包括后辅助轮81、后辅助轮安装座82,安装结构与前辅助模块100相同,这里不再赘述。机器人在承载轮跟辅助轮的共同作用下,不会发生倾斜事故。
31.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1