包括弯曲工具的机器人系统及其故障检测方法与流程
本公开涉及医疗器械领域,尤其涉及一种包括弯曲工具的机器人系统及其故障检测方法。
背景技术:
1、微创术式对病人创伤更小、术后产出更高,已经在外科手术中占据了重要的地位。其利用手术工具,包括视觉照明模块和手术操作臂在内的手术器械均通过切口或者自然腔道进入人体中到达术部进行手术。现有手术器械主要为刚性直杆,刚性直杆的远端设有多杆件串联铰接的腕关节,通过钢丝绳拉力驱动,使手术器械在铰接关节处实现弯转。
2、由手术机器人的多个定位臂分别搭载的多个刚性直杆手术器械通过单一切口或自然腔道进行手术时,在体外通常需要较大的运动工作空间,以带动刚性直杆手术器械的远端腕关节运动,以满足远端灵活性。但是,较大范围的运动,容易造成手术器械之间发生碰撞,存在安全隐患。另外,在机器人系统运行过程中,需要对机器人系统的工作状况进行检测。在发生故障时采取必要的应对措施,否则可能会操作失败,甚至造成不可挽回的损失。
技术实现思路
1、本公开提供一种用于弯曲工具机器人系统的故障检测方法,所述机器人系统包括至少一个运动臂以及设置在所述至少一个运动臂的远端的至少一个弯曲工具,所述弯曲工具包括弯曲刚性臂和设置在所述弯曲工具远端的末端装置,所述故障检测方法包括:
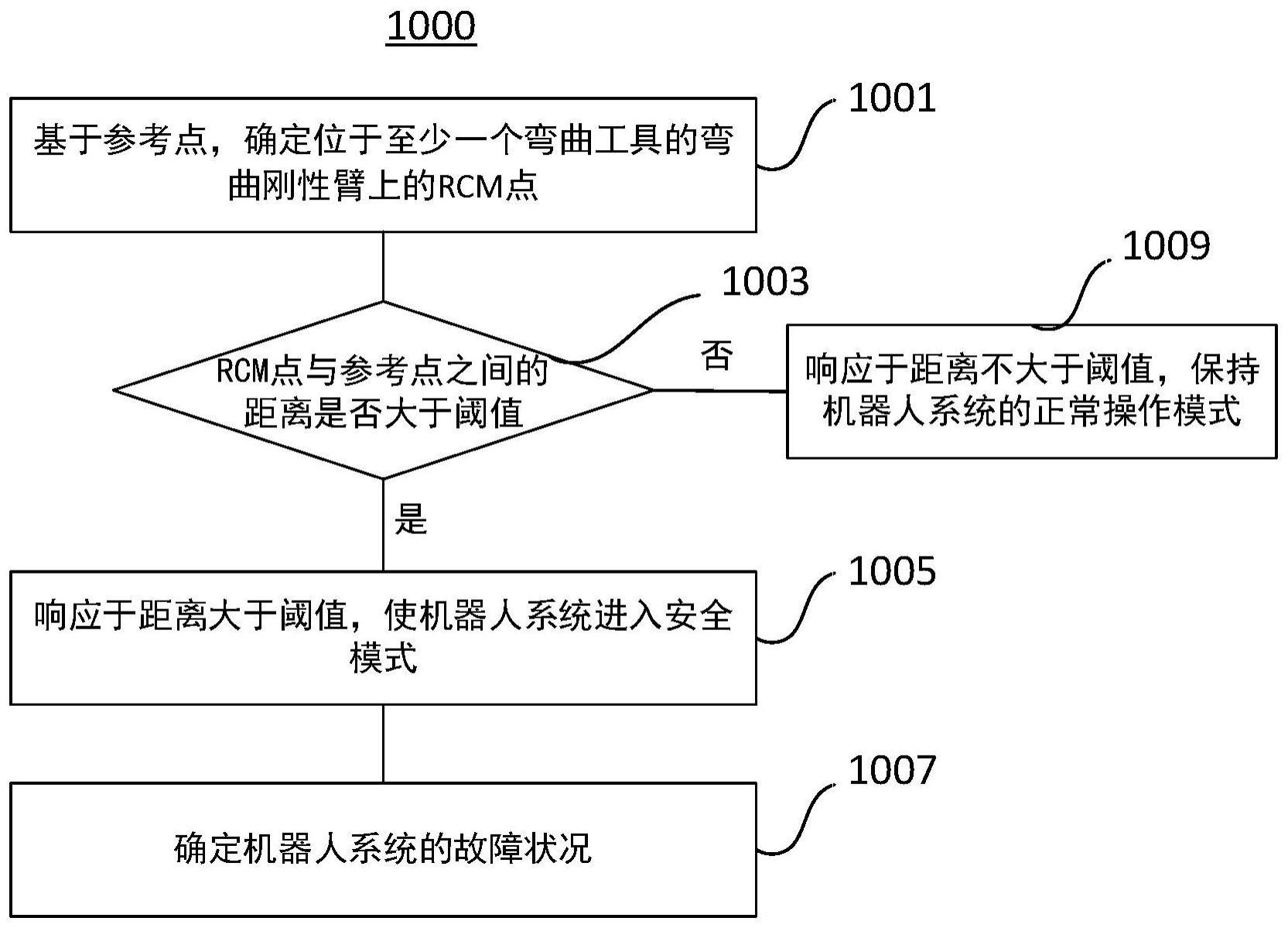
2、基于参考点,确定位于所述至少一个弯曲工具的弯曲刚性臂上的远程运动中心(rcm)点;
3、判断所述rcm点与所述参考点之间的距离是否大于阈值;
4、响应于所述距离大于阈值,使所述机器人系统进入安全模式;以及
5、确定所述机器人系统的故障状况。
6、在一些实施例中,本公开还提供了一种机器人系统,包括:至少一个运动臂;至少一个弯曲工具,设置在所述至少一个运动臂的远端,所述弯曲工具包括弯曲刚性臂和设置在所述弯曲工具远端的末端装置;以及控制装置,被设置成基于运动命令,执行如本公开任意实施例中所述的故障检测方法。
7、在一些实施例中,本公开还提供了一种计算机设备,所述计算机设备包括:存储器,用于存储至少一条指令;以及处理器,与所述存储器耦合并且用于执行所述至少一条指令以执行如本公开任意实施例中所述的故障检测方法。
8、本公开还提供了一种计算机可读存储介质,用于存储至少一条指令,所述至少一条指令由计算机执行时致使所述计算机实现如本公开任意实施例中所述的故障检测方法。
技术特征:
1.一种用于弯曲工具机器人系统的故障检测方法,其特征在于,所述机器人系统包括至少一个运动臂以及设置在所述至少一个运动臂的远端的至少一个弯曲工具,所述弯曲工具包括弯曲刚性臂和设置在所述弯曲工具远端的末端装置,所述故障检测方法包括:
2.根据权利要求1所述的故障检测方法,其特征在于,使所述机器人系统进入安全模式包括:
3.根据权利要求1所述的故障检测方法,其特征在于,还包括:
4.根据权利要求3所述的故障检测方法,其特征在于,所述故障恢复操作包括:
5.根据权利要求3所述的故障检测方法,其特征在于,还包括:
6.根据权利要求3所述的故障检测方法,其特征在于,
7.根据权利要求3所述的故障检测方法,其特征在于,所述机器人系统包括控制装置、用于中继所述控制装置发送的驱动信号的通信节点以及用于与所述通信节点通信的通信模块,
8.根据权利要求3所述的故障检测方法,其特征在于,所述故障恢复操作还包括:
9.根据权利要求7或8所述的故障检测方法,其特征在于,还包括:
10.根据权利要求3所述的故障检测方法,其特征在于,还包括:
11.根据权利要求1-8、10中的任一项所述的故障检测方法,其特征在于,还包括:
12.根据权利要求1所述的故障检测方法,其特征在于,基于参考点确定位于所述至少一个弯曲工具的弯曲刚性臂上的rcm点,包括:
13.根据权利要求11所述的故障检测方法,其特征在于,还包括:
14.根据权利要求11所述的故障检测方法,其特征在于,还包括:
15.根据权利要求14所述的故障检测方法,其特征在于,确定所述至少一个弯曲工具上的所述rcm点的径向收敛速度包括:
16.根据权利要求15所述的故障检测方法,其特征在于,确定与所述径向收敛速度相关的雅可比矩阵包括:
17.根据权利要求11所述的故障检测方法,其特征在于,还包括:
18.根据权利要求11所述的故障检测方法,其特征在于,所述目标位姿包括目标位置和目标姿态,所述方法还包括:
19.根据权利要求1-8、10、12-18中任一项所述的故障检测方法,其特征在于,
20.一种机器人系统,包括:
21.根据权利要求20所述的机器人系统,其特征在于,所述弯曲刚性臂包括第一弯曲段和第二弯曲段,所述弯曲工具的可弯转组件包括至少一个远端连续体构节,所述远端连续体构节包括多根远端结构骨、远端基盘、远端止盘和设置在所述远端基盘和所述远端止盘之间的至少一个远端间隔盘,所述多根远端结构骨的远端与所述远端止盘固定连接,所述多根远端结构骨可滑动地穿过所述至少一个远端间隔盘和所述远端基盘;或者
22.根据权利要求20所述的机器人系统,其特征在于,所述至少一个弯曲工具包括能够通过单个开口进行操作的多个弯曲工具。
23.一种计算机设备,所述计算机设备包括:
24.一种计算机可读存储介质,用于存储至少一条指令,所述至少一条指令由计算机执行时致使所述计算机实现如权利要求1-19中任一项所述的故障检测方法。
技术总结
本公开涉及医疗器械领域,公开一种包括弯曲工具的机器人系统及其故障检测方法,机器人系统包括至少一个运动臂以及至少一个弯曲工具,弯曲工具包括弯曲刚性臂和设置在弯曲工具远端的末端装置。故障检测方法包括:基于参考点,确定位于至少一个弯曲工具的弯曲刚性臂上的远程运动中心(RCM)点,判断RCM点与参考点之间的距离是否大于阈值。响应于距离大于阈值,使机器人系统进入安全模式;以及确定机器人系统的故障状况。该故障检测方法能根据故障状况采取对应的处理措施,以保证机器人系统的操作安全性,另外,该方法可以控制弯曲工具绕弯曲刚性臂上的RCM点运动,弯曲刚性臂可以增强手术工具的刚度,增加末端装置的运动灵活性。
技术研发人员:徐凯,吴中昊,朱传祥,丁跃,王一帆,姬利永,陈诗英
受保护的技术使用者:北京术锐机器人股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!