一种智能机器人的减震底座的制作方法
1.本发明涉及区块链技术领域,更具体地说,涉及一种智能机器人的减震底座。
背景技术:
2.智能机器人一般是通过红外或者超声波等传感器识别障碍物并进行躲避,但是常规的红外或者超声波等往往存在一定的视觉盲区。并且红外传感器无法探测黑色以及透明度障碍物;而超声波探测器则存在波束角偏大,且易互相干扰的问题。因此,单纯使用“软防撞”的方式并不能完全避免机器人与障碍物发生碰撞。
3.现有公开号为cn215411188u的专利文献提供一种用于区块链智能机器人的减震底座,该装置通过防撞弹簧和防撞环对底座凹槽进行保护,避免撞击对智能机器人进行保护,通过缓冲组件中的缓冲弹簧在缓冲腔内对机器人移动过程中产生的震动进行缓冲降解,保护机器人,通过安装板下的第一减震弹簧和第二减震弹簧对机器人安装使用过程中进行保护,实现减震,同时防止外来压力对减震底座和机器人造成损坏,延长智能机器人的使用寿命,整个装置安装方便,结构稳定。这种减震底座能够辅助智能机器人原有的“软防撞”的方式,对智能机器人进行进一步的防护,但该装置仍存在下列问题:该装置通过设置防撞弹簧和防撞环对底座凹槽进行保护,此种防护方法在机器人与外部物体发生碰撞时,防撞弹簧会先吸收冲击力并再次释放,并反向推动底座,容易造成机器人倾倒,导致保护效果不理想。鉴于此,我们提出一种智能机器人的减震底座。
技术实现要素:
4.1.要解决的技术问题
5.本发明的目的在于提供一种智能机器人的减震底座,以解决上述背景技术中提出的问题。
6.2.技术方案
7.一种智能机器人的减震底座,包括减震底座主体以及驱动机构,所述驱动机构设置于智能机器人主体底部,所述驱动机构能够驱动所述机器人主体行走,其特征在于:所述减震底座主体包括外框体,所述外框体与机器人主体可拆卸连接,所述外框体内限位转动连接有转动环,所述转动环外侧开设有多个滑槽,所述外框体内滑动设有推杆,所述推杆外端固定连接有防撞板,所述推杆的内端抵触在对应所述滑槽的侧壁上;且所述防撞板受撞击后能够带动所述推杆抵触所述滑槽使得所述转动环相对于所述外框体转动;所述转动环上方设有缓冲机构与锁止机构。
8.作为本技术技术方案的一可选方案,所述缓冲机构包括复位弹簧a,所述复位弹簧a一端与转动环连接固定,另一端与外框体连接固定。
9.作为本技术技术方案的一可选方案,所述转动环一侧开设有限位槽,所述限位槽内滑动连接有限位杆,所述限位杆能够限制转动环的转动,所述限位杆与外框体连接固定。
10.作为本技术技术方案的一可选方案,所述锁止机构包括棘轮b与棘爪,所述棘爪外
侧套设有套筒,所述套筒内设有弹簧b,所述套筒与棘爪滑动连接,所述套筒与外框体安装固定,所述棘轮b中部通过转轴固定连接有齿轮a,所述转轴与外框体转动连接,所述转动环一侧开设有弧形齿槽,所述弧形齿槽与齿轮a啮合连接。
11.作为本技术技术方案的一可选方案,所述外框体内设有反馈调节机构,所述反馈调节机构与外框体安装固定。
12.作为本技术技术方案的一可选方案,所述反馈调节机构包括控制机构、设置在复位弹簧a端部的第一压力传感器,所述第一压力传感器与外框体安装固定,所述第一压力传感器与控制机构电性连接,所述控制机构与驱动机构电性连接。
13.作为本技术技术方案的一可选方案,所述反馈调节机构还包括电动伸缩杆,所述电动伸缩杆与外框体安装固定,所述电动伸缩杆与控制机构与电性连接,所述电动伸缩杆与套筒安装固定,所述电动伸缩杆能够在控制机构的控制下带动棘爪做往复运动,对棘轮b进行复位。
14.作为本技术技术方案的一可选方案,所述外框体底面安装有多个路况监测机构,所述路况监测机构能够对路面的平整度进行监测。
15.作为本技术技术方案的一可选方案,所述路况监测机构包括套杆,所述套杆与外框体安装固定,所述套杆内部安装有第二压力传感器,所述第二压力传感器下方依次设有弹簧c与探杆,所述探杆与套杆滑动连接,所述探杆能够在弹簧c的作用下向下伸出并与地面接触,所述第二压力传感器与控制机构与电性连接。
16.作为本技术技术方案的一可选方案,所述探杆下端开设有转动球座,所述转动球座内转动连接有滚珠。
17.3.有益效果
18.相比于现有技术,本技术技术方案的优点在于:
19.(1)本技术技术方案通过设置缓冲机构与锁止机构,使得防撞板在与外部机构发生碰撞时,能够通过防撞板推动推杆在滑槽内滑动,促使转动环进行转动并压缩复位弹簧a,对冲击力进行吸收,并通过锁止机构,阻止复位弹簧a的回弹,解决了原装置在机器人与外部物体发生碰撞时,防撞弹簧会先吸收冲击力并再次释放,并反向推动底座,容易造成机器人倾倒,导致保护效果不理想的问题。
20.(2)本技术技术方案通过设置控制机构与第一压力传感器,使得复位弹簧a在压缩时,控制机构能够通过第一压力传感器的压力信号的变化做出防撞板与外部物体发生碰撞的判断,并反馈给驱动机构,使得驱动机构能够及时对行径方向与速度进行调整;此外控制机构能够通过第一压力传感器的压力信号与设定的时间间隔,控制电动伸缩杆缩短与伸长,对防撞板进行复位,恢复防撞板的防护功能。
21.(3)本技术技术方案通过设置路况监测机构,使得探杆底部的滚珠能够在路面上滚动,并在路面的作用下推动探杆,改变弹簧c的内力,控制机构能够根据多个第二压力传感器信号之间的差值,对路面的情况进行监测,在多个第二压力传感器信号之间的差值较大时,控制机构能够对驱动机构进行反馈,驱动机构能够对速度进行降低,进而降低机器人主体受到的震动。
附图说明
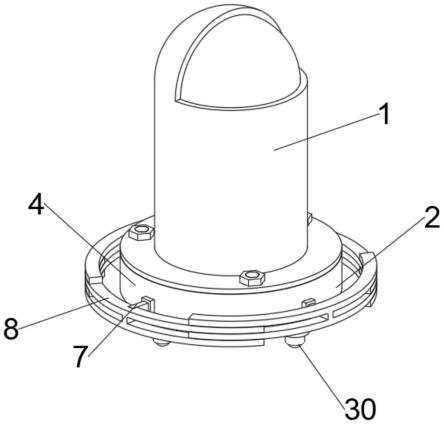
22.图1为本技术一较佳实施例中公开的智能机器人的减震底座的整体结构示意图;
23.图2为本技术一较佳实施例中公开的智能机器人的减震底座的整体结构拆分图;
24.图3为本技术一较佳实施例中公开的智能机器人的减震底座的底座结构示意图;
25.图4为本技术一较佳实施例中公开的智能机器人的减震底座的底座结构拆分图;
26.图5为本技术一较佳实施例中公开的智能机器人的减震底座的锁止结构示意图;
27.图6为本技术一较佳实施例中公开的智能机器人的减震底座的路况监测结构示意图;
28.图7为本技术一较佳实施例中公开的智能机器人的减震底座的路况监测结构拆分图;
29.图中标号说明:1、机器人主体;2、减震底座主体;3、驱动机构;4、外框体;5、转动环;6、滑槽;7、推杆;8、防撞板;9、缓冲机构;10、锁止机构;11、复位弹簧a;12、限位槽;13、限位杆;14、棘轮b;15、棘爪;16、齿轮a;17、弧形齿槽;18、套筒;19、弹簧b;20、反馈调节机构;21、控制机构;22、第一压力传感器;23、电动伸缩杆;24、套杆;25、第二压力传感器;26、弹簧c;27、探杆;28、转动球座;29、滚珠;30、路况监测机构。
具体实施方式
30.请参阅图1-7,本发明提供一种技术方案:
31.一种智能机器人的减震底座,包括减震底座主体2以及安装在机器人主体1下部的驱动机构3,减震底座主体2包括外框体4,外框体4与机器人主体1可拆卸连接,外框体4内限位转动连接有转动环5,转动环5外侧开设有多个滑槽6,外框体4内滑动设置有推杆,推杆7外端固定连接有防撞板8,推杆7的内端抵触在对应滑槽6的侧壁上,防撞板8具有一定的挠性,当防撞板8受到撞击后能够带动推杆7抵动滑槽,使得转动环相对于外框体转动;转动环5上方设有缓冲机构9与锁止机构10。
32.本装置能够有效地对机器人主体1进行保护。
33.具体的,缓冲机构9包括复位弹簧a11,复位弹簧a11一端与转动环5连接固定、另一端与外框体4连接固定。
34.使得缓冲机构9能够对冲击力进行吸收。
35.进一步的,转动环5一侧开设有限位槽12,限位槽12内滑动连接有限位杆13,限位杆13能够限制转动环5的转动,限位杆13与外框体4连接固定。
36.使得转动环5能够在限位杆13的限位下保持固定。
37.再进一步的,锁止机构10包括棘轮b14与棘爪15,棘爪15外侧套设有套筒18,套筒18内设有弹簧b19,套筒18与棘爪15滑动连接,套筒18与外框体4安装固定,棘轮b14中部通过转轴固定连接有齿轮a16,转轴与外框体4转动连接,转动环5一侧开设有弧形齿槽17,弧形齿槽17与齿轮a16啮合连接。
38.使得锁止机构10能够阻止复位弹簧a11的回弹。
39.更进一步的,外框体4内设有反馈调节机构20,反馈调节机构20与外框体4安装固定。
40.值得说明的是,反馈调节机构20包括控制机构21、设置在复位弹簧a11端部的第一
压力传感器22,第一压力传感器22与外框体4安装固定,第一压力传感器22与控制机构21电性连接,控制机构21与驱动机构3电性连接。
41.值得注意的是,反馈调节机构20还包括电动伸缩杆23,电动伸缩杆23与外框体4安装固定,电动伸缩杆23与控制机构21与电性连接,电动伸缩杆23与套筒18安装固定,电动伸缩杆23能够在控制机构21的控制下带动棘爪15做往复运动,对棘轮b14进行复位。
42.反馈调节机构20能够在防撞板8受到冲击时,对驱动机构3进行及时的反馈。
43.除此之外,外框体4底面安装有多个路况监测机构30,路况监测机构30能够对路面的平整度进行监测。
44.路况监测机构30包括套杆24,套杆24与外框体4安装固定,套杆24内部安装有第二压力传感器25,第二压力传感器25下方依次设有弹簧c26与探杆27,探杆27与套杆24滑动连接,探杆27能够在弹簧c26的作用下下向伸出并与地面接触,第二压力传感器25与控制机构21与电性连接。
45.探杆27下端开设有转动球座28,转动球座28内转动连接有滚珠29。
46.路况监测机构30能够对路面的平整度进行监测,并通过控制机构21对驱动机构3进行反馈。
47.本装置在使用时,先将机器人主体1安装到减震底座主体2上,在机器人主体1通过驱动机构3行走时,防撞板8能够对机器人主体1进行防护。
48.在防撞板8与外部物体发生碰撞时,防撞板8将带动推杆7向外框体4内滑动,推杆7的内端将在滑槽6的内壁上滑动,并推动转动环5转动,使得转动环5转动时,将对复位弹簧a11进行压缩,对冲击力进行吸收;与此同时,齿轮a16将在弧形齿槽17的带动下发生转动,并通过转轴带动棘轮b14转动,设置的棘爪15将限制棘轮b14的反向转动,阻止复位弹簧a11发生回弹。
49.不仅如此,压缩复位弹簧a11将对其端部的第一压力传感器22产生额外的压力,控制机构21能够依据第一压力传感器22压力信号的变化,做出防撞板8与外部物体发生碰撞的判断,并向机器人主体1上的驱动机构3进行反馈,驱动机构3能够根据控制机构21反馈的信号对行进的方向与速度进行调整。
50.在驱动机构3依据控制机构21反馈的信号做出调整后,控制机构21能够根据设定的时间间隔,控制电动伸缩杆23进行缩短与伸长,使得棘爪15能够解除对棘轮b14的限位作用,进而使得复位弹簧a11能够推动转动环5进行复位,使得转动环5上滑槽6的内壁能够向外推动推杆7,将防撞板8向外推动复位,维持防撞板8的防护功能。
51.在减震底座主体2随着机器人主体1发生移动时,探杆27将在弹簧c26的推动下,将探杆27底部的滚珠29推附在路面上,路面上的凹凸不平,将会通过探杆27伸出套杆24的长度进行反应,而弹簧c26的内力将发生变化,控制机构21能够根据多个第二压力传感器25的压力信号之间的差值对路面的凹凸状况进行分析,并传输给驱动机构3,当多个弹簧c26之间的内力差值较大时,能够做出路况较差的判断,驱动机构3根据控制机构21传输的信号对行进的速度进行降低,进而降低机器人主体1受到的震动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1