基于桁架机械手的柔性抓取机构及井下工具的抓取方法与流程
本发明属于井下工具批量生产,具体涉及基于桁架机械手的柔性抓取机构及井下工具的抓取方法。
背景技术:
1、井下工具(例如井下安全阀(sssv)、滑套(sliding sleev)、工作筒(nipple)、偏心工作筒(side pocket mandrel)、座落接头(seating nipple)、流动短节(flow couping)、加厚管)是油田设备的一部分,用于钻井、完井以及干预或修井活动中,可帮助油井优化生产水平,并保持来自油藏的连续流量。井下工具有助于使从油井执行与采油相关的活动所涉及的成本最小化,并且有助于改善油井的寿命,从而改善流体的连续流动。在井下工具的加工过程中,传统加工方式采用人工上下料,导致井下工具的加工效率低下。
技术实现思路
1、针对现有技术中存在的问题,本发明提供了基于桁架机械手的柔性抓取机构及井下工具的抓取方法,能够快速稳定的抓取井下工具生产料件。
2、为了解决上述技术问题,本发明通过以下技术方案予以实现:
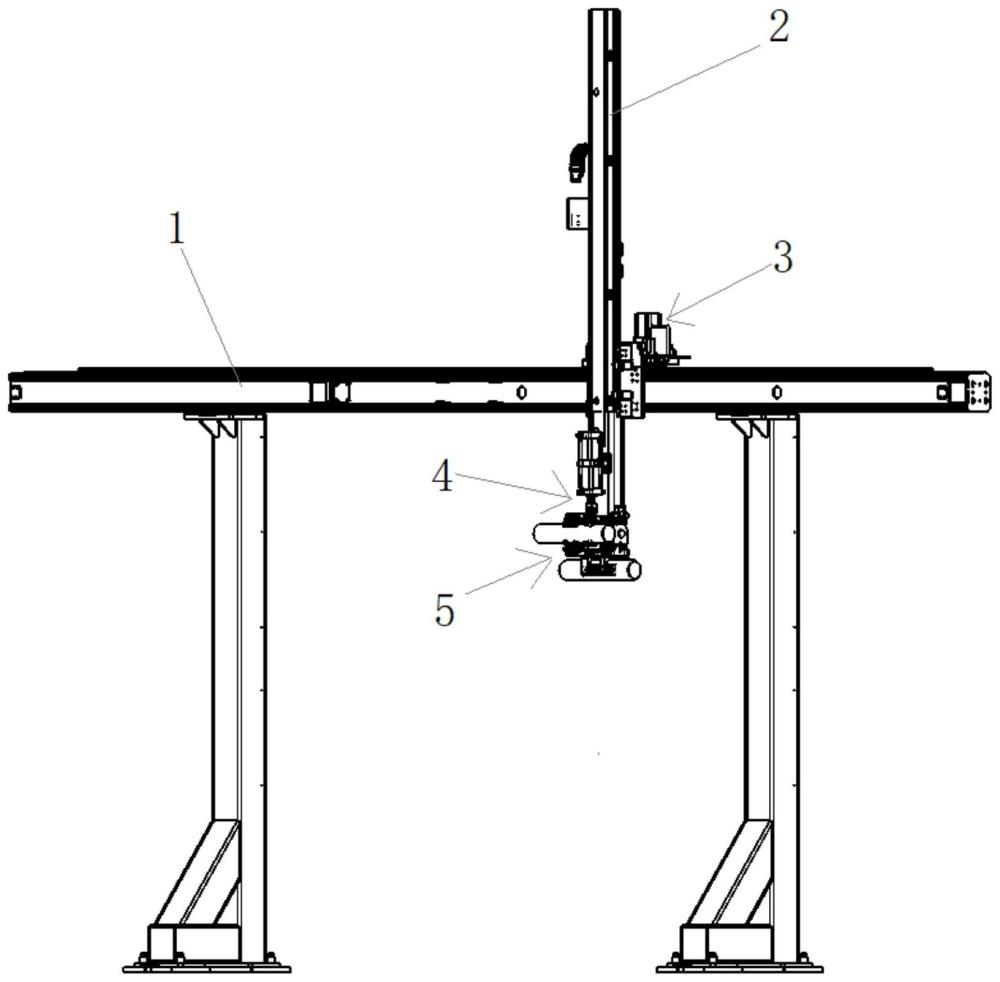
3、一种基于桁架机械手的柔性抓取机构,包括横梁和竖梁,所述横梁和所述竖梁通过连接机构连接,所述连接机构滑动设置在所述横梁上,所述竖梁相对于所述连接机构能够上下滑动;所述竖梁的底部连接有翻转机构,所述翻转机构上连接有用于抓取工件的夹爪装置。
4、进一步地,所述连接机构包括连接板、滑动设置在所述横梁上的第一滑块和滑动设置在所述竖梁上的第二滑块,所述连接板位于所述横梁和所述竖梁之间,所述第一滑块连接在所述连接板上靠近所述横梁的一侧,所述第二滑块连接在所述连接板上靠近所述竖梁的一侧。
5、进一步地,所述连接机构还包括第一驱动装置、第二驱动装置、设置在所述横梁上的第一齿条和设置在所述竖梁上的第二齿条,所述第一驱动装置固定在所述第一滑块上,所述第一驱动装置的输出端连接有与所述第一齿条啮合连接的齿轮,所述第二驱动装置固定在所述连接板上,所述第二驱动装置的输出端连接有与所述第二齿条啮合连接的齿轮。
6、进一步地,所述第一驱动装置和所述第二驱动装置为电机减速机。
7、进一步地,所述连接机构还包括设置在所述横梁上的第一导轨和设置在所述竖梁上的第二导轨,所述第一导轨与所述第一滑块导向连接,所述第二导轨与所述第二滑块导向连接。
8、进一步地,所述翻转机构包括连接座、翻转壳和伸缩驱动装置,所述连接座固定在所述竖梁的底部,所述翻转壳转动连接在所述连接座上,所述伸缩驱动装置固定在所述竖梁上,所述伸缩驱动装置的伸缩端与所述翻转壳铰接;所述翻转壳的底部外壁和后侧外壁分别连接有所述夹爪装置。
9、进一步地,所述伸缩驱动装置为气缸。
10、进一步地,所述夹爪装置包括夹爪和用于驱动所述夹爪开合的夹钳,所述夹钳连接在所述翻转壳的外壁,所述夹爪安装在所述夹钳上。
11、进一步地,所述翻转壳的底部和侧部均连接有所述夹爪装置。
12、一种井下工具的抓取方法,应用所述的柔性抓取机构,包括:控制连接机构沿横梁横向移动,带动竖梁以及竖梁底部连接的夹爪装置一起横向移动,控制竖梁沿竖向移动,带动竖梁底部连接的夹爪装置一起竖向移动,当夹爪装置移动到井下工具位置时,通过夹爪装置实现对井下工具抓取。
13、与现有技术相比,本发明至少具有以下有益效果:
14、本发明提供的一种基于桁架机械手的柔性抓取机构,在使用时,通过控制连接机构沿横梁横向移动,进而带动竖梁以及竖梁底部连接的夹爪装置一起横向移动,移动过程中根据实际作业工况,配合控制竖梁沿竖向移动,进而带动竖梁底部连接的夹爪装置一起竖向移动,当夹爪装置移动到适合抓取井下工具生产工件的位置时,通过夹爪装置实现对井下工具生产工件的抓取,本发明相对于传统加工中采用人工上下料的方式,能够快速稳定的抓取井下工具生产料件,有效的提高了井下工具的加工效率。
15、进一步地,在翻转壳的底部外壁和后侧外壁分别连接有夹爪装置,通过控制伸缩驱动装置的伸缩,可以控制翻转壳上的两个夹爪装置一次性抓取两个井下工具,当其中第一个夹爪装置处于第一位置时,第二个夹爪装置处于第二位置,当第一个夹爪装置处于第二位置时,第二个夹爪装置处于第三位置,即本发明的翻转机构具备两个面三个工作位置的功能,在快速稳定的抓取井下工具生产料件的同时,更加有效的提高了井下工具的加工效率。
16、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种基于桁架机械手的柔性抓取机构,其特征在于,包括横梁(1)和竖梁(2),所述横梁(1)和所述竖梁(2)通过连接机构(3)连接,所述连接机构(3)滑动设置在所述横梁(1)上,所述竖梁(2)相对于所述连接机构(3)能够上下滑动;所述竖梁(2)的底部连接有翻转机构(4),所述翻转机构(4)上连接有用于抓取工件的夹爪装置(5)。
2.根据权利要求1所述的一种基于桁架机械手的柔性抓取机构,其特征在于,所述连接机构(3)包括连接板(301)、滑动设置在所述横梁(1)上的第一滑块(302)和滑动设置在所述竖梁(2)上的第二滑块(303),所述连接板(301)位于所述横梁(1)和所述竖梁(2)之间,所述第一滑块(302)连接在所述连接板(301)上靠近所述横梁(1)的一侧,所述第二滑块(303)连接在所述连接板(301)上靠近所述竖梁(2)的一侧。
3.根据权利要求2所述的一种基于桁架机械手的柔性抓取机构,其特征在于,所述连接机构(3)还包括第一驱动装置(306)、第二驱动装置(307)、设置在所述横梁(1)上的第一齿条(304)和设置在所述竖梁(2)上的第二齿条(305),所述第一驱动装置(306)固定在所述第一滑块(302)上,所述第一驱动装置(306)的输出端连接有与所述第一齿条(304)啮合连接的齿轮,所述第二驱动装置(307)固定在所述连接板(301)上,所述第二驱动装置(307)的输出端连接有与所述第二齿条(305)啮合连接的齿轮。
4.根据权利要求3所述的一种基于桁架机械手的柔性抓取机构,其特征在于,所述第一驱动装置(306)和所述第二驱动装置(307)为电机减速机。
5.根据权利要求2所述的一种基于桁架机械手的柔性抓取机构,其特征在于,所述连接机构(3)还包括设置在所述横梁(1)上的第一导轨(308)和设置在所述竖梁(2)上的第二导轨(309),所述第一导轨(308)与所述第一滑块(302)导向连接,所述第二导轨(309)与所述第二滑块(303)导向连接。
6.根据权利要求1所述的一种基于桁架机械手的柔性抓取机构,其特征在于,所述翻转机构(4)包括连接座(401)、翻转壳(402)和伸缩驱动装置(403),所述连接座(401)固定在所述竖梁(2)的底部,所述翻转壳(402)转动连接在所述连接座(401)上,所述伸缩驱动装置(403)固定在所述竖梁(2)上,所述伸缩驱动装置(403)的伸缩端与所述翻转壳(402)铰接;所述翻转壳(402)的底部外壁和后侧外壁分别连接有所述夹爪装置(5)。
7.根据权利要求6所述的一种基于桁架机械手的柔性抓取机构,其特征在于,所述伸缩驱动装置(403)为气缸。
8.根据权利要求6所述的一种基于桁架机械手的柔性抓取机构,其特征在于,所述夹爪装置(5)包括夹爪(501)和用于驱动所述夹爪(501)开合的夹钳(502),所述夹钳(502)连接在所述翻转壳(402)的外壁,所述夹爪(501)安装在所述夹钳(502)上。
9.根据权利要求8所述的一种基于桁架机械手的柔性抓取机构,其特征在于,所述翻转壳(402)的底部和侧部均连接有所述夹爪装置(5)。
10.一种井下工具的抓取方法,其特征在于,应用如权利要求1至9任一项所述的柔性抓取机构,包括:控制连接机构(3)沿横梁(1)横向移动,带动竖梁(2)以及竖梁(2)底部连接的夹爪装置(5)一起横向移动,控制竖梁(2)沿竖向移动,带动竖梁(2)底部连接的夹爪装置(5)一起竖向移动,当夹爪装置(5)移动到井下工具位置时,通过夹爪装置(5)实现对井下工具抓取。
技术总结
本发明公开了基于桁架机械手的柔性抓取机构及井下工具的抓取方法,柔性抓取机构包括横梁和竖梁,所述横梁和所述竖梁通过连接机构连接,所述连接机构滑动设置在所述横梁上,所述竖梁相对与所述连接机构能够上下滑动;所述竖梁的底部连接有翻转机构,所述翻转机构上连接有用于抓取工件的夹爪装置。本发明能够快速稳定的抓取井下工具生产料件。
技术研发人员:吉效科,曹雷,张利华,见飞龙,刘琪,王泽,马文宗,黎敏,杨亮,倪崇喜
受保护的技术使用者:中国石油天然气股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!