夹持组件的控制方法、装置及机器人与流程
本说明书涉及医疗器械,特别涉及夹持组件的控制方法、装置及机器人。
背景技术:
1、现有技术在控制机器人设备上所安装的夹持组件夹持目标对象时,通常希望夹持组件对于目标对象的夹持力能够快速地达到夹持力的控制目标值,只有达到夹持力的控制目标值,目标对象才不会相对于夹持组件出现滑移现象。
2、然而,现有夹持组件的夹持力达到夹持力控制目标值的所用的时间较长,导致机器人的操作过程较慢。
技术实现思路
1、本技术实施方式的目的是提供一种夹持组件的控制方法、装置及机器人,以解决现有夹持组件的夹持力达到夹持力控制目标值的所用的时间较长的问题。
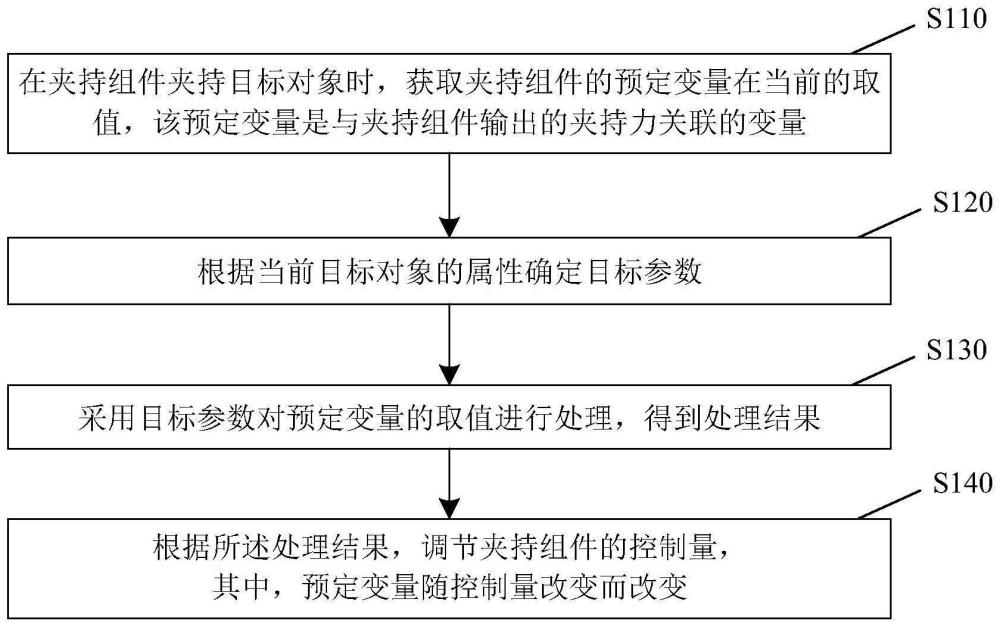
2、本说明书第一方面提供一种夹持组件的控制方法,包括:在夹持组件夹持目标对象时,获取夹持组件的预定变量在当前的取值,所述预定变量是与所述夹持组件输出的夹持力关联的变量;根据当前目标对象的属性确定目标参数;采用目标参数对所述预定变量的取值进行处理,得到处理结果;根据所述处理结果,调节所述夹持组件的输入控制量;其中,所述预定变量随所述输入控制量改变而改变。
3、在一些实施例中,根据当前目标对象的属性确定目标参数,包括:获取夹持组件夹持当前目标对象的当前图像;从所述当前图像中识别出当前目标对象的属性;将当前目标对象的属性输入预先训练的网络模型,得到目标参数。
4、在一些实施例中,所述网络模型通过以下方式训练得到:获取训练样本集,所述训练样本集中包括多个训练样本,每个训练样本包括夹持组件夹持样本对象的样本图像、样本图像对应的样本参数;以所述训练样本集中各训练样本中的样本图像作为所述网络模型的输入、以训练样本的样本参数作为所述网络模型的输出,训练所述网络模型;其中,所述网络模型包括第一子网络和第二子网络,其中,所述第一子网络用于从样本图像中识别出样本对象的属性信息,所述第二子网络用于根据样本对象的属性信息确定目标参数的多个取值以及各取值分别对应的概率。
5、在一些实施例中,根据所述处理结果,在夹持组件夹持目标对象时,获取夹持组件的预定变量在当前的取值,包括:在夹持组件夹持目标对象时,采用目标状态观测器预测夹持组件的预定变量在当前的取值;其中,目标状态观测器是以夹持组件的输入控制量、输出量作为状态观测器的输入,以夹持组件的预定变量作为状态观测器的输出而构造的状态观测器;所述预定变量包括力学量;相应地,所述采用目标参数对所述预定变量的取值进行处理,得到处理结果,包括:将预测得到的预定变量的取值代入预先构造的目标函数,确定所述目数取值最小时的目标输入控制量;所述目标函数是以夹持组件的预定变量、夹持组件的输入控制量为变量构造的。
6、在一些实施例中,目标夹持组件的预定变量包括:目标夹持组件的夹持力。
7、在一些实施例中,在夹持组件夹持目标对象时,采用目标状态观测器预测夹持组件的预定变量在当前的取值,包括:在夹持组件夹持目标对象时,采用第一目标状态观测器预测带动第一夹片活动的第一从动轮的第一输出力矩;其中,所述夹持组件包括第一夹片和第二夹片,所述第一夹片和第二夹片通过转轴连接;采用第二目标状态观测器预测带动第二夹片活动的第二从动轮的第二输出力矩;根据所述第一输出力矩、所述第二输出力矩中的最小值确定夹持组件的夹持力。
8、在一些实施例中,目标夹持组件的预定变量包括:联接主动轮和从动轮的丝线上的拉力;其中,所述从动轮转动时,带动夹持组件的夹片活动。
9、在一些实施例中,所述丝线上的拉力通过以下方式得到:测量在第一丝线中设置的压电材料层的两个表面之间的电压、压电材料层的截面积;根据所述电压、所述截面积计算压电材料层的一个表面的电荷量;根据所述一个表面的电荷量、压电效应系数,计算第一丝线上的拉力。
10、在一些实施例中,夹持组件的预定变量包括:夹持组件夹起目标对象时的静摩擦力。
11、在一些实施例中,所述静摩擦力通过以下方式得到:从夹持组件夹持目标对象的图像中确定夹持组件的延伸方向与水平方向的夹角;所述水平方式是与重力方向垂直的方向;确定目标对象被夹起部分的重力;根据所述目标对象被夹起部分的重力、夹持组件的延伸方向与水平方向的夹角,确定夹持组件与目标对象之间的静摩擦力,并将所述静摩擦力作为夹持组件的一个预定变量。
12、在一些实施例中,在将目标夹持组件的状态量的取值代入目标函数,确定所述目标函数取值最小时的目标输入控制量之前,还包括:实时检测夹持组件是否在执行夹持动作;当检测到正在执行夹持动作时,确定夹持组件对目标对象的夹持状态;所述夹持状态是根据目标对象在夹持组件的夹持面上的覆盖率确定的;在达到预定夹持状态的情况下,执行所述获取夹持组件的预定变量在当前的取值,所述预定变量是与所述夹持组件输出的夹持力关联的变量;否则向操作者呈现提示信息,所述提示信息用于提醒操作者控制夹持组件动作以调整夹持组件对目标对象的夹持状态。
13、本说明书第二方面提供一种夹持组件的控制装置,包括:获取单元,用于在夹持组件夹持目标对象时,获取夹持组件的预定变量在当前的取值,所述预定变量是与所述夹持组件输出的夹持力关联的变量;第一确定单元,用于根据当前目标对象的属性确定目标参数;处理单元,用于采用目标参数对所述预定变量的取值进行处理,得到处理结果;调节单元,用于根据所述处理结果,调节所述夹持组件的输入控制量;其中,所述预定变量随所述输入控制量改变而改变。
14、在一些实施例中,所述第一确定单元包括:获取子单元,用于获取夹持组件夹持当前目标对象的当前图像;识别子单元,用于从所述当前图像中识别出当前目标对象的属性;第一处理子单元,用于将当前目标对象的属性输入预先训练的网络模型,得到目标参数。
15、在一些实施例中,所述网络模型通过以下方式训练得到:获取训练样本集,所述训练样本集中包括多个训练样本,每个训练样本包括夹持组件夹持样本对象的样本图像、样本图像对应的样本参数;以所述训练样本集中各训练样本中的样本图像作为所述网络模型的输入、以训练样本的样本参数作为所述网络模型的输出,训练所述网络模型;其中,所述网络模型包括第一子网络和第二子网络,其中,所述第一子网络用于从样本图像中识别出样本对象的属性信息,所述第二子网络用于根据样本对象的属性信息确定目标参数的多个取值以及各取值分别对应的概率。
16、在一些实施例中,所述获取单元包括:第一预测子单元,用于在夹持组件夹持目标对象时,采用目标状态观测器预测夹持组件的预定变量在当前的取值;其中,目标状态观测器是以夹持组件的输入控制量、输出量作为状态观测器的输入,以夹持组件的预定变量作为状态观测器的输出而构造的状态观测器;所述预定变量包括力学量;相应地,所述处理单元包括:第二处理子单元,用于将预测得到的预定变量的取值代入预先构造的目标函数,确定所述目数取值最小时的目标输入控制量;所述目标函数是以夹持组件的预定变量、夹持组件的输入控制量为变量构造的。
17、在一些实施例中,目标夹持组件的预定变量包括:目标夹持组件的夹持力。
18、在一些实施例中,所述第一预测子单元包括:第二预测子单元,用于在夹持组件夹持目标对象时,采用第一目标状态观测器预测带动第一夹片活动的第一从动轮的第一输出力矩;其中,所述夹持组件包括第一夹片和第二夹片,所述第一夹片和第二夹片通过转轴连接;第三预测子单元,用于采用第二目标状态观测器预测带动第二夹片活动的第二从动轮的第二输出力矩;确定子单元,用于根据所述第一输出力矩、所述第二输出力矩中的最小值确定夹持组件的夹持力。
19、在一些实施例中,目标夹持组件的预定变量包括:联接主动轮和从动轮的丝线上的拉力;其中,所述从动轮转动时,带动夹持组件的夹片活动。
20、在一些实施例中,所述丝线上的拉力通过以下方式得到:测量在第一丝线中设置的压电材料层的两个表面之间的电压、压电材料层的截面积;根据所述电压、所述截面积计算压电材料层的一个表面的电荷量;根据所述一个表面的电荷量、压电效应系数,计算第一丝线上的拉力。
21、在一些实施例中,夹持组件的预定变量包括:夹持组件夹起目标对象时的静摩擦力。
22、在一些实施例中,所述静摩擦力通过以下方式得到:从夹持组件夹持目标对象的图像中确定夹持组件的延伸方向与水平方向的夹角;所述水平方式是与重力方向垂直的方向;确定目标对象被夹起部分的重力;根据所述目标对象被夹起部分的重力、夹持组件的延伸方向与水平方向的夹角,确定夹持组件与目标对象之间的静摩擦力,并将所述静摩擦力作为夹持组件的一个预定变量。
23、在一些实施例中,所述方法还包括:检测单元,用于实时检测夹持组件是否在执行夹持动作;第二确定单元,用于当检测到正在执行夹持动作时,确定夹持组件对目标对象的夹持状态;所述夹持状态是根据目标对象在夹持组件的夹持面上的覆盖率确定的;在达到预定夹持状态的情况下,执行所述获取夹持组件的预定变量在当前的取值,所述预定变量是与所述夹持组件输出的夹持力关联的变量;提示单元,用于在未达到预定夹持状态的情况下,向操作者呈现提示信息,所述提示信息用于提醒操作者控制夹持组件动作以调整夹持组件对目标对象的夹持状态。
24、本说明书第三方面提供一种机器人,包括:基座;第一机械臂,设置在所述基座上;夹持组件,设置在所述第一机械臂的末端;调整组件,设置在所述夹持组件上,用于调整夹持组件的夹持力;控制器,用于在夹持组件夹持目标对象时,获取夹持组件的预定变量在当前的取值,所述预定变量是与所述夹持组件输出的夹持力关联的变量;根据当前目标对象的属性确定目标参数;采用目标参数对所述预定变量的取值进行处理,得到处理结果;根据所述处理结果,调节所述夹持组件的输入控制量;其中,所述预定变量随所述输入控制量改变而改变。
25、本说明书第四方面提供一种控制器,包括:存储器和处理器,所述处理器和所述存储器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而实现第一方面任一项所述方法的步骤。
26、本说明书第五方面提供一种计算机存储介质,所述计算机存储介质存储有计算机程序指令,所述计算机程序指令被执行时实现第一方面任一项所述方法的步骤。
27、本说明书所提供的夹持组件的控制方法、装置及机器人,对夹持组件的输出的夹持关联的变量,采用参数进行处理,根据处理结果条件夹持组件的控制量,也即,采用了反馈控制方式对夹持组件的夹持力进行控制;反馈控制的参数根据目标对象的属性来确定,能够提高反馈控制的收敛速度及精度(也即,使得夹持力快速接近控制目标值),提高控制效率。
- 还没有人留言评论。精彩留言会获得点赞!