一种基于激光雷达与视觉融合的电力机器人的视觉装置的制作方法
1.本发明涉及视觉装置技术领域,具体为一种基于激光雷达与视觉融合的电力机器人的视觉装置。
背景技术:
2.近年来,随着我国“智能电网”的不断发展,电力巡检机器人的应用也越来越广泛,电力巡检机器人能够取代传统的人工巡检,适应许多人类无法完成的工作,例如可以在恶劣的户外环境中使用,靠近上万伏的高电压。变电站是电网的重要组成部分,为了保证电网系统安全稳定运行,需对站内电器设备进行定时检验。传统采用人力进行巡检的方法,不仅费时费力,而且许多变电站都修建在偏远的郊区,室外环境的高电压、高辐射,会对巡检人员的安全造成巨大的威胁。因此,电力巡检机器人应运而生,现有电力巡检机器人采用自动控制,在遇到障碍物时能够通过激光雷达自行判断转向,灵活性强,同时随着传感器技术及处理器技术的发展,机器人技术朝着越来越智能化的方向发展。计算机视觉理论的形成和发展,让机器人具备了类似人类双眼的视觉系统,让机器人可以根据视觉系统得更多的环境信息,视觉导航技术主要包括基于单目的、基于双目立体视觉的、三目及多目摄像机结构,目前,电力机器人会搭载视觉相机和激光雷达,如现有专利(公开号:cn108214487b)公开的一种基于双目视觉和激光雷达的机器人目标定位和抓取方法中,就公开了基于双目视觉和激光雷达的机器人。
3.但是现有的电力机器人上的视觉装置,在使用时,一般是一直暴露在外界的,镜头长期使用,会粘附灰尘,下雨时,也会附上雨滴,影响视觉效果。
技术实现要素:
4.本发明的目的在于提供一种基于激光雷达与视觉融合的电力机器人的视觉装置,以解决背景技术中所提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于激光雷达与视觉融合的电力机器人的视觉装置,包括电力机器人,所述电力机器人下部两侧的前后两侧均设置有行走轮,所述电力机器人上设置有视觉装置,所述视觉装置的顶部设置有安装座,所述安装座的内部设置有清理片,所述安装座的两侧均设置有插座,两个所述插座水平方向的朝内一侧分别与安装座的两侧连通,所述插座内部的顶侧固定安装有弹性件,所述弹性件的底部设置有连接杆,所述连接杆的底端与其中一个行走轮外侧的一端转动连接,所述连接杆的顶端通过连接组件与相应清理片的一侧固定连接,所述安装座的底部为开口,清理片的位置与视觉装置的镜头位置相对应。
6.作为本发明的一种优选实施方式,所述弹性件为弹簧。
7.作为本发明的一种优选实施方式,所述连接组件包括丝杆升降驱动装置,所述连接杆的底顶端朝水平方向的朝内一侧延申,且通过轴承与丝杆升降驱动装置的一侧转动连接,所述丝杆升降驱动装置的输出端设置有连接杆二,所述连接杆二的另一端与清理片连
接。
8.作为本发明的一种优选实施方式,所述连接杆的底端朝水平方向的朝内一侧延申,且通过轴承转动安装有连接座,所述连接座固定安装在相应行走轮的表面。
9.作为本发明的一种优选实施方式,所述插座内腔侧面的两侧均从上往下向外倾斜。
10.与现有技术相比,本发明提供了一种基于激光雷达与视觉融合的电力机器人的视觉装置,具备以下有益效果:
11.该一种基于激光雷达与视觉融合的电力机器人的视觉装置,通过设置的插座、连接杆、弹簧和清理片,在使用时,当电力机器人行走时,可以通过连接杆带动清理片上下移动,从而实现对视觉装置镜片的清理,相较于现有技术,本发明可以使得视觉装置模拟眼睛眨动,对视觉装置镜片上战粘附的灰尘、水渍等进行处理,实现保证视觉装置的运行,使用效果极佳。
附图说明
12.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
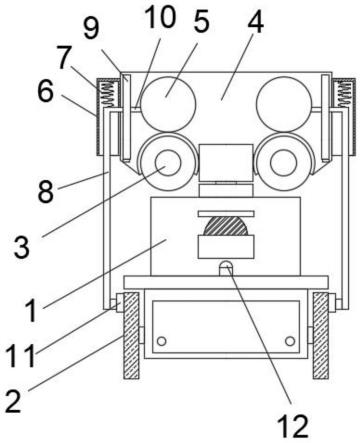
13.图1为本发明一种基于激光雷达与视觉融合的电力机器人的视觉装置的主视图;
14.图2为本发明一种基于激光雷达与视觉融合的电力机器人的视觉装置的插座侧视图剖面示意图。
15.图中:1、电力机器人;2、行走轮;3、视觉装置;4、安装座;5、清理片;6、插座;7、弹性件;8、连接杆;9、丝杆升降驱动装置;10、连接杆二;11、连接座;12、激光雷达。
具体实施方式
16.为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明一种基于激光雷达与视觉融合的电力机器人的视觉装置做进一步详细的描述。
17.如图1-图2所示,本发明提供一种技术方案:一种基于激光雷达与视觉融合的电力机器人的视觉装置,包括电力机器人1,所述电力机器人1下部两侧的前后两侧均设置有行走轮2,所述电力机器人1上设置有视觉装置3,视觉装置3为双目相机,电力机器人1上还搭载有激光雷达12,所述视觉装置3的顶部设置有安装座4,所述安装座4的内部设置有清理片5,所述安装座4的两侧均设置有插座6,两个所述插座6水平方向的朝内一侧分别与安装座4的两侧连通,所述插座6内部的顶侧固定安装有弹性件7,所述弹性件7的底部设置有连接杆8,所述连接杆8的底端与其中一个行走轮2外侧的一端转动连接,所述连接杆8的顶端通过连接组件与相应清理片5的一侧固定连接,所述安装座4的底部为开口,清理片5的位置与视觉装置3的镜头位置相对应,当电力机器人1通过行走轮2进行行走时,行走轮2通过连接杆8带动清理片5穿过安装座4的底部,对视觉装置3镜片进行清理。
18.本实施例中,所述弹性件7为弹簧。
19.本实施例中,所述连接组件包括丝杆升降驱动装置9,所述连接杆8的底顶端朝水平方向的朝内一侧延申,且通过轴承与丝杆升降驱动装置9的一侧转动连接,所述丝杆升降驱动装置9的输出端设置有连接杆二10,所述连接杆二10的另一端与清理片5连接,丝杆升
降驱动装置9可以实现清理片5的升降,以便于在电力机器人1不通过行走轮2进行行走时,也可以通过利用清理片5对视觉装置3进行清理。
20.本实施例中,所述连接杆8的底端朝水平方向的朝内一侧延申,且通过轴承转动安装有连接座11,所述连接座11固定安装在相应行走轮2的表面。
21.本实施例中,所述插座6内腔侧面的两侧均从上往下向外倾斜。
22.可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本发明所保护的范围内。
技术特征:
1.一种基于激光雷达与视觉融合的电力机器人的视觉装置,包括电力机器人,所述电力机器人下部两侧的前后两侧均设置有行走轮,所述电力机器人上设置有视觉装置,其特征在于:所述视觉装置的顶部设置有安装座,所述安装座的内部设置有清理片,所述安装座的两侧均设置有插座,两个所述插座水平方向的朝内一侧分别与安装座的两侧连通,所述插座内部的顶侧固定安装有弹性件,所述弹性件的底部设置有连接杆,所述连接杆的底端与其中一个行走轮外侧的一端转动连接,所述连接杆的顶端通过连接组件与相应清理片的一侧固定连接,所述安装座的底部为开口,清理片的位置与视觉装置的镜头位置相对应。2.根据权利要求1所述的一种基于激光雷达与视觉融合的电力机器人的视觉装置,其特征在于:所述弹性件为弹簧。3.根据权利要求2所述的一种基于激光雷达与视觉融合的电力机器人的视觉装置,其特征在于:所述连接组件包括丝杆升降驱动装置,所述连接杆的底顶端朝水平方向的朝内一侧延申,且通过轴承与丝杆升降驱动装置的一侧转动连接,所述丝杆升降驱动装置的输出端设置有连接杆二,所述连接杆二的另一端与清理片连接。4.根据权利要求3所述的一种基于激光雷达与视觉融合的电力机器人的视觉装置,其特征在于:所述连接杆的底端朝水平方向的朝内一侧延申,且通过轴承转动安装有连接座,所述连接座固定安装在相应行走轮的表面。5.根据权利要求4所述的一种基于激光雷达与视觉融合的电力机器人的视觉装置,其特征在于:所述插座内腔侧面的两侧均从上往下向外倾斜。
技术总结
本发明涉及视觉装置技术领域,公开了一种基于激光雷达与视觉融合的电力机器人的视觉装置,包括电力机器人,所述电力机器人下部两侧的前后两侧均设置有行走轮,所述电力机器人上设置有视觉装置,所述视觉装置的顶部设置有安装座,所述安装座的内部设置有清理片,所述安装座的两侧均设置有插座。本发明通过设置的插座、连接杆、弹簧和清理片,在使用时,当电力机器人行走时,可以通过连接杆带动清理片上下移动,从而实现对视觉装置镜片的清理,相较于现有技术,本发明可以使得视觉装置模拟眼睛眨动,对视觉装置镜片上战粘附的灰尘、水渍等进行处理,实现保证视觉装置的运行,使用效果极佳。佳。佳。
技术研发人员:姬会东
受保护的技术使用者:苏州阿古斯智能科技有限公司
技术研发日:2022.08.16
技术公布日:2022/11/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1