适用于中后桥传动轴的移载夹具及其控制方法与流程
本发明涉及机器人手臂,具体地,涉及一种适用于中后桥传动轴的移载夹具及其控制方法,尤其是适用于中后桥传动轴省力搬运专用移载夹具。
背景技术:
1、现有技术亟需一种能够适用于中后桥传动轴省力搬运专用移载夹具。
2、专利文献cn102649274a公开了工件移载夹具,包括作用于工件表面的吸盘,以及设置于吸盘上、用于控制工件运转的手柄,吸盘包括吸盘基体和密封垫,吸盘基体上集成有接管头和气控阀,吸盘基体通过接管头和气控阀连接真空发生设备。上述专利公开的工件移载装置,包括起吊装置和如上的工件移载夹具,吊装组件用于连接起吊装置,控制手柄用于控制起吊装置转运工件。上述专利并不能很好地适用于中后桥传动轴省力搬运的应用场景。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种适用于中后桥传动轴的移载夹具及其控制方法。
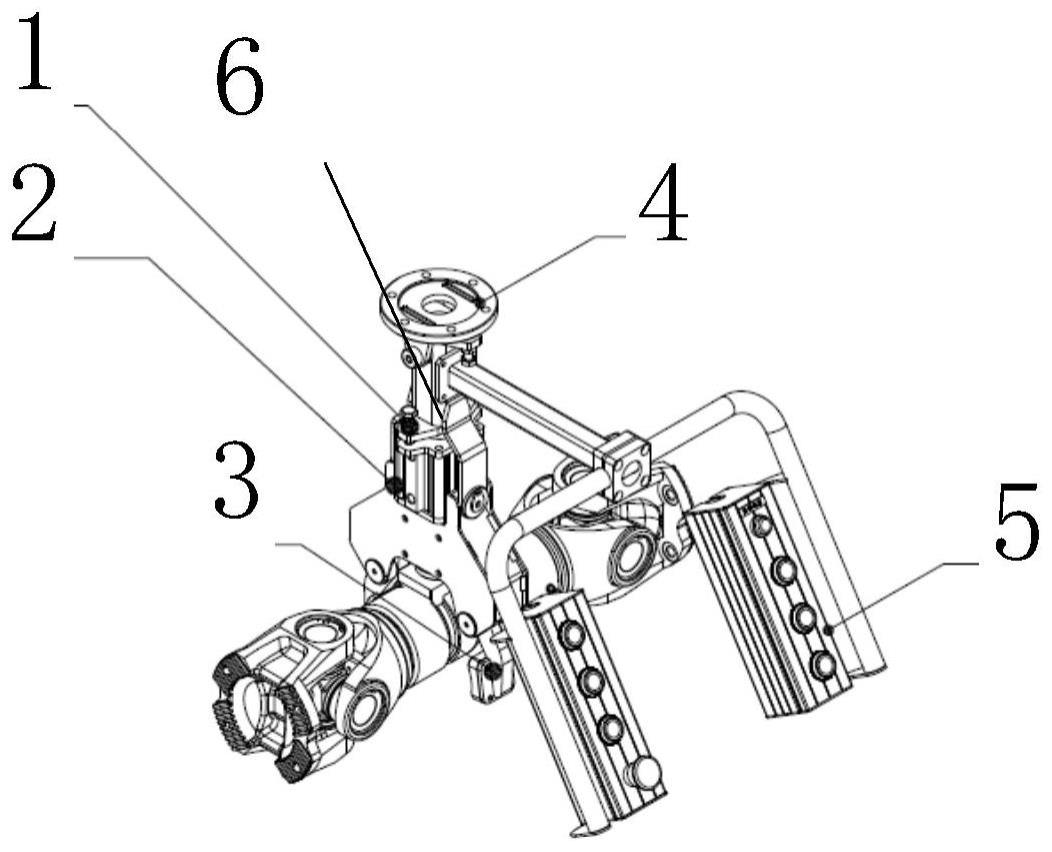
2、根据本发明提供的一种适用于中后桥传动轴的移载夹具,包括:摆动限位部件1、夹紧气缸2、夹爪部件3、连接法兰部件4、操作手柄部件5以及移载夹具本体6;所述摆动限位部件1、夹紧气缸2、夹爪部件3、连接法兰部件4、操作手柄部件5设置于移载夹具本体6上;所述连接法兰部件4设置于移载夹具本体6的上部;所述摆动限位部件1设置于连接法兰部件4的下方;所述夹紧气缸2设置于摆动限位部件1的下方;所述夹爪部件3设置于移载夹具本体6的下部;所述操作手柄部件5与移载夹具本体6相连接。
3、优选地,所述夹爪部件3包括:夹爪上连接部31、夹爪中部32以及夹持部33;所述夹爪上连接部31设置于夹爪部件3的上部;所述夹爪中部32与夹爪上连接部31相连接;所述夹持部33与夹爪中部32相连接。
4、优选地,所述夹持部33包括:第一夹持部、第二夹持部;所述第一夹持部、第二夹持部对称设置;所述第一夹持部、第二夹持部分别与夹爪中部32相连。
5、优选地,所述夹爪部件3包括:-夹紧状态;-张开状态。
6、优选地,还包括:中臂杆71、轨道部件72、小车部件73、电控箱部件74以及主机部件75;所述中臂杆71通过连接法兰部件4与移载夹具本体6相连;所述电控箱部件74与主机部件75电相连;所述电控箱部件74与小车部件73电相连;所述小车部件73能够沿设定轨道运动于轨道部件72上;所述中臂杆71与主机部件75相连。
7、优选地,还包括:所述夹爪部件3包括:负载侦测部件;所述负载侦测部件能够侦测工件被提起的状况。
8、优选地,还包括:负载显示器;所述负载显示器与负载侦测部件电连接。
9、根据本发明提供的一种移载夹具的控制方法,采用适用于中后桥传动轴的移载夹具,包括:步骤s1:根据操作手柄输入信息,获取夹爪控制信息;所述夹爪控制信息指导夹爪部件3的夹取行为;步骤s2:根据夹爪控制信息,判断工件是否被提起;若是,则获取工件提起确认信息;若否,则获取工件未提起确认信息;步骤s3:根据工件提起确认信息,获取负载显示器警告信息。
10、优选地,所述夹爪控制信息包括:第一夹爪控制信息、第二夹爪控制信息;所述步骤s1包括:步骤s1.1:根据第一夹爪控制信息,将夹爪部件3调整为水平状态;步骤s1.2:根据第二夹爪控制信息,将夹爪部件3调整为竖直状态。
11、本发明的积极进步效果在于:
12、1、本发明结构合理,使用方便,能够克服现有技术的缺陷;
13、2、本发明具有刚性结构保持工件水平平衡,使得物料的移载轻松、快捷;
14、3、本发明采用动力夹持式夹具,能够实现工件的夹取动作。
技术特征:
1.一种适用于中后桥传动轴的移载夹具,其特征在于,包括:摆动限位部件(1)、夹紧气缸(2)、夹爪部件(3)、连接法兰部件(4)、操作手柄部件(5)以及移载夹具本体(6);
2.根据权利要求1所述的适用于中后桥传动轴的移载夹具,其特征在于,所述夹爪部件(3)包括:夹爪上连接部(31)、夹爪中部(32)以及夹持部(33);
3.根据权利要求2所述的适用于中后桥传动轴的移载夹具,其特征在于,所述夹持部(33)包括:第一夹持部、第二夹持部;
4.根据权利要求1所述的适用于中后桥传动轴的移载夹具,其特征在于,所述夹爪部件(3)包括:
5.根据权利要求1所述的适用于中后桥传动轴的移载夹具,其特征在于,还包括:中臂杆(71)、轨道部件(72)、小车部件(73)、电控箱部件(74)以及主机部件(75);
6.根据权利要求1所述的适用于中后桥传动轴的移载夹具,其特征在于,还包括:所述夹爪部件(3)包括:负载侦测部件;
7.根据权利要求6述的适用于中后桥传动轴的移载夹具,其特征在于,还包括:负载显示器;
8.一种移载夹具的控制方法,其特征在于,采用权利要求1-7任意一项所述的适用于中后桥传动轴的移载夹具,包括:
9.根据权利要求8所述的一种移载夹具的控制方法,其特征在于,所述夹爪控制信息包括:第一夹爪控制信息、第二夹爪控制信息;
技术总结
本发明提供了一种适用于中后桥传动轴的移载夹具及其控制方法,包括:摆动限位部件、夹紧气缸、夹爪部件、连接法兰部件、操作手柄部件以及移载夹具本体;所述摆动限位部件、夹紧气缸、夹爪部件、连接法兰部件、操作手柄部件设置于移载夹具本体上;所述连接法兰部件设置于移载夹具本体的上部;所述摆动限位部件设置于连接法兰部件的下方;所述夹紧气缸设置于摆动限位部件的下方;所述夹爪部件设置于移载夹具本体的下部;所述操作手柄部件与移载夹具本体相连接。本发明结构合理,使用方便,能够克服现有技术的缺陷。本发明具有刚性结构保持工件水平平衡,使得物料的移载轻松、快捷。本发明采用动力夹持式夹具,能够实现工件的夹取动作。
技术研发人员:胡义军
受保护的技术使用者:力孚特(上海)智能科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!