一种移动机器人的控制方法、装置及移动机器人与流程
本申请涉及自动控制,尤其是涉及一种移动机器人的控制方法、装置及移动机器人。
背景技术:
1、近年来,各种类型的移动机器人,在技术和市场方面发展迅速,移动机器人是自动执行工作的机器装置,是依靠自身动力和控制能力来实现各种功能的机器。移动机器人可以接受人类指挥,可以运行预先编排的程序,还可以根据以人工智能制定的策略行动。比如说,用户使用手动遥控器控制移动机器人执行相关操作,如手动遥控器通过无线方式向移动机器人下发操作命令,移动机器人接收到操作命令后,执行该操作命令指定的操作,完成相关功能。
2、在移动机器人从起始位置点移动到终止位置点时,需要用户为移动机器人规划一条从起始位置点移动到终止位置点的行驶路线,将行驶路线提供给移动机器人,继而基于该行驶路线控制移动机器人从起始位置点移动到终止位置点。
3、但是,由用户规划行驶路线,需要额外增加用户工作量,由于用户经验等原因导致行驶路线不是最优行驶路线,移动机器人的控制效果较差。
技术实现思路
1、本申请提供一种移动机器人的控制方法,所述方法包括:
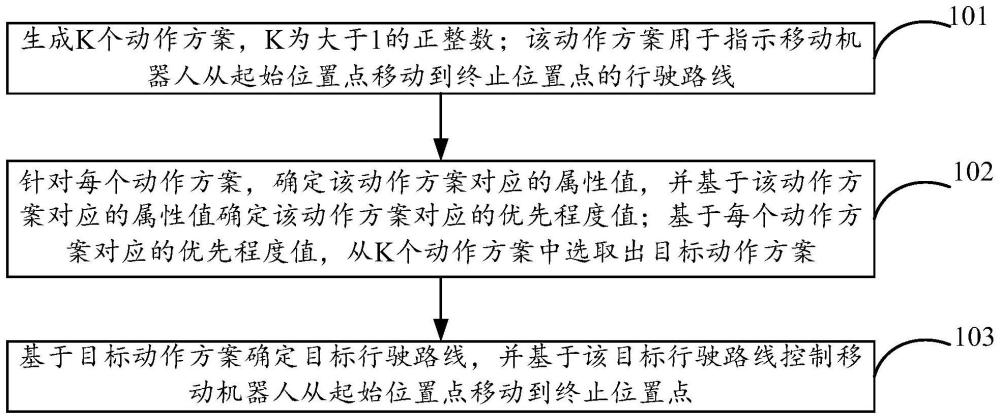
2、生成k个动作方案,k为大于1的正整数;所述动作方案用于指示所述移动机器人从起始位置点移动到终止位置点的行驶路线;
3、针对每个动作方案,确定所述动作方案对应的属性值,并基于所述动作方案对应的属性值确定所述动作方案对应的优先程度值;基于每个动作方案对应的优先程度值,从所述k个动作方案中选取出目标动作方案;
4、基于所述目标动作方案确定目标行驶路线,并基于所述目标行驶路线控制所述移动机器人从所述起始位置点移动到所述终止位置点。
5、本申请提供一种移动机器人的控制装置,所述装置包括:
6、生成模块,用于生成k个动作方案,k大于1;所述动作方案用于指示所述移动机器人从起始位置点移动到终止位置点的行驶路线;
7、确定模块,用于针对每个动作方案,确定所述动作方案对应的属性值,并基于所述动作方案对应的属性值确定所述动作方案对应的优先程度值;基于每个动作方案对应的优先程度值,从所述k个动作方案中选取出目标动作方案;
8、控制模块,用于基于所述目标动作方案确定目标行驶路线,并基于所述目标行驶路线控制所述移动机器人从所述起始位置点移动到所述终止位置点。
9、本申请提供一种移动机器人,包括:处理器和机器可读存储介质,所述机器可读存储介质存储有能够被所述处理器执行的机器可执行指令;所述处理器用于执行机器可执行指令,以实现本申请实施例的移动机器人的控制方法。
10、由以上技术方案可见,本申请实施例中,移动机器人可以自动生成多个动作方案,每个动作方案均用于指示从起始位置点移动到终止位置点的行驶路线,基于每个动作方案对应的属性值从所有动作方案中选取出目标动作方案,并确定目标动作方案对应的目标行驶路线,基于目标行驶路线控制移动机器人从起始位置点移动到终止位置点,从而能够得到最优行驶路线,移动机器人的控制效果较好,且不需要由用户规划行驶路线,不需要额外增加用户工作量。每个动作方案对应的属性值可以是花费总时间、最近障碍物距离、最大偏移距离、动作个数等,从而综合考虑花费总时间、最近障碍物距离、最大偏移距离、动作个数等属性,使移动机器人完成移动的目标行驶路线更加合理。
技术特征:
1.一种移动机器人的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求1所述的方法,其特征在于,所述属性值包括以下至少一种:花费总时间、最近障碍物距离、最大偏移距离、动作个数;
4.根据权利要求3所述的方法,其特征在于,
5.根据权利要求1所述的方法,其特征在于,所述基于所述动作方案对应的属性值确定所述动作方案对应的优先程度值,包括:
6.根据权利要求1-5任一项所述的方法,其特征在于,
7.根据权利要求6所述的方法,其特征在于,所述代价值包括时间代价值和动能代价值;所述确定每个货架旋转方案对应的代价值,包括:
8.一种移动机器人的控制装置,其特征在于,所述装置包括:
9.根据权利要求8所述的装置,其特征在于,
10.一种移动机器人,其特征在于,包括:处理器和机器可读存储介质,所述机器可读存储介质存储有能够被所述处理器执行的机器可执行指令;所述处理器用于执行机器可执行指令,以实现权利要求1-7任一项所述的方法步骤。
技术总结
本申请提供一种移动机器人的控制方法、装置及移动机器人,该方法包括:生成K个动作方案,K为大于1的正整数;所述动作方案用于指示所述移动机器人从起始位置点移动到终止位置点的行驶路线;针对每个动作方案,确定所述动作方案对应的属性值,并基于所述动作方案对应的属性值确定所述动作方案对应的优先程度值;基于每个动作方案对应的优先程度值,从所述K个动作方案中选取出目标动作方案;基于所述目标动作方案确定目标行驶路线,并基于所述目标行驶路线控制所述移动机器人从所述起始位置点移动到所述终止位置点。通过本申请的技术方案,能够使移动机器人完成移动的目标行驶路线更加合理,移动机器人的控制效果较好。
技术研发人员:李家宸
受保护的技术使用者:杭州海康机器人股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!