一种驱动轴的控制方法、装置、电子设备以及存储介质与流程
本发明涉及飞机数字化装配,尤其涉及一种驱动轴的控制方法、装置、电子设备以及存储介质。
背景技术:
1、在飞机数字化装配系统中,装配部件的姿态调整,一般由多个定位器在航向方向、展向方向以及重力方向的协同运动实现。
2、目前常用的各定位器驱动轴的组成形式,主要包括主从形式、主动轴+浮动轴形式以及全主动形式。主从形式是对于4个定位器,一个定位器设置三个方向上的主动轴,一个定位器设置重力以及展向方向的主动轴,两个定位器设置重力方向的主动轴。这种主从形式在航向方向上只有一个主动轴,从动轴侧的驱动会买,明显滞后于主动轴。主动轴+浮动轴形式是对于四个定位器,一个定位器设置三个方向上的主动轴,一个定位器设置重力方向的主动轴,以及可以主从切换的浮动轴,一个定位器设置重力以及展向方向的主动轴,一个定位器设置重力方向的主动轴。这种方式中浮动轴的主从切换机构较为复杂,设置和维护成本较高。全主动形式是对于4个定位器,均设置三个方向上的主动轴,这种形式容易产生较大的附加力,并且协调控制方式较为复杂。
技术实现思路
1、本发明提供了一种驱动轴的控制方法、装置、电子设备以及存储介质,以实现定位器主从动轴的自由切换,增加定位器的柔性,更好的满足姿态调整对接的要求。
2、第一方面,本发明实施例提供了一种驱动轴的控制方法,该方法包括:
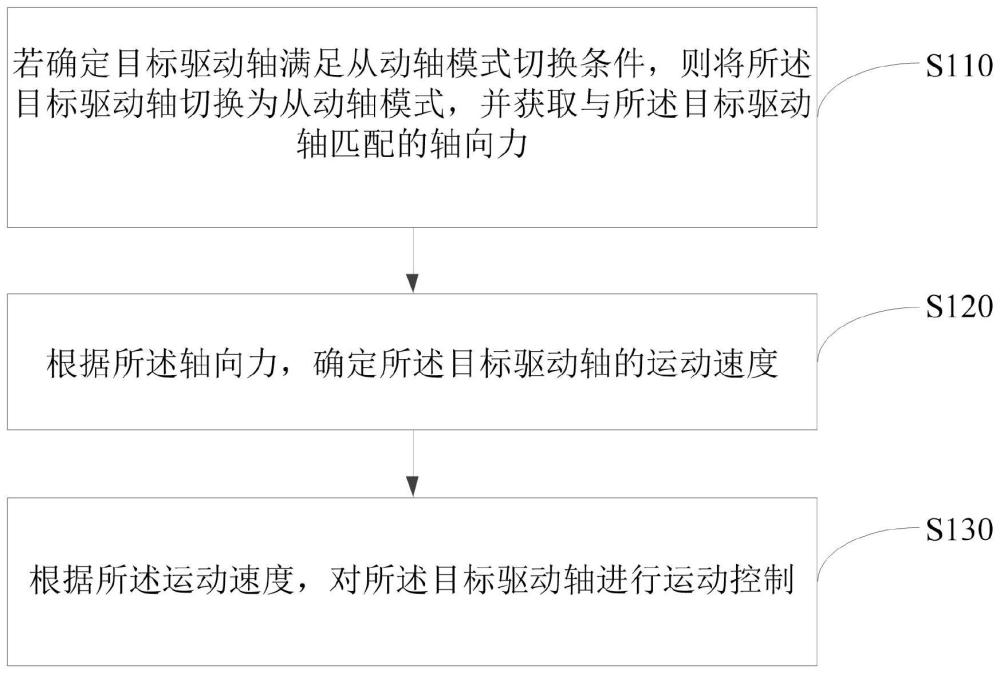
3、若确定目标驱动轴满足从动轴模式切换条件,则将所述目标驱动轴切换为从动轴模式,并获取与所述目标驱动轴匹配的轴向力;
4、其中,切换为从动轴模式的目标驱动轴跟随主动轴进行运动;
5、根据所述轴向力,确定所述目标驱动轴的运动速度;
6、根据所述运动速度,对所述目标驱动轴进行运动控制。
7、第二方面,本发明实施例还提供了一种驱动轴的控制装置,该装置包括:
8、从动轴模式切换模块,用于若确定目标驱动轴满足从动轴模式切换条件,则将所述目标驱动轴切换为从动轴模式,并获取与所述目标驱动轴匹配的轴向力;其中,切换为从动轴模式的目标驱动轴跟随主动轴进行运动。
9、运动速度确定模块,用于根据所述轴向力,确定所述目标驱动轴的运动速度。
10、第一运动控制模块,用于根据所述运动速度,对所述目标驱动轴进行运动控制。
11、第三方面,本发明实施例还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本发明实施例中任一所述的一种驱动轴的控制方法。
12、第四方面,本发明实施例还提供了一种存储计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如本发明实施例中任一所述的一种驱动轴的控制方法。
13、本发明实施例的技术方案,通过若确定目标驱动轴满足从动轴模式切换条件,则将所述目标驱动轴切换为从动轴模式,并获取与所述目标驱动轴匹配的轴向力;其中,切换为从动轴模式的目标驱动轴跟随主动轴进行运动;根据所述轴向力,确定所述目标驱动轴的运动速度;根据所述运动速度,对所述目标驱动轴进行运动控制。本技术方案,实现了定位器主从动轴的自由切换,增加了定位器的柔性,更好的满足了姿态调整对接的要求。
14、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种驱动轴的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,根据所述轴向力,确定所述目标驱动轴的运动速度,包括:
3.根据权利要求2所述的方法,其特征在于,根据所述轴向力和比例积分微分控制算法,确定所述目标驱动轴的运动速度,包括:
4.根据权利要求1所述的方法,其特征在于,根据所述轴向力,确定所述目标驱动轴的运动速度,还包括:
5.根据权利要求1所述的方法,其特征在于,根据所述轴向力,确定所述目标驱动轴的运动速度,还包括:
6.根据权利要求1所述的方法,其特征在于,所述方法,还包括:
7.根据权利要求1所述的方法,其特征在于,所述目标驱动轴为航向方向和/或展向方向的主动轴。
8.一种驱动轴的控制装置,其特征在于,包括:
9.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7中任一所述的一种驱动轴的控制方法。
10.一种存储计算机可执行指令的存储介质,其特征在于,所述计算机可执行指令在由计算机处理器执行时用于执行如权利要求1-7中任一所述的一种驱动轴的控制方法。
技术总结
本发明公开了一种驱动轴的控制方法、装置、电子设备以及存储介质。该方法通过若确定目标驱动轴满足从动轴模式切换条件,则将所述目标驱动轴切换为从动轴模式,并获取与所述目标驱动轴匹配的轴向力;其中,切换为从动轴模式的目标驱动轴跟随主动轴进行运动;根据所述轴向力,确定所述目标驱动轴的运动速度;根据所述运动速度,对所述目标驱动轴进行运动控制。本技术方案,实现了定位器主从动轴的自由切换,增加了定位器的柔性,更好的满足了姿态调整对接的要求。
技术研发人员:甘海云,刘伦乾,王扬洲,刘民才,杨忠安,孙照宇,王思知,丁行稳,陈麒
受保护的技术使用者:上海飞机制造有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!