机械臂结构及机器人的制作方法
本发明涉及机器人,特别是涉及一种机械臂结构及机器人。
背景技术:
1、协作机器人用于在工业生产中辅助或者代替人工作业,从而提高作业效率。机械臂作为协作机器人的重要组成部件,在机械臂上安装水平关节模组和竖直关节模组,从而带动机械臂沿水平方向和竖直方向转动,进而带动机械手定位某一点进行作业。现有的机械臂采用铝合金翻砂铸造或者重力铸造一体成型制造,其通常呈空心圆管状,结构强度低,在机械臂运动过程中受力容易产生形变。
技术实现思路
1、基于此,有必要针对机械臂结构强度低的问题,提供一种机械臂结构。
2、一种机械臂结构,包括:
3、主体,其上贯穿设置有第一安装孔和第二安装孔,且所述第一安装孔的轴线方向和所述第二安装孔的轴线方向呈夹角,所述第一安装孔用于安装第一关节模组,所述第二安装孔用于安装第二关节模组;
4、第一盖体,能够盖合于所述主体,所述主体朝向所述第一盖体的一侧设置有第一腔体;
5、多组第一加强筋组件,设置于所述第一腔体内且连接于所述第一腔体的腔壁,所述第一加强筋组件包括四个第一加强筋和一个第二加强筋,四个所述第一加强筋在所述主体和所述第一盖体排布方向上的投影围成四边形,所述第二加强筋在所述主体和所述第一盖体排布方向上的投影,连接于所述四边形相对设置的两个顶点之间,任意两组所述第一加强筋组件和所述腔壁围成三角形。
6、在其中一个实施例中,所述主体包括:
7、第一固定部,其上设置有所述第一腔体,所述第一盖体能够盖合连接于所述第一固定部,所述第一固定部上贯穿设置有与所述第一腔体连通的所述第一安装孔,所述第一安装孔的轴线方向与所述第一盖体和所述第一固定部的排布方向平行;
8、第二固定部,呈夹角连接于所述第一固定部,所述第二固定部上贯穿设有与所述第一腔体连通的所述第二安装孔,所述第二安装孔的轴线方向垂直于所述第一盖体和所述第一固定部的排布方向。
9、在其中一个实施例中,还包括第二盖体,所述第二盖体连接于所述第二固定部,所述第二盖体用于封堵所述第二安装孔的一端的开口。
10、在其中一个实施例中,还包括锁紧件,所述第二盖体上嵌设有密封垫,所述锁紧件穿过所述密封垫螺纹连接于所述第二固定部,以锁紧所述第二盖体和所述第二固定部。
11、在其中一个实施例中,所述第二固定部呈l形,所述第二固定部自所述第一固定部背离所述第一盖体的一侧沿所述排布方向向背离第一盖体的方向延伸后,沿垂直于所述排布方向向背离所述第一安装孔的方向延伸。
12、在其中一个实施例中,所述第一腔体内设置有与所述第一加强筋组件和所述第一腔体的腔壁连接的限位环,且所述限位环位于所述第一安装孔和所述第二安装孔之间,所述限位环用于供线束穿过。
13、在其中一个实施例中,还包括安装部和固定件,所述安装部从所述第二加强筋上朝外凸出,所述固定件包括连接部以及u形的夹紧部,所述夹紧部用于固定依次穿过所述第一腔体的线束,所述连接部穿过所述夹紧部并插接于所述安装部。
14、在其中一个实施例中,所述第一盖体朝向所述主体的一侧设置有沿所述第一盖体的周向延伸的凸起部,所述第一盖体和所述凸起部之间围设形成第二腔体;
15、所述机械臂结构还包括连接于所述第二腔体的腔壁的第二加强筋组件,所述第二加强筋组件包括第三加强筋和第四加强筋,所述第三加强筋和所述第四加强筋呈十字交叉状设置于所述第二腔体内。
16、在其中一个实施例中,还包括连接件,所述连接件依次穿过所述第一盖体和所述主体,并螺纹连接于所述主体,以连接所述第一盖体和所述主体,所述连接件设置有多个,多个所述连接件沿所述第一盖体的周向分布。
17、本发明还提供了一种机器人,包括第一关节模组、第二关节模组和上述所述的机械臂结构,所述第一关节模组连接于所述第一安装孔的孔壁,所述第二关节模组连接于所述第二安装孔的孔壁。
18、本发明的有益效果:
19、上述机械臂结构,采用分体式结构,包括主体和盖合连接于主体的第一盖体,在主体上设置有第一安装孔和第二安装孔,且第一安装孔的轴线方向和第二安装孔的轴线方向呈夹角,将第一关节模组连接于第一安装孔的孔壁,第二关节模组连接于第二安装孔的孔壁,从而使安装在主体上的第一关节模组的轴线方向和第二关节模组的轴线方向呈夹角,通过第一关节模组运动带动主体和第一盖体沿第一安装孔的轴线方向运动,通过第二关节模组运动带动主体和第一盖体沿第二安装孔的轴线方向运动。在主体的第一腔体内设置多组第一加强筋组件,增加主体的结构强度,增加机械臂整体的结构强度。第一加强筋组件包括四个第一加强筋和一个第二加强筋,四个第一加强筋在主体和第一盖体排布方向上的投影围成四边形,也就是说四个第一加强筋连接形成四边体,第二加强筋在主体和第一盖体排布方向上的投影,连接于四边形相对设置的两个顶点之间,即第二加强筋连接于四边体相对设置的两条边,第二加强筋将四边体分割形成两个三角形,而且任意两组第一加强筋组件和第一腔体的腔壁围成三角形。多组第一加强筋组件设置于第一腔体内,形成多个三角形,三角形具有稳定性,进一步增强了主体的结构强度。相比于一体成型设置的空心机械臂结构,本发明提供的机械臂结构,采用分体结构,在主体上设置第一加强筋组件,增加主体的结构强度,减小机械臂在运动过程中受力产生的形变,而且多个第一加强筋组件在第一腔体内形成多个三角形,增加了主体的结构稳定性。
技术特征:
1.一种机械臂结构,其特征在于,包括:
2.根据权利要求1所述的机械臂结构,其特征在于,所述主体(100)包括:
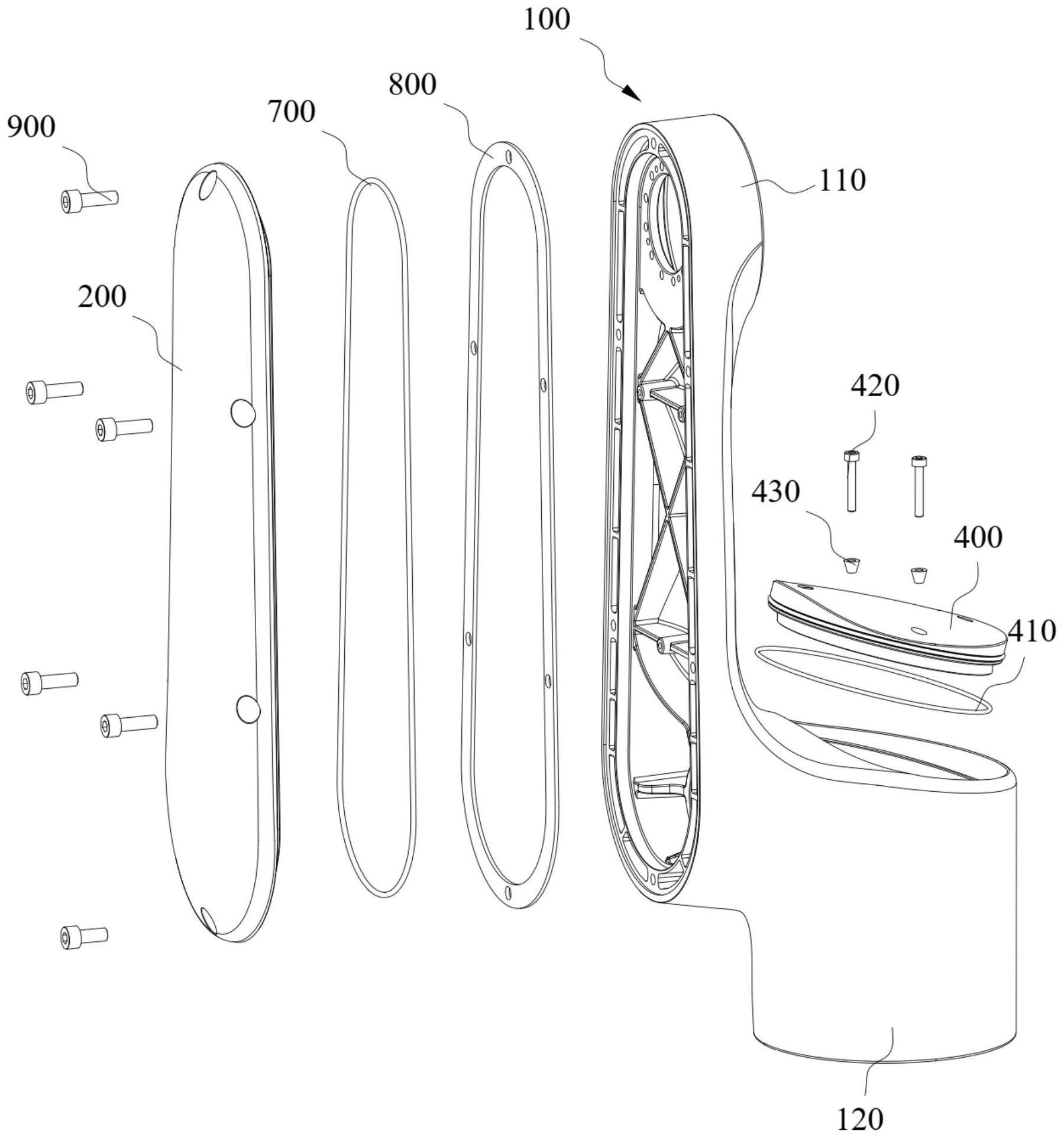
3.根据权利要求2所述的机械臂结构,其特征在于,还包括第二盖体(400),所述第二盖体(400)连接于所述第二固定部(120),所述第二盖体(400)用于封堵所述第二安装孔(121)的一端的开口。
4.根据权利要求3所述的机械臂结构,其特征在于,还包括锁紧件(420),所述第二盖体(400)上嵌设有密封垫(430),所述锁紧件(420)穿过所述密封垫(430)螺纹连接于所述第二固定部(120),以锁紧所述第二盖体(400)和所述第二固定部(120)。
5.根据权利要求2所述的机械臂结构,其特征在于,所述第二固定部(120)呈l形,所述第二固定部(120)自所述第一固定部(110)背离所述第一盖体(200)的一侧沿所述排布方向向背离第一盖体(300)的方向延伸后,沿垂直于所述排布方向向背离所述第一安装孔(111)的方向延伸。
6.根据权利要求1所述的机械臂结构,其特征在于,所述第一腔体(112)内设置有与所述第一加强筋组件(300)和所述第一腔体(112)的腔壁连接的限位环(113),且所述限位环(113)位于所述第一安装孔(111)和所述第二安装孔(121)之间,所述限位环(113)用于供线束穿过。
7.根据权利要求1所述的机械臂结构,其特征在于,还包括安装部(500)和固定件,所述安装部(500)从所述第二加强筋(320)上朝外凸出,所述固定件包括连接部以及u形的夹紧部,所述夹紧部用于固定依次穿过所述第一腔体(112)的线束,所述连接部穿过所述夹紧部并插接于所述安装部(500)。
8.根据权利要求1所述的机械臂结构,其特征在于,所述第一盖体(200)朝向所述主体(100)的一侧设置有沿所述第一盖体(200)的周向延伸的凸起部(210),所述第一盖体(200)和所述凸起部(210)之间围设形成第二腔体(220);
9.根据权利要求1所述的机械臂结构,其特征在于,还包括连接件(900),所述连接件(900)依次穿过所述第一盖体(200)和所述主体(100),并螺纹连接于所述主体(100),以连接所述第一盖体(200)和所述主体(100),所述连接件(900)设置有多个,多个所述连接件沿所述第一盖体(200)的周向分布。
10.一种机器人,其特征在于,包括第一关节模组、第二关节模组和权利要求1-9任一项所述的机械臂结构,所述第一关节模组连接于所述第一安装孔(111)的孔壁,所述第二关节模组连接于所述第二安装孔(121)的孔壁。
技术总结
本发明涉及一种机械臂结构及机器人,机械臂结构包括主体、第一盖体以及多组第一加强筋组件,主体上贯穿设置有第一安装孔和第二安装孔,且第一安装孔的轴线方向和第二安装孔的轴线方向呈夹角,第一安装孔用于安装第一关节模组,第二安装孔用于安装第二关节模组;第一盖体能够盖合于主体,主体朝向第一盖体的一侧设置有第一腔体;多组第一加强筋组件设置于第一腔体内且连接于第一腔体的腔壁,第一加强筋组件包括四个第一加强筋和一个第二加强筋,四个第一加强筋在主体和第一盖体排布方向上的投影围成四边形,第二加强筋在主体和第一盖体排布方向上的投影,连接于四边形相对设置的两个顶点之间,任意两组第一加强筋组件和腔壁围成三角形。
技术研发人员:张健,姜瑞,王光能,张国平
受保护的技术使用者:深圳市大族机器人有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!