一种连杆耦合式机械手指的制作方法
本发明属于机械手,特别是涉及一种连杆耦合式机械手指。
背景技术:
1、为了辅助或替代人手在人类工作环境中进行操作,机械手要实现灵活、精确的运动。根据机械手运动自由度和驱动数量的关系,通常分为欠驱动机械手和全驱动机械手。现有的欠驱动机械手主要分为耦合手、平夹手、自适应手、耦合自适应手和平夹自适应手,欠驱动机械手能够通过减少驱动数量降低机械手的重量以及结构复杂度。
2、机械手的传动方式主要包括线传动和连杆传动,线传动方式具备重量轻、占据空间小的优点,但线传动的机械手指负载能力不足,且传动效率和精度较低;连杆传动方式具备抓取力强、运动精度高的优点,但刚性连杆结构承受碰撞/冲击的能力较差。
技术实现思路
1、本发明的目的在于提供一种连杆耦合式机械手指,以解决现有技术中机械手指普遍存在的自由度数量不足,大多只有主动屈伸运动,无法主动侧摆和旋转运动,不能实现多方位空间抓握,并且刚性连杆抗冲击性较差的问题,本发明提供一种含弹性件的连杆耦合式机械手指,具备主动屈伸、侧摆和整体旋转运动,同时能够实现碰撞缓冲保护功能。
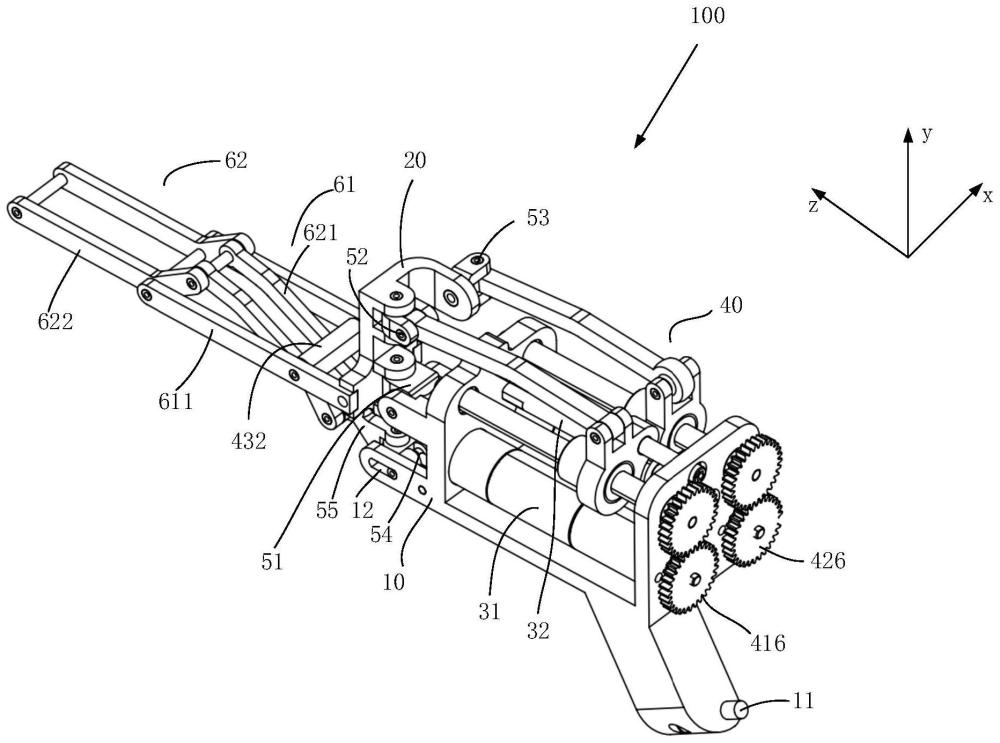
2、为解决上述技术问题,本发明可采用如下技术方案:一种连杆耦合式机械手指,包括基座和连接于基座的指节部,所述基座包括沿z轴延伸的第一基座,以及通过第一转动部可旋转地连接于第一基座的第二基座,所述指节部包括近指节和中指节,近指节包括近指节连杆和中指节传动杆,所述近指节连杆固定连接于第二基座以跟随转动,所述机械手指包括连接于近指节连杆的定轴传动杆,所述中指节传动杆一端连接于中指节连杆,另一端通过第五转动部和定轴传动杆连接,所述第五转动部通过第四转动部连接于第一基座,当所述第二基座带动近指节绕x轴旋转时,所述定轴传动杆和中指节连杆绕中指节传动杆的两端以相反的运动方向旋转。
3、进一步的,所述机械手指包括设置于第一基座的驱动部,所述驱动部包括第一致动器和第二致动器,所述第一致动器通过用于移动设置于第二基座的第二转动部,所述第二致动器用于移动设置于第二基座的第三转动部,所述第一致动器和第二致动器同步驱动时,第二转动部和第三转动部沿yz平面移动,所述第二基座带动近指节绕x轴旋转;所述第二致动器单独驱动时,所述第三转动部沿xz平面移动,所述第二基座带动近指节绕y轴旋转。
4、进一步的,所述第一转动部设置于第二转动部和第三转动部的下方,所述第四转动部设置于第一转动部的下方,所述第三转动部设置于第二转动部的侧面,所述第一转动部、第二转动部和第四转动部的y轴共线、x轴平行;所述第二转动部和第三转动部的x轴共线。
5、进一步的,所述第一致动器和第二致动器同步驱动时,所述第二基座绕第一转动部和第四转动部的x轴转动;所述第二致动器单独驱动时,所述第二基座绕第一转动部、第二转动部和第四转动部的y轴转动。
6、进一步的,所述机械手指包括将驱动部的动力传递至第二基座的传动部,所述驱动部设置于所述第一基座的内部,所述传动部设置于所述驱动部的上方。
7、进一步的,所述传动部包括第一直线运动件、第一传动杆、第二直线运动件、第二传动杆、第一齿轮组和第二齿轮组,所述第一齿轮组将第一致动器的运动传递至第一直线运动件,第一直线运动件将第一致动器的旋转运动转换为沿预设方向的直线运动,所述第一传动杆连接于第一直线运动件以根据第一致动器的动力移动第二转动部;所述第二齿轮组将第二致动器的运动传递至第二直线运动件,第二直线运动件将第二致动器的旋转运动转化为沿预设方向的直线运动,所述第二传动杆连接于第二直线运动件以根据第二致动器的动力移动第三转动部;所述第一齿轮组和第二齿轮组设置于第一基座的端部。
8、进一步的,所述第五转动部具有三个转动自由度,所述第五转动部形成为球铰传动杆。
9、进一步的,所述中指节连杆包括呈预设角度的第一杆段和第二杆段,所述第二杆段的长度小于第一杆段,所述第二杆段和所述定轴传动杆的长度相同。
10、进一步的,所述第四转动部和第一基座之间包括缓冲件,当所述机械手指发生碰撞/冲击时,所述第四转动部相对于第一基座产生位移以提供柔性缓冲。
11、进一步的,所述缓冲件包括设置于第四转动部和第一基座之间的弹性件,所述第四转动部通过第四转动部转轴连接于第一基座,所述第一基座包括用于安装第四转动部转轴的滑槽,当所述机械手指未发生碰撞/冲击时,所述弹性件将第四转动部保持于初始位置;当所述机械手指发生碰撞/冲击时,所述第四转动部转轴可沿所述滑槽移动,所述弹性件提供缓冲力。
12、进一步的,所述机械手指形成为拇指,所述机械手指包括设置于第一基座的第一基座转动部,所述机械手指可通过所述第一基座转动部可旋转地连接于机械手的手掌。
13、与现有技术相比,本发明具体实施例的有益效果在于:1、提供了一种两个指节的耦合连杆机构设计,近指节跟随第二基座绕x轴旋转时,中指节耦合运动以抓取物体;2、机械手指能够主动屈伸、侧摆和整体旋转运动,提高了机械手指的灵巧性,实现高度拟人化;3、近指节屈伸运动和侧摆运动解耦,简化机械手指的运动控制;4、弹性件作为传动缓冲件使得刚性连杆机构具有柔性缓冲保护功能。
技术特征:
1.一种连杆耦合式机械手指,其特征在于,包括基座和连接于基座的指节部,所述基座包括沿z轴延伸的第一基座,以及通过第一转动部可旋转地连接于第一基座的第二基座,所述指节部包括近指节和中指节,近指节包括近指节连杆和中指节传动杆,所述近指节连杆固定连接于第二基座以跟随转动,所述机械手指包括连接于近指节连杆的定轴传动杆,所述中指节传动杆一端连接于中指节连杆,另一端通过第五转动部和定轴传动杆连接,所述第五转动部通过第四转动部连接于第一基座,当所述第二基座带动近指节绕x轴旋转时,所述定轴传动杆和中指节连杆绕中指节传动杆的两端以相反的运动方向旋转。
2.根据权利要求1所述的连杆耦合式机械手指,其特征在于,所述机械手指包括设置于第一基座的驱动部,所述驱动部包括第一致动器和第二致动器,所述第一致动器通过用于移动设置于第二基座的第二转动部,所述第二致动器用于移动设置于第二基座的第三转动部,所述第一致动器和第二致动器同步驱动时,第二转动部和第三转动部沿yz平面移动,所述第二基座带动近指节绕x轴旋转;所述第二致动器单独驱动时,所述第三转动部沿xz平面移动,所述第二基座带动近指节绕y轴旋转。
3.根据权利要求2所述的连杆耦合式机械手指,其特征在于,所述第一转动部设置于第二转动部和第三转动部的下方,所述第四转动部设置于第一转动部的下方,所述第三转动部设置于第二转动部的侧面,所述第一转动部、第二转动部和第四转动部的y轴共线、x轴平行;所述第二转动部和第三转动部的x轴共线。
4.根据权利要求3所述的连杆耦合式机械手指,其特征在于,所述第一致动器和第二致动器同步驱动时,所述第二基座绕第一转动部和第四转动部的x轴转动;所述第二致动器单独驱动时,所述第二基座绕第一转动部、第二转动部和第四转动部的y轴转动。
5.根据权利要求2所述的连杆耦合式机械手指,其特征在于,所述机械手指包括将驱动部的动力传递至第二基座的传动部,所述驱动部设置于所述第一基座的内部,所述传动部设置于所述驱动部的上方。
6.根据权利要求5所述的连杆耦合式机械手指,其特征在于,所述传动部包括第一直线运动件、第一传动杆、第二直线运动件、第二传动杆、第一齿轮组和第二齿轮组,所述第一齿轮组将第一致动器的运动传递至第一直线运动件,第一直线运动件将第一致动器的旋转运动转换为沿预设方向的直线运动,所述第一传动杆连接于第一直线运动件以根据第一致动器的动力移动第二转动部;所述第二齿轮组将第二致动器的运动传递至第二直线运动件,第二直线运动件将第二致动器的旋转运动转化为沿预设方向的直线运动,所述第二传动杆连接于第二直线运动件以根据第二致动器的动力移动第三转动部;所述第一齿轮组和第二齿轮组设置于第一基座的端部。
7.根据权利要求1所述的连杆耦合式机械手指,其特征在于,所述第五转动部具有三个转动自由度,所述第五转动部形成为球铰传动杆。
8.根据权利要求1所述的连杆耦合式机械手指,其特征在于,所述中指节连杆包括呈预设角度的第一杆段和第二杆段,所述第二杆段的长度小于第一杆段,所述第二杆段和所述定轴传动杆的长度相同。
9.根据权利要求1所述的连杆耦合式机械手指,其特征在于,所述第四转动部和第一基座之间包括缓冲件,当所述机械手指发生碰撞/冲击时,所述第四转动部相对于第一基座产生位移以提供柔性缓冲。
10.根据权利要求9所述的连杆耦合式机械手指,其特征在于,所述缓冲件包括设置于第四转动部和第一基座之间的弹性件,所述第四转动部通过第四转动部转轴连接于第一基座,所述第一基座包括用于安装第四转动部转轴的滑槽,当所述机械手指未发生碰撞/冲击时,所述弹性件将第四转动部保持于初始位置;当所述机械手指发生碰撞/冲击时,所述第四转动部转轴可沿所述滑槽移动,所述弹性件提供缓冲力。
11.根据权利要求1所述的连杆耦合式机械手指,其特征在于,所述机械手指形成为拇指,所述机械手指包括设置于第一基座的第一基座转动部,所述机械手指可通过所述第一基座转动部可旋转地连接于机械手的手掌。
技术总结
本发明提供一种连杆耦合式机械手指,包括基座和连接于基座的指节部,所述基座包括沿Z轴延伸的第一基座、连接于第一基座的第二基座,所述指节部包括近指节和中指节,近指节连杆固定连接于第二基座以跟随转动,所述机械手指包括连接于近指节连杆的定轴传动杆,中指节传动杆一端连接于中指节连杆,另一端通过第五转动部和定轴传动杆连接,所述第五转动部通过第四转动部连接于第一基座,当所述第二基座带动近指节绕X轴旋转时,所述定轴传动杆和中指节连杆绕中指节传动杆的两端以相反的运动方向旋转。本发明具体实施例的机械手指,近指节跟随第一基座绕X轴旋转时,中指节耦合运动以实现抓握,连杆耦合式的驱动减少了致动器的数量,并且具有柔性碰撞缓冲功能。
技术研发人员:刘静帅,孙恺,曹宇男
受保护的技术使用者:苏州艾利特机器人有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!