柔性关节的控制方法、柔性关节、机械臂、设备及介质与流程
本申请属于机器人控制,尤其涉及一种柔性关节的控制方法、柔性关节、机械臂、设备及介质。
背景技术:
1、近年来,柔性机械臂的发展越来越迅速。其中,柔性机械臂是一种类似象鼻的多段式机械臂。它的每一个单段关节都由多个流体驱动器并联而成,一般单关节上的流体驱动器数量大于等于3个。流体驱动器是一种通过压力控制内部的气体或液体等流体,以实现线性运动的柔性驱动器。
2、现有的柔性关节的控制,通常采用的方式为:
3、通过控制阀门调节每个流体驱动器内部的压力,控制每个流体驱动器的长度不同,从而在有限范围内实现单个关节末端的旋转,弯曲,甚至伸缩。例如,当单关节上的流体驱动器数量为3时,当任意两个流体驱动器充压变长,第三个流体驱动器压缩变短时,长度差造成关节向压缩变短的驱动器方向弯曲,如果在长度方向上没有机械约束,三个流体驱动器都充压或者压缩,可以实现整个关节的长度伸缩变化。
4、但这种控制方式,会随着阀门的开通关闭或者阀门的调大调小,及开关阀自身存在的响应延期,导致机械臂的关节在进行整体运动过程中出现抖动、蠕动的特性,缺乏平滑性。
技术实现思路
1、本申请实施例提供了一种柔性关节的控制方法、柔性关节、机械臂、设备及介质,以解决现有技术中机械臂的关节在进行整体运动过程中出现抖动、蠕动的特性,缺乏平滑性的问题。
2、本申请实施例的第一方面提供了一种柔性关节的控制方法,所述柔性关节包括多个流体驱动器,所述方法包括:
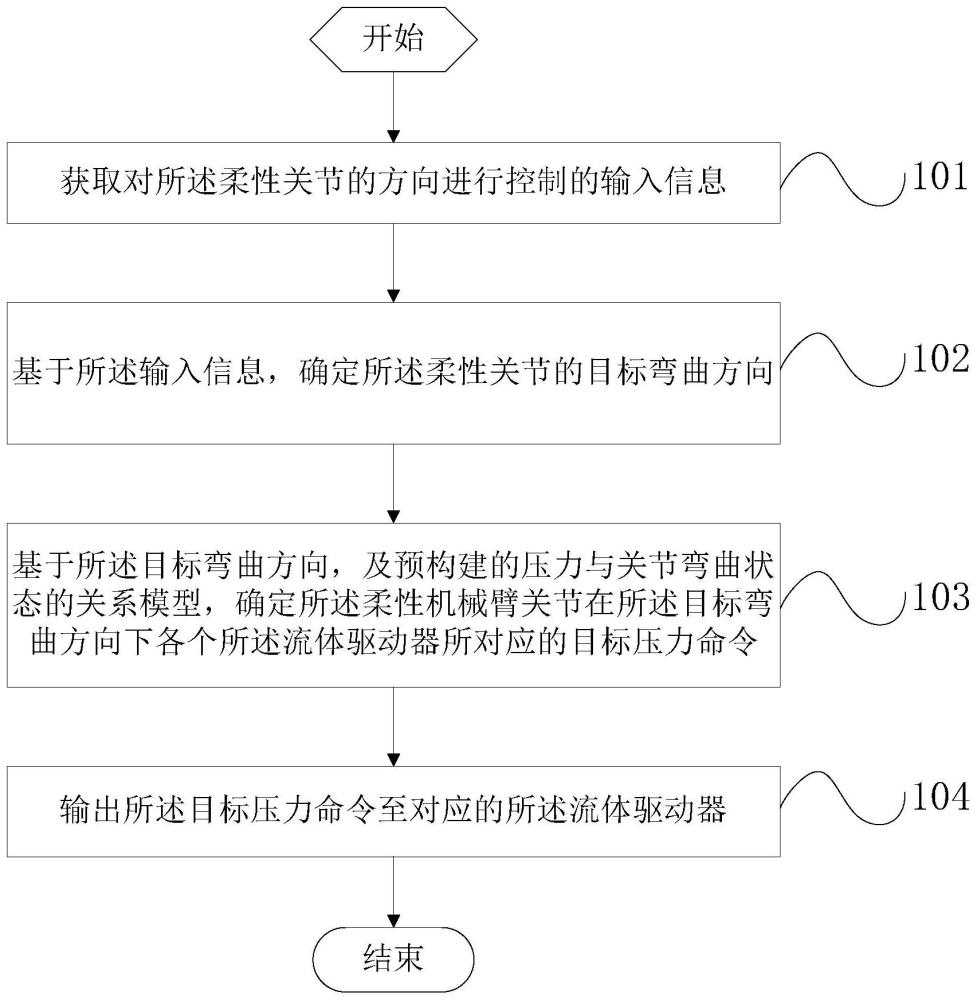
3、获取对所述柔性关节的方向进行控制的输入信息;
4、基于所述输入信息,确定所述柔性关节的目标弯曲方向;
5、基于所述目标弯曲方向,及预构建的压力与关节弯曲状态的关系模型,确定所述柔性关节在所述目标弯曲方向下各个所述流体驱动器所对应的目标压力命令;其中,所述压力与关节弯曲状态的关系模型中包含所述柔性关节的不同设定弯曲方向,及各个所述流体驱动器在每一所述设定弯曲方向下弯曲程度最大状态下的压力值,不同的所述压力值对应于不同的压力命令;
6、输出所述目标压力命令至对应的所述流体驱动器。
7、本申请实施例的第二方面提供了一种柔性关节的关节控制装置,所述柔性关节包括多个流体驱动器,所述装置包括:
8、获取模块,用于获取对所述柔性关节的方向进行控制的输入信息;
9、方向确定模块,用于基于所述输入信息,确定所述柔性关节的目标弯曲方向;
10、命令确定模块,用于基于所述目标弯曲方向,及预构建的压力与关节弯曲状态的关系模型,确定所述柔性关节在所述目标弯曲方向下各个所述流体驱动器所对应的目标压力命令;其中,所述压力与关节弯曲状态的关系模型中包含所述柔性关节的不同设定弯曲方向,及各个所述流体驱动器在每一所述设定弯曲方向下弯曲程度最大状态下的压力值,不同的所述压力值对应于不同的压力命令;
11、控制模块,用于输出所述目标压力命令至对应的所述流体驱动器。
12、本申请实施例的第三方面提供了一种柔性关节,其特征在于,所述柔性关节包括多个流体驱动器,所述柔性关节通过如上第一方面所述的方法实现控制。
13、本申请实施例的第四方面提供了一种柔性机械臂,所述柔性机械臂包括至少一个柔性关节,所述柔性机械臂通过如上第一方面所述的方法实现对所述柔性关节的控制。
14、本申请实施例的第五方面提供了一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述方法的步骤。
15、本申请实施例的第六方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面所述方法的步骤。
16、本申请的第七方面提供了一种计算机程序产品,当所述计算机程序产品在计算机设备上运行时,使得所述计算机设备执行上述第一方面所述方法的步骤。
17、由上可见,本申请实施例中,基于获取到的对柔性关节的方向进行控制的输入信息,确定该输入信息指示的目标弯曲方向,通过事先构建的关系模型,确定出在目标弯曲方向下各个流体驱动器所对应的目标压力命令,以控制各流体驱动器的压力命令直接跳变为该目标弯曲方向上的最大计算压力,可以精确控制弯曲方向,使得关节运动过程中,各个驱动器相关阀适应性处于常开或常闭状态即可,确保机械臂关节的运动过程平滑无抖动。
技术特征:
1.一种柔性关节的控制方法,所述柔性关节包括多个流体驱动器,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述目标弯曲方向,及预构建的压力与关节弯曲状态的关系模型,确定所述柔性关节在所述目标弯曲方向下各个所述流体驱动器所对应的目标压力命令,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于各个所述流体驱动器分别对应的所述第一压力值及所述第二压力值,确定所述柔性关节在所述目标弯曲方向下各个所述流体驱动器所对应的目标压力值,包括:
4.根据权利要求1所述的方法,其特征在于,所述基于所述目标弯曲方向,及预构建的压力与关节弯曲状态的关系模型,确定所述柔性关节在所述目标弯曲方向下各个所述流体驱动器所对应的目标压力命令,包括:
5.根据权利要求1所述的方法,其特征在于,所述基于所述目标弯曲方向,及预构建的压力与关节弯曲状态的关系模型,确定所述柔性关节在所述目标弯曲方向下各个所述流体驱动器所对应的目标压力命令之前,还包括:
6.根据权利要求1所述的方法,其特征在于,所述输入信息包括:通过摇杆手柄输入的x轴方向上的第一摇杆位移量及y轴方向上的第二摇杆位移量。
7.根据权利要求6所述的方法,其特征在于,所述基于所述输入信息,确定所述柔性关节的目标弯曲方向,包括:
8.一种柔性关节,其特征在于,所述柔性关节包括多个流体驱动器,所述柔性关节通过如权利要求1-7任一项所述的方法实现控制。
9.一种柔性机械臂,其特征在于,所述柔性机械臂包括至少一个柔性关节,所述柔性机械臂通过如权利要求1-7任一项所述的方法实现对所述柔性关节的控制。
10.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述方法的步骤。
11.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述方法的步骤。
技术总结
本申请适用于机器人控制技术领域,提供一种柔性关节的控制方法、柔性关节、机械臂、设备及介质,其中方法包括:获取对所述柔性关节的方向进行控制的输入信息;基于所述输入信息,确定所述柔性关节的目标弯曲方向;基于所述目标弯曲方向,及预构建的压力与关节弯曲状态的关系模型,确定所述柔性关节在所述目标弯曲方向下各个所述流体驱动器所对应的目标压力命令;输出所述目标压力命令至对应的所述流体驱动器。该方案能够确保机械臂关节的运动过程平滑无抖动。
技术研发人员:陈晓蛟,王琳,徐辉
受保护的技术使用者:万勋科技(深圳)有限公司
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!