一种仿生螃蟹机器人
本发明属于机器人,具体涉及一种仿生螃蟹机器人。
背景技术:
1、仿生机器人为21世纪初机械科学发展的一个重要方向。目前,在机器人研究领域,应用仿生学原理,模仿生物的结构特性、从事适合生物特点工作的仿生机器人的研究极具发展潜力,而多足仿生机器人则成为其研究的一个热点。通过结构仿生研究生物肌体的组成结构,构造类似生物体整体或部分单元的机械结构,力求通过相似结构实现相近的功能。
2、现有的仿生螃蟹机器人,如图1所示,这款仿生螃蟹机器人包括机身本体以及对称设置的能开合的气动螯钳,两侧对称设有能驱动其横向移动的四腿移动机构,通过左右移动进行夹取操作。
3、但是目前的现有技术在设计上有一定的缺点:第一,作为一款灵活移动机器人,却无法做到灵活的转动,在仿生螃蟹的基础上没有改善其无法灵活转动的缺点,在面临弯道狭窄地段时会导致整体处于进退两难的处境;第二,在作用上功能比较单一,并且使用的环境有较大的局限性,适应力不强,在环境条件恶劣的情况下机器不能正常运作或者运作不顺利;由于其腿部尖端的设置,从而使得整个装置的运行稳定性不强,在机器的运转过程中颠簸强烈,不能保证起平稳的移动;第三,蟹钳只能做到单一固定物品的夹取,无法实现向后的放置操作;第四,控制功能不完善,只有蟹钳控制,但无实时反馈功能,夹取物品的同时无法掌握抓取力度,容易造成物品损坏等问题。
技术实现思路
1、为了解决上述问题,本发明提供了一种仿生螃蟹机器人,该机器人从仿生角度出发,利用曲柄摇杆、齿轮齿条、丝杠机构等机械结构,通过控制编码电机和转向舵机可以实现仿生螃蟹的横向行走、转向,可以代替人工进行取物,同时钳子可以进行模块替换以实现不同的功能,如穿插、挖掘等。
2、为实现上述发明目的,本发明所采用的技术方案是:一种仿生螃蟹机器人,包括机器人本体,所述机器人本体上设置行走机构和夹取机构,所述行走机构设置在机器人本体的两侧呈“螃蟹”状,所述机器人本体上设置有转向机构,所述转向机构带动机器人本体在360°的范围内移动转向;两侧所述的行走机构通过驱动机构带动同时同向运动,所述夹取机构的夹取方向与行走机构的朝向相同。
3、优选的,所述转向机构包括舵机和导向轮,所述舵机带动导向轮转动,所述转向机构设置在其中一个夹取机构上。
4、优选的,所述导向轮与第一连杆连接,所述第一连杆的另一端铰接第二连杆,所述第二连杆的另一端与机器人本体连接,所述第一连杆和第二连杆之间连接伸缩杆;所述夹取机构包括第一夹钳,所述第一连杆和第二连杆的连接处,或第一连杆上设置第一夹钳。
5、优选的,所述第二连杆与短接杆铰接,所述短接杆的另一端与机器人本体连接,所述第二连杆通过牵拉机构与机器人本体连接,所述牵拉机构带动第二连杆抬起/放下。
6、优选的,所述夹取机构还包括第二夹钳,所述第二夹钳设置在与第一夹钳相对的位置,所述第二夹钳上依次连接小臂和大臂,所述大臂与机器人本体铰接,所述小臂通过齿轮传动抬起/放下,所述大臂通过牵拉机构与机器人本体连接,所述牵拉机构带动大臂抬起/放下。
7、优选的,所述牵拉机构包括第一电机,所述第一电机与转动柱连接,所述转动柱上固定连接牵引绳的一端,所述第一电机转动后带动牵引绳缠绕在转动柱上;所述小臂远离第二夹钳的一端上连接第一齿轮,所述第一齿轮与第二齿轮啮合,所述第二齿轮通过第二电机驱动。
8、优选的,所述第一夹钳和第二夹钳上分别设置第二滑块,所述第二滑块与第二丝杆连接;所述第二滑块在第二丝杆的转动下移动,所述第二滑块带动第一夹钳、第二夹钳开合;所述第一夹钳、第二夹钳上分别设置压力传感器。
9、优选的,所述机器人本体上设置有装载篮,所述装载篮一端与机器人本体铰接,所述装载篮的另一端与第一滑块滑动连接,所述第一滑块与第一丝杆连接,所述第一丝杆转动后带动第一滑块朝向装载篮的铰接方向靠近/远离。
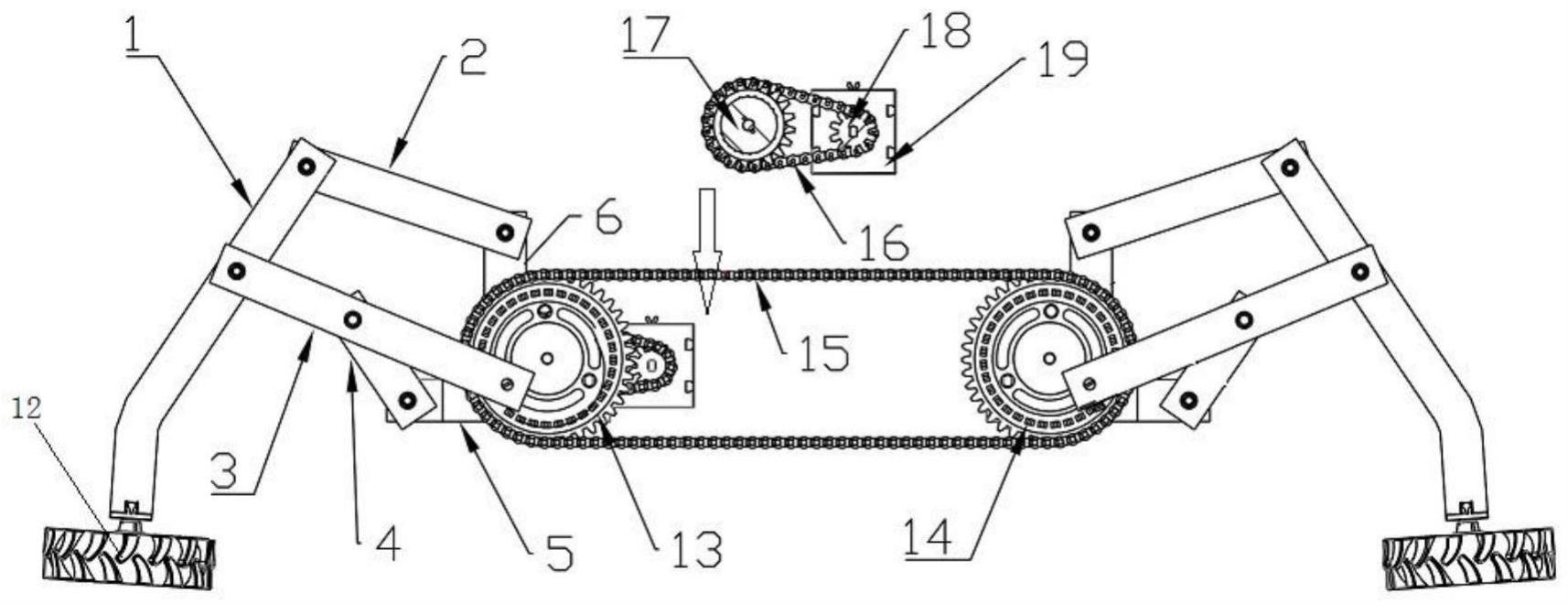
10、优选的,所述行走机构包括第一杆件、第二杆件和第三杆件,所述第一杆件、第二杆件和第三杆件铰接成为“f”形,所述第一杆件的着地端上铰接踏轮,所述第二杆件与机器人本体铰接,所述第三杆件铰接在驱动机构上。
11、优选的,所述驱动机构包括第三齿轮、第四齿轮和驱动齿轮,所述第三齿轮对称设置在机器人本体的两侧分别与机器人本体两侧的行走机构连接,两个对称设置的第三齿轮之间通过第一链条连接;所述驱动齿轮通过第二链条与第四齿轮连接,所述第四齿轮与第三齿轮固定连接。
12、本发明具有以下有益效果:
13、(1)本发明的仿生螃蟹机器人通过转向机构的设置,使得机器人可以在360°的范围内移动转向,从而拓宽了机器人的移动和工作范围,提高了机器人的灵活性;且本发明的夹取机构的夹取方向与行走机构的朝向相同,从而保证了机器人在进行夹取操作时,无需进行多余的移动即可完成夹取动作,并放置在机器人本体上的装载篮中,完成物品的回收;
14、(2)本发明的转向机构通过连杆与舵机组合设置,可以完成大角度、小角度的转向,灵活了转动的范围,当不需要进行转向时,连杆的设置可以带动其上的夹钳向前伸出,完成较远处,或狭小空间内的取物操作;
15、(3)本发明中的行走机构可以通过一个电机的带动下,进行同时同向的行走动作,简化了多足机器人的复杂控制和操作,使得多足机器人的控制更加简单化,同时多足机器人的曲柄摇杆结构也使得机器人的行动场合更加丰富,能够在平地、草地、沙地等特殊场地进行作业。
技术特征:
1.一种仿生螃蟹机器人,包括机器人本体,所述机器人本体上设置行走机构和夹取机构,所述行走机构设置在机器人本体的两侧呈“螃蟹”状,其特征在于:所述机器人本体上设置有转向机构,所述转向机构带动机器人本体在360°的范围内移动转向;两侧所述的行走机构通过驱动机构带动同时同向运动,所述夹取机构的夹取方向与行走机构的朝向相同。
2.根据权利要求1所述的仿生螃蟹机器人,其特征在于:所述转向机构包括舵机(20)和导向轮(21),所述舵机(20)带动导向轮(21)转动,所述转向机构设置在其中一个夹取机构上。
3.根据权利要求2所述的仿生螃蟹机器人,其特征在于:所述导向轮(21)与第一连杆(7)连接,所述第一连杆(7)的另一端铰接第二连杆(8),所述第二连杆(8)的另一端与机器人本体连接,所述第一连杆(7)和第二连杆(8)之间连接伸缩杆(9);所述夹取机构包括第一夹钳(11),所述第一连杆(7)和第二连杆(8)的连接处,或第一连杆(7)上设置第一夹钳(11)。
4.根据权利要求3所述的仿生螃蟹机器人,其特征在于:所述第二连杆(8)与短接杆(10)铰接,所述短接杆(10)的另一端与机器人本体连接,所述第二连杆(8)通过牵拉机构与机器人本体连接,所述牵拉机构带动第二连杆(8)抬起/放下。
5.根据权利要求4所述的仿生螃蟹机器人,其特征在于:所述夹取机构还包括第二夹钳(25),所述第二夹钳(25)设置在与第一夹钳(11)相对的位置,所述第二夹钳(25)上依次连接小臂(26)和大臂(29),所述大臂(29)与机器人本体铰接,所述小臂(26)通过齿轮传动抬起/放下,所述大臂(29)通过牵拉机构与机器人本体连接,所述牵拉机构带动大臂(29)抬起/放下。
6.根据权利要求5所述的仿生螃蟹机器人,其特征在于:所述牵拉机构包括第一电机(36),所述第一电机(36)与转动柱(35)连接,所述转动柱(35)上固定连接牵引绳(33)的一端,所述第一电机(36)转动后带动牵引绳(33)缠绕在转动柱(35)上;所述小臂(26)远离第二夹钳(25)的一端上连接第一齿轮(27),所述第一齿轮(27)与第二齿轮啮合,所述第二齿轮通过第二电机驱动。
7.根据权利要求6所述的仿生螃蟹机器人,其特征在于:所述第一夹钳(11)和第二夹钳(25)上分别设置第二滑块(23),所述第二滑块(23)与第二丝杆(24)连接;所述第二滑块(23)在第二丝杆(24)的转动下移动,所述第二滑块(23)带动第一夹钳(11)、第二夹钳(25)开合;所述第一夹钳(11)、第二夹钳(25)上分别设置压力传感器。
8.根据权利要求1所述的仿生螃蟹机器人,其特征在于:所述机器人本体上设置有装载篮(37),所述装载篮(37)一端与机器人本体铰接,所述装载篮(37)的另一端与第一滑块(38)滑动连接,所述第一滑块(38)与第一丝杆(39)连接,所述第一丝杆(39)转动后带动第一滑块(38)朝向装载篮(37)的铰接方向靠近/远离。
9.根据权利要求1所述的仿生螃蟹机器人,其特征在于:所述行走机构包括第一杆件(1)、第二杆件(2)和第三杆件(3),所述第一杆件(1)、第二杆件(2)和第三杆件(3)铰接成为“f”形,所述第一杆件(1)的着地端上铰接踏轮(12),所述第二杆件(2)与机器人本体铰接,所述第三杆件(3)铰接在驱动机构上。
10.根据权利要求9所述的仿生螃蟹机器人,其特征在于:所述驱动机构包括第三齿轮(13)、第四齿轮(17)和驱动齿轮(18),所述第三齿轮(13)对称设置在机器人本体的两侧分别与机器人本体两侧的行走机构连接,两个对称设置的第三齿轮(13)之间通过第一链条(15)连接;所述驱动齿轮通过第二链条(16)与第四齿轮(17)连接,所述第四齿轮(17)与第三齿轮(13)固定连接。
技术总结
本发明具体涉及一种仿生螃蟹机器人,包括机器人本体,所述机器人本体上设置行走机构和夹取机构,所述行走机构设置在机器人本体的两侧呈“螃蟹”状,所述机器人本体上设置有转向机构,所述转向机构带动机器人本体在360°的范围内移动转向;两侧所述的行走机构通过驱动机构带动同时同向运动,所述夹取机构的夹取方向与行走机构的朝向相同。目的在于利用曲柄摇杆、齿轮齿条、丝杠机构等机械结构,通过控制编码电机和转向舵机可以实现仿生螃蟹的横向行走、转向,可以代替人工进行取物,同时钳子可以进行模块替换以实现不同的功能,如穿插、挖掘等。
技术研发人员:周桂宇,李灿,黄海斌,李敬天,梁广南,段毅龙
受保护的技术使用者:宜宾学院
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!