一种通过舌头操控的三维空间人机交互装置
1.本发明涉及助老助残或者机器人领域,具体涉及一种通过舌头操作的三维空间人机交 互装置。
背景技术:
2.随着机器人技术的进步,人机共融成为了新的研究热点与主题,人们也对机器人的功 能提出更多的挑战与期待。为了满足肢体不便的老年人以及身体缺陷或瘫痪的残疾人的生 活需求,将机器人技术应用于助老助残的场景中,已有的人机交互方法包括:肌电信号识 别、脑电信号识别、语音识别、眼动识别等。然而,这些技术依然存在着延迟大、设备穿 戴复杂、适应性差、错误识别等问题。
技术实现要素:
3.本发明为克服现有技术的不足,提供一种通过舌头操控的三维空间人机交互装置。该 装置穿戴方便,可满足日常的操控延时需求,通过舌头控制,适应性强,操控精准,占用 空间小,使用便携。
4.一种通过舌头操控的三维空间人机交互装置包含:
5.可佩戴组件,用于佩戴于人体部位;
6.主操控器,可拆卸地安装在可佩戴组件上;
7.所述主操控器包含外壳、操控杆、定位胶塞、磁铁和集成电路控制模块;所述外壳的 一侧开口、另一侧封闭,定位胶塞插装在外壳内,定位胶塞、外壳和封闭端围成一腔体, 定位胶塞与外壳内壁具有与所述腔体相通的气道,定位胶塞的中部插装有一根可偏摆的操 控杆,操控杆的一端置于所述腔体内、另一端置于所述开口外,所述操控杆的一端安装有 磁铁、另一端具有可使舌头操控的操纵部,外壳的封闭端内侧布置有集成电路控制模块, 以获取腔体内的磁场变化以及气压变化,用于分析人体意图。
8.进一步地,所述集成电路控制模块包含单片机、霍尔传感器和气压传感器;霍尔传感 器的信号输出端与单片机的引脚相连,气压传感器的信号输出端与单片机的信号输入端相 连,蓝牙芯片与单片机电连接,实现数据传输。
9.进一步地,所述可佩戴组件包含佩戴圈、调节杆、纵向连接杆和横向连接杆;调节杆 的一端可滑动地设置在佩戴圈上,通过螺钉一将纵向连接杆的一端安装在调节杆的另一端, 以实现纵向连接杆的纵向位置调节,通过螺钉二将横向连接杆的一端安装在纵向连接杆的 另一端,以实现横向连接杆的横向位置调节,通过螺钉三将主操控器安装在横向连接杆的 另一端,以实现主操控器的姿态调整。
10.本发明相比现有技术的有益效果是:
11.1、本发明通过舌头拨动操纵杆,改变末端磁铁位置,通过吹气和吸气的方式改变操控 器腔体内的气压值,通过集成电路控制获取装置的磁场变化以及气压变化,从而分析人体 意图。本发明操控器中的定位胶塞主要起到储能、复位的作用,能够使穿戴者在非使
盈配合。如此设置,确保连接的可靠。所述操纵部7-1的外形为轮齿状。如此设置,为了 防止舌头在操控杆时发生滑动,提高操控效果。
28.如图3-图4所示,所述外壳6为筒状体。端盖9与外壳6之间通过螺钉连接,形成封 闭端,有利于固定集成电路控制模块12和形成稳定的腔体。磁铁安装盖10通过螺钉与操 控杆7进行固定,磁铁11与磁铁安装盖10之间过盈配合。如此设置,确保磁铁11被稳定 可靠定位。
29.进一步地,所述外壳6和操控杆7的材质均为合成树脂。定位胶塞8的材质为橡胶, 如此设置,外壳6、操控杆7和定位胶塞8总质量约为30g,可佩戴组件a的重量约为180g。
30.作为一种可能的实施方式,如图4所示,所述定位胶塞8为环体8-1和空心锥体8-2 的复合体;空心锥体8-2的大直径端与环体8-1的内边缘固接,环体8-1的外表面固定在 外壳6的内壁面上,操控杆7密封插装在空心锥体8-2的顶部。如此设置,便于推入定位 胶塞8时更方便安装固定。
31.作为一种可能的实施方式,如图5所示,所述集成电路控制模块12包含单片机12-1、 霍尔传感器12-2和气压传感器12-3;霍尔传感器12-2的信号输出端与单片机12-1的引脚 相连,气压传感器12-2的信号输出端与单片机12-1的信号输入端相连,蓝牙芯片12-4与 单片机12-1电连接,实现数据传输。
32.穿戴者首先将可佩戴附件a置于人体部位,随后将主操控器b放入口中,通过舌头拨 动操纵杆7,改变末端磁铁11位置,通过吹气和吸气的方式改变操控器腔体内的气压值。 随后,通过集成电路控制模块12上集成的霍尔传感器12-1和气压传感器12-2获取装置的 磁场变化以及气压变化,从而分析人体意图。还包含电源模块,电源模块给集成电路控制 模块12供电。
33.可选地,气压传感器选用hp203b型传感器,蓝牙芯选用型号ecb02的芯片,霍尔传感 器型号选用a1302elhlt,单片机选用stm32f03。
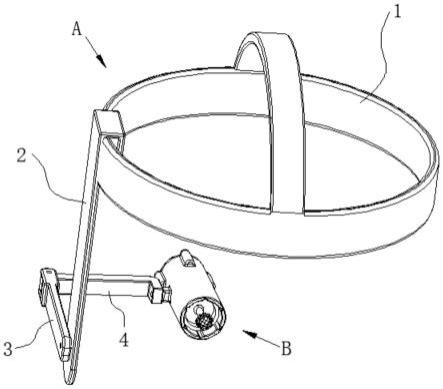
34.进一步地,如图1所示,所述可佩戴组件a包含佩戴圈1、调节杆2、纵向连接杆3和 横向连接杆4;
35.调节杆2的一端可滑动地设置在佩戴圈1上,通过螺钉一将纵向连接杆3的一端安装 在调节杆2的另一端,以实现纵向连接杆3的纵向位置调节,调节螺钉一的松紧改变纵向 连接杆3的偏摆角度,最终实现主操控器b在纵向上的位置调整;通过螺钉二将横向连接 杆4的一端安装在纵向连接杆3的另一端,以实现横向连接杆4的横向位置调节,调节螺 钉二的松紧改变横向连接杆4的偏摆角度,最终实现主操控器b在横向上的位置调整;通 过螺钉三将主操控器b安装在横向连接杆4的另一端,以实现主操控器b的姿态调整。调 节螺钉三的松紧改变柱操控器b的偏摆角度,综合利用纵向连接杆3和横向连接杆4的调 整,实现主操控器b的三维空间姿态调整。
36.可选地,所述佩戴圈1可替换为头戴式增强设备。以实现更多更丰富的功能拓展,感 知反馈;本实施方式可结合机械臂,实现人机交互,并对机械臂的移动进行操控。
37.本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术 人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许 的更动或修饰为等同变化的等效实施案例,均仍属本发明技术方案范围。
技术特征:
1.一种通过舌头操控的三维空间人机交互装置,其特征在于:包含可佩戴组件(a),用于佩戴于人体部位;主操控器(b),可拆卸地安装在可佩戴组件(a)上;所述主操控器包含外壳(6)、操控杆(7)、定位胶塞(8)、磁铁(11)和集成电路控制模块(12);所述外壳(6)的一侧开口、另一侧封闭,定位胶塞(8)插装在外壳(6)内,定位胶塞(8)、外壳(6)和封闭端围成一腔体,定位胶塞(8)与外壳(6)内壁具有与所述腔体相通的气道,定位胶塞(8)的中部插装有一根可偏摆的操控杆(7),操控杆(7)的一端置于所述腔体内、另一端置于所述开口外,所述操控杆(7)的一端安装有磁铁(11)、另一端具有可使舌头操控的操纵部,外壳(6)的封闭端内侧布置有集成电路控制模块(12),以获取腔体内的磁场变化以及气压变化,用于分析人体意图。2.根据权利要求1所述一种通过舌头操控的三维空间人机交互装置,其特征在于:所述定位胶塞(8)与外壳(6)内壁过盈配合。3.根据权利要求1所述一种通过舌头操控的三维空间人机交互装置,其特征在于:所述操纵部(7-1)的外形为轮齿状。4.根据权利要求1所述一种通过舌头操控的三维空间人机交互装置,其特征在于:所述外壳(6)为筒状体。5.根据权利要求1所述一种通过舌头操控的三维空间人机交互装置,其特征在于:所述外壳(6)和操控杆(7)的材质均为合成树脂。6.根据权利要求1所述一种通过舌头操控的三维空间人机交互装置,其特征在于:所述定位胶塞(8)的材质为橡胶。7.根据权利要求1所述一种通过舌头操控的三维空间人机交互装置,其特征在于:所述集成电路控制模块(12)包含单片机(12-1)、霍尔传感器(12-2)和气压传感器(12-3);霍尔传感器(12-2)的信号输出端与单片机(12-1)的引脚相连,气压传感器(12-2)的信号输出端与单片机(12-1)的信号输入端相连,蓝牙芯片(12-4)与单片机(12-1)电连接,实现数据传输。8.根据权利要求1或6所述一种通过舌头操控的三维空间人机交互装置,其特征在于:所述定位胶塞(8)为环体(8-1)和空心锥体(8-2)的复合体;空心锥体(8-2)的大直径端与环体(8-1)的内边缘固接,环体(8-1)的外表面固定在外壳(6)的内壁面上,操控杆(7)密封插装在空心锥体(8-2)的顶部。9.根据权利要求1所述一种通过舌头操控的三维空间人机交互装置,其特征在于:所述可佩戴组件(a)包含佩戴圈(1)、调节杆(2)、纵向连接杆(3)和横向连接杆(4);调节杆(2)的一端可滑动地设置在佩戴圈(1)上,通过螺钉一将纵向连接杆(3)的一端安装在调节杆(2)的另一端,以实现纵向连接杆(3)的纵向位置调节,通过螺钉二将横向连接杆(4)的一端安装在纵向连接杆(3)的另一端,以实现横向连接杆(4)的横向位置调节,通过螺钉三将主操控器(b)安装在横向连接杆(4)的另一端,以实现主操控器(b)的姿态调整。10.根据权利要求9所述一种通过舌头操控的三维空间人机交互装置,其特征在于:所述佩戴圈(1)可替换为头戴式增强现实设备。
技术总结
一种通过舌头操控的三维空间人机交互装置,它包含可佩戴组件,用于佩戴于人体部位;主操控器,可拆卸地安装在可佩戴组件上;所述主操控器包含外壳、操控杆、定位胶塞、磁铁和集成电路控制模块;定位胶塞插装在外壳内,定位胶塞与外壳内壁具有与所述腔体相通的气道,定位胶塞的中部插装有一根可偏摆的操控杆,操控杆的一端置于所述腔体内、另一端置于所述开口外,所述操控杆的一端安装有磁铁、另一端具有可使舌头操控的操纵部,外壳的封闭端内侧布置有集成电路控制模块,以获取腔体内的磁场变化以及气压变化,用于分析人体意图。本发明穿戴方便,可满足日常的操控延时需求,通过舌头控制,适应性强,操控精准,占用空间小,使用便携。使用便携。使用便携。
技术研发人员:朱延河 荆泓玮 巨浩天 赵杰
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.11.01
技术公布日:2023/1/31
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1