一种抓取方法、装置和机器人与流程
本公开涉及机器人,尤其涉及一种抓取方法、装置和机器人。
背景技术:
1、目前,工业机械臂在物体抓取上已经比较成熟,工业机械臂一般从本体延伸出来,在抓取物体时,本体不动,机械臂进行物体抓取,因此,仅适用于工作空间固定的情况下物体的抓取。
技术实现思路
1、为克服相关技术中存在的问题,本公开实施例提供一种抓取方法、装置和机器人。所述技术方案如下:
2、根据本公开实施例的第一方面,提供一种抓取方法,所述方法包括:
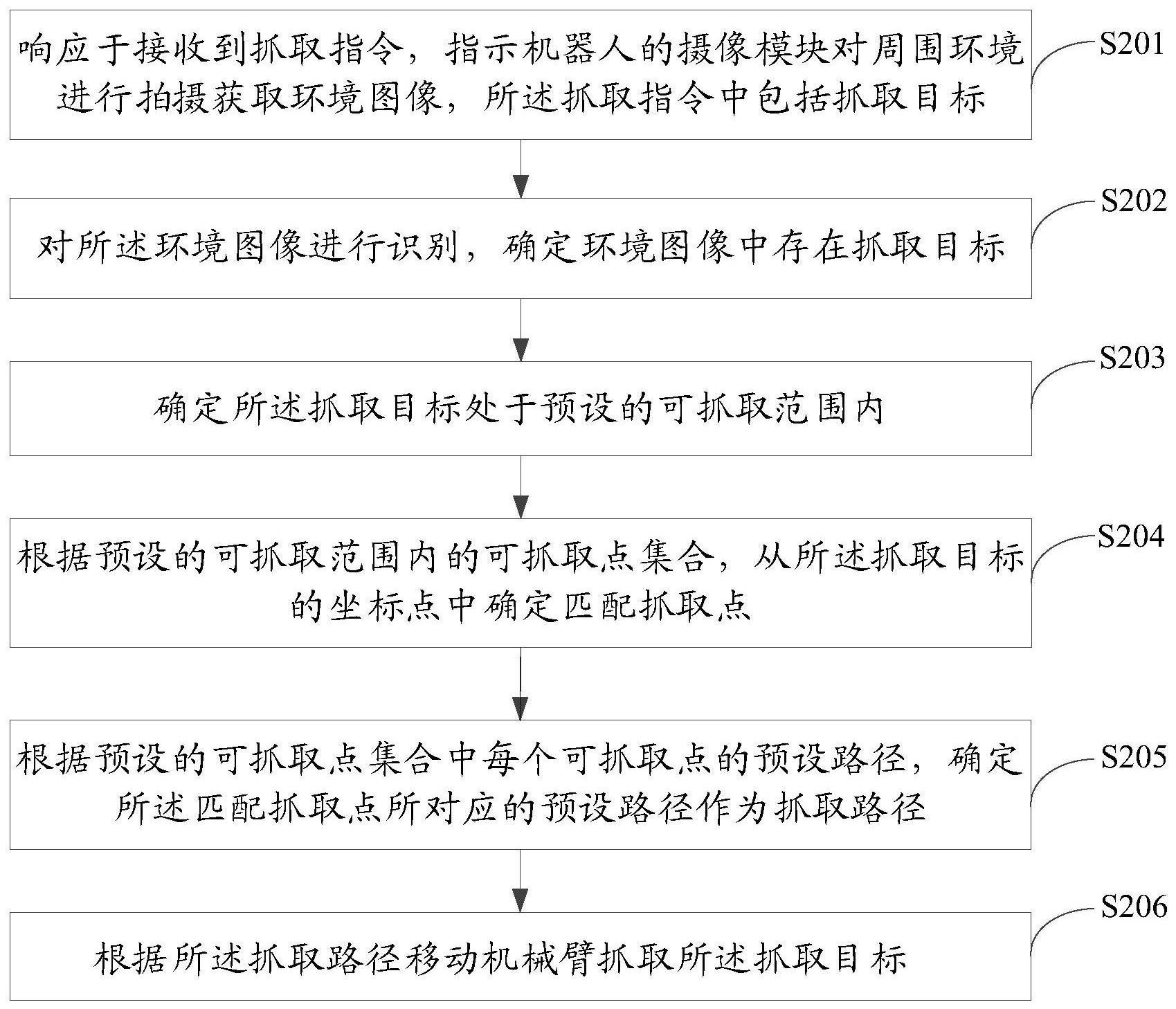
3、响应于接收到抓取指令,指示机器人的摄像模块对周围环境进行拍摄获取环境图像,所述抓取指令中包括抓取目标;
4、对所述环境图像进行识别,确定环境图像中存在所述抓取目标;
5、确定所述抓取目标处于预设的可抓取范围内;
6、根据预设的可抓取范围内的可抓取点集合,从所述抓取目标的坐标点中确定匹配抓取点;
7、根据预设的可抓取点集合中每个可抓取点的预设路径,确定所述匹配抓取点所对应的预设路径作为抓取路径;
8、根据所述抓取路径移动机械臂抓取所述抓取目标。
9、在一个实施例中,所述方法还包括:
10、通过在机器人可抓取范围内的可抓取三维空间中进行预设数量的随机采点,获取可抓取点集合;
11、对于可抓取点集合中的每个可抓取点,生成从机械臂抓取起始点到可抓取点的至少一条路径作为可抓取点的预设路径;
12、将每个可抓取点与对应的至少一条预设路径关联存储生成对应关系。
13、在一个实施例中,所述根据所述抓取路径移动机械臂抓取所述抓取目标,包括:
14、确定所述抓取路径的机械臂抓取起始点;
15、对机器人的形态进行微调,以使机械臂末端位于所述机械臂抓取起始点;
16、根据所述抓取路径移动机械臂抓取所述抓取目标。
17、在一个实施例中,所述确定所述匹配抓取点所对应的预设路径作为抓取路径,包括:
18、确定所述匹配抓取点所对应的预设路径是否存在障碍物;
19、将不存在障碍物的预设路径作为抓取路径。
20、在一个实施例中,所述方法还包括:
21、若所述匹配抓取点所对应的预设路径均存在障碍物,重新确定所述抓取目标的匹配抓取点。
22、在一个实施例中,确定所述抓取目标处于预设的可抓取范围内,包括:
23、根据所述抓取目标的深度信息或者与所述抓取目标的距离,确定所述抓取目标是否处于预设的可抓取范围内;其中,所述环境图像包括深度信息;
24、若所述抓取目标不处于预设的可抓取范围内,移动机器人本体使所述抓取目标处于预设的可抓取范围内。
25、在一个实施例中,所述对所述环境图像进行识别,确定环境图像中存在抓取目标,包括:
26、根据深度学习模型对所述环境图像进行识别,确定环境图像中存在抓取目标;其中,所述深度学习模型是预先通过深度学习网络对抓取目标的图片进行训练得到的。
27、根据本公开实施例的第二方面,提供一种抓取装置,所述装置包括:
28、第一获取模块,用于响应于接收到抓取指令,指示机器人的摄像模块对周围环境进行拍摄获取环境图像,所述抓取指令中包括抓取目标;
29、第一确定模块,用于对所述环境图像进行识别,确定环境图像中存在所述抓取目标;
30、第二确定模块,用于确定所述抓取目标处于预设的可抓取范围内;
31、第三确定模块,用于根据预设的可抓取范围内的可抓取点集合,从所述抓取目标的坐标点中确定匹配抓取点;
32、第四确定模块,用于根据预设的可抓取点集合中每个可抓取点的预设路径,确定所述匹配抓取点所对应的预设路径作为抓取路径;
33、抓取模块,用于根据所述抓取路径移动机械臂抓取所述抓取目标。
34、在一个实施例中,所述装置还包括:
35、第二获取模块,用于通过在机器人可抓取范围内的可抓取三维空间中进行预设数量的随机采点,获取可抓取点集合;
36、生成模块,用于对于可抓取点集合中的每个可抓取点,生成从机械臂抓取起始点到可抓取点的至少一条路径作为可抓取点的预设路径;
37、存储模块,用于将每个可抓取点与对应的至少一条预设路径关联存储生成对应关系。
38、在一个实施例中,所述抓取模块包括:
39、确定单元,用于确定所述抓取路径的机械臂抓取起始点;
40、调整单元,用于对机器人的形态进行微调,以使机械臂末端位于所述机械臂抓取起始点;
41、抓取单元,用于根据所述抓取路径移动机械臂抓取所述抓取目标。
42、根据本公开实施例的第三方面,提供一种抓取装置,包括:
43、处理器;
44、用于存储处理器可执行指令的存储器;
45、其中,所述处理器被配置为:
46、响应于接收到抓取指令,指示机器人的摄像模块对周围环境进行拍摄获取环境图像,所述抓取指令中包括抓取目标;
47、对所述环境图像进行识别,确定环境图像中存在所述抓取目标;
48、确定所述抓取目标处于预设的可抓取范围内;
49、根据预设的可抓取范围内的可抓取点集合,从所述抓取目标的坐标点中确定匹配抓取点;
50、根据预设的可抓取点集合中每个可抓取点的预设路径,确定所述匹配抓取点所对应的预设路径作为抓取路径;
51、根据所述抓取路径移动机械臂抓取所述抓取目标。
52、根据本公开实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机指令,其特征在于,该指令被处理器执行时实现上述任一项所述方法的步骤。
53、根据本公开实施例的第五方面,提供一种机器人,包括上述的抓取装置。
54、本申请提出的技术方案的有益效果:对于可以移动的机器人,首先通过拍摄图像确定是否存在抓取目标并确定抓取目标处于预设的可抓取范围,然后通过匹配抓取目标的坐标点来确定抓取点,进而获取对应的预设路径作为抓取路径。解决了不固定工作空间内物体的抓取问题,使得机器人可以结合自身的移动来抓取物体,并且确定抓取点以及抓取路径的方式实用高效。
55、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种抓取方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述抓取路径移动机械臂抓取所述抓取目标,包括:
4.根据权利要求1所述的方法,其特征在于,所述确定所述匹配抓取点所对应的预设路径作为抓取路径,包括:
5.根据权利要求4所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述确定所述抓取目标处于预设的可抓取范围内,包括:
7.根据权利要求1所述的方法,其特征在于,所述对所述环境图像进行识别,确定环境图像中存在抓取目标,包括:
8.一种抓取装置,其特征在于,所述装置包括:
9.根据权利要求8所述的装置,其特征在于,所述装置还包括:
10.根据权利要求9所述的装置,其特征在于,所述抓取模块包括:
11.一种抓取装置,其特征在于,包括:
12.一种计算机可读存储介质,其上存储有计算机指令,其特征在于,该指令被处理器执行时实现权利要求1-7中任一项所述方法的步骤。
13.一种机器人,其特征在于,包括权利要求8-10中任一项所述的抓取装置。
技术总结
本公开是关于一种抓取方法、装置和机器人,其中,方法包括:响应于接收到抓取指令,指示机器人的摄像模块对周围环境进行拍摄获取环境图像,所述抓取指令中包括抓取目标;对所述环境图像进行识别,确定环境图像中存在所述抓取目标;确定所述抓取目标处于预设的可抓取范围内;根据预设的可抓取范围内的可抓取点集合,从所述抓取目标的坐标点中确定匹配抓取点;根据预设的可抓取点集合中每个可抓取点的预设路径,确定所述匹配抓取点所对应的预设路径作为抓取路径;根据所述抓取路径移动机械臂抓取所述抓取目标。解决了不固定工作空间内物体的抓取问题,使得机器人可以结合自身的移动来抓取物体,并且确定抓取点以及抓取路径的方式实用高效。
技术研发人员:杨华,李欢华,詹犇,濮正楠,宋华,李庆
受保护的技术使用者:纯米科技(上海)股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!