一种工业机器人复合夹具
本发明涉及工业机器人,具体为一种工业机器人复合夹具。
背景技术:
1、随着机械自动化生产进程的加快,机加工生产的一线工人逐渐被工业机器人所替代,如搬运、装配、打包、焊接、切割等工厂作业所需的工序,工业机器人不仅能够提高机加工的工作效率,且能够降低工人的安全事故的发生。
2、实现工业应用的工序要求,必须在工业机器人上装配适用的夹具,工业机器人夹具一般只能适用于一种工种或者适用于一种规格型号的工件,每更换一次功能模块都要重新置换夹具,专机对应,适配性好,但无法做到单体多用,不利于成本的降低和工作效率的提高;而对于用于工业机器人的复合夹具来说,复合夹具包括多个不同类型的夹具,如气动夹具、吸盘夹具等,这些夹具的尺寸及构造不一,传统的复合夹具夹持范围不便进行调节,只能够夹持一种面积范围内的物体,会影响复合夹具的使用效果,为此,我们提出一种工业机器人复合夹具用于解决上述问题。
技术实现思路
1、本发明的目的在于提供一种工业机器人复合夹具,以解决上述背景技术中提出的问题。
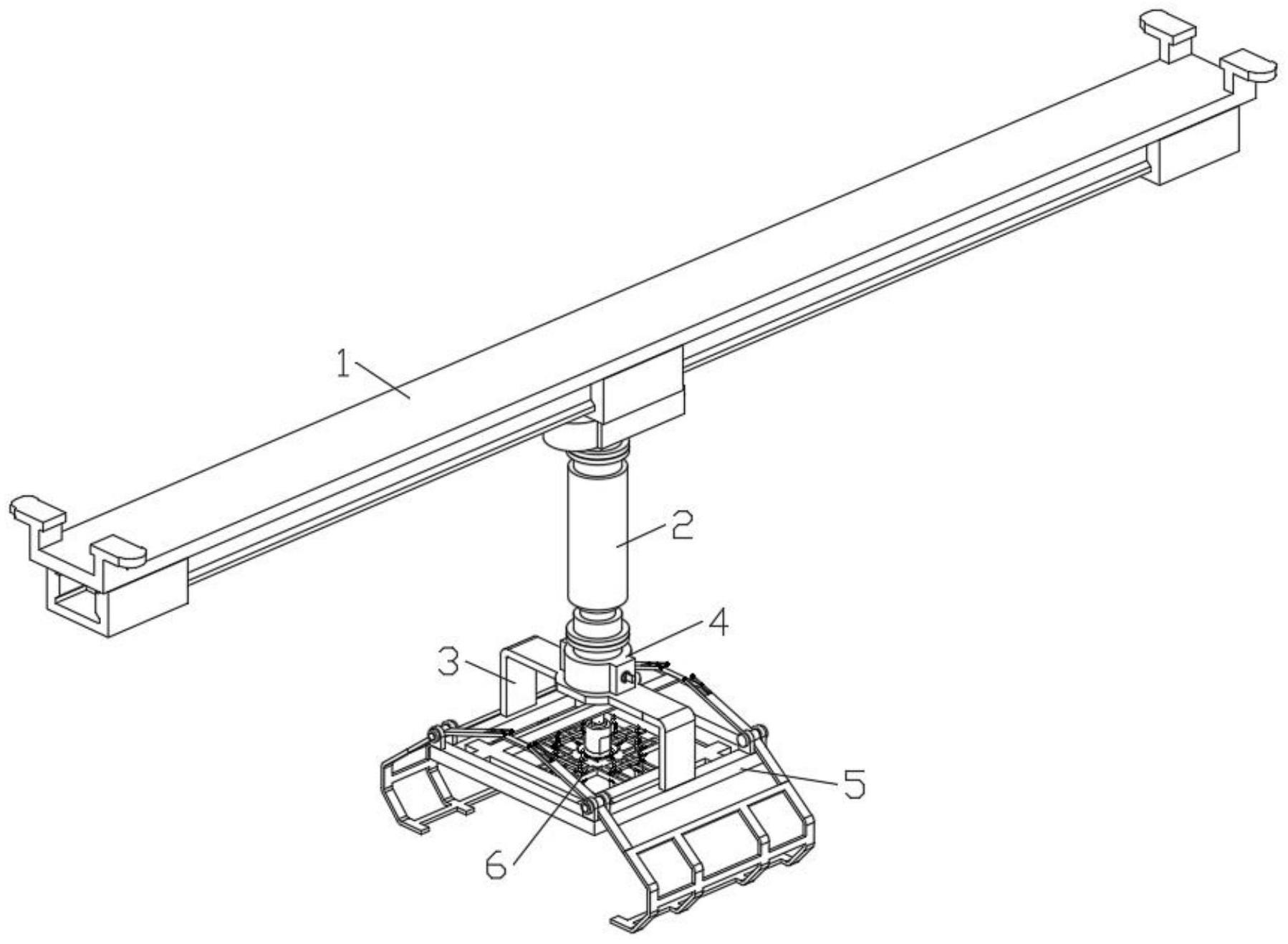
2、为实现上述目的,本发明提供如下技术方案:一种工业机器人复合夹具,包括安装架,所述安装架的底端固定安装有调节组件,所述调节组件的底端设有支架,所述调节组件、支架之间设有安装组件,所述支架的底端固定安装有外夹机构,所述外夹机构中固定安装有内夹机构。
3、优选地,所述外夹机构包括外夹框架,所述外夹框架呈口型框结构,所述外夹框架固定安装在支架的底端,所述外夹框架的顶端四角处均固定安装有转动座,所述转动座中转动安装有异形架,同侧两个所述异形架呈对称分布结构,同侧两个所述异形架的相对侧均开设有收纳槽,两个所述收纳槽之间滑动卡设有驱动架,所述驱动架的两端部均固定安装有卡柱,所述收纳槽的内侧均开设有和卡柱对应的卡条槽,且卡柱滑动卡接在对应的卡条槽中,相邻两个所述异形架远离驱动架的一侧均固定安装有夹爪,两个所述夹爪呈对称分布结构,两个所述驱动架之间固定安装有连接杆。
4、优选地,所述内夹机构包括内夹框架,所述内夹框架固定安装在外夹框架中,所述内夹框架的中部固定安装有调节架,所述调节架呈“井”字结构,所述调节架的四周均开设有对应的两个调节滑槽,所述调节滑槽中均滑动卡设有调节座,所述调节座的中部均固定插设有外管,所述外管的顶部延伸出调节座的顶端,所述外管的内侧顶部和底部均固定卡设有外环,两个所述外环之间滑动插设有内管,所述内管的外侧固定套设有内环,所述内环的下表面和底部外环的上表面接触,所述内环的顶端和顶部外环之间设有第一弹簧,所述第一弹簧活动套接在内管的外侧,所述内管的中部固定卡设有吸管,所述吸管的底部穿过内管的底端,所述吸管的底端固定安装有吸盘。
5、优选地,相邻两个所述外管的顶部均固定套设有连接架,所述连接架的中部均螺纹插设有调节螺杆,四个所述调节螺杆的相对部均转动套设有稳固座,所述稳固座的底端和调节架的顶端固定安装,四个所述调节螺杆的相对端均固定套设有传动齿轮。
6、优选地,所述调节架的中部固定卡设有第一底板,所述第一底板的顶端中部固定安装有驱动电机,所述驱动电机的驱动端固定安装有和传动齿轮配合使用的冠齿轮,多个所述传动齿轮的底部和冠齿轮啮合连接。
7、优选地,所述连接杆的底端中部固定安装有伸缩杆。
8、优选地,所述伸缩杆的底端固定安装有第二底板,所述第二底板的底端和多个稳固座的顶端固定安装。
9、优选地,所述调节组件包括直线电缸,所述直线电缸固定安装在安装架的底端,所述直线电缸的驱动端固定安装有旋转气缸,所述旋转气缸的驱动端固定安装有升降气缸。
10、优选地,所述安装组件包括卡固套框和卡座,所述卡固套框固定安装在支架的顶端中部,所述卡座固定安装在升降气缸的驱动端,所述卡座的底部活动卡接在卡固套框的中部,所述卡固套框的两侧均开设有作业穿槽,两个所述作业穿槽的内壁相背部均固定卡设有限位环,所述限位环的中部均活动卡设有固定柱,两个所述固定柱的相对侧均固定套设有卡环,所述卡环滑动卡接在对应作业穿槽中,所述卡环和限位环之间设有第二弹簧,所述第二弹簧活动套接在固定柱的外侧,两个所述固定柱的相对端均延伸进卡固套框的中部,所述卡座的外侧开设有和固定柱配合使用的固定槽,且两个固定柱相对端分别活动卡接在对应的固定槽中。
11、优选地,两个所述固定柱的相背端均延伸出卡固套框的外侧,两个所述固定柱的相背端均开设有抽拉槽。
12、与现有技术相比,本发明的有益效果在于:
13、1.通过设置外夹机构和内夹机构,能够灵活调节多个吸盘外轮廓组成的面积,便于多个吸盘对不同尺寸大小的物体进行定位,提升整个夹具的使用效果,配合两侧夹爪对物体进行夹持,提升物体定位的稳定性;
14、2.通过设置调节组件,灵活调节支架的水平位置和高度位置,进而调整外夹机构、内夹机构的水平位置和高度位置,便于对物体进行不同位置的运输,提升了整个夹具的使用效果;
15、3.通过设置安装组件,进行调节组件、支架和外夹机构、内夹机构之间的快速固定,且便于进行支架和外夹机构、内夹机构的快速拆卸。
技术特征:
1.一种工业机器人复合夹具,包括安装架(1),其特征在于:所述安装架(1)的底端固定安装有调节组件(2),所述调节组件(2)的底端设有支架(3),所述调节组件(2)、支架(3)之间设有安装组件(4),所述支架(3)的底端固定安装有外夹机构(5),所述外夹机构(5)中固定安装有内夹机构(6)。
2.根据权利要求1所述的一种工业机器人复合夹具,其特征在于:所述外夹机构(5)包括外夹框架(51),所述外夹框架(51)呈口型框结构,所述外夹框架(51)固定安装在支架(3)的底端,所述外夹框架(51)的顶端四角处均固定安装有转动座(52),所述转动座(52)中转动安装有异形架(53),同侧两个所述异形架(53)呈对称分布结构,同侧两个所述异形架(53)的相对侧均开设有收纳槽(531),两个所述收纳槽(531)之间滑动卡设有驱动架(54),所述驱动架(54)的两端部均固定安装有卡柱(541),所述收纳槽(531)的内侧均开设有和卡柱(541)对应的卡条槽(532),且卡柱(541)滑动卡接在对应的卡条槽(532)中,相邻两个所述异形架(53)远离驱动架(54)的一侧均固定安装有夹爪(55),两个所述夹爪(55)呈对称分布结构,两个所述驱动架(54)之间固定安装有连接杆(56)。
3.根据权利要求2所述的一种工业机器人复合夹具,其特征在于:所述内夹机构(6)包括内夹框架(61),所述内夹框架(61)固定安装在外夹框架(51)中,所述内夹框架(61)的中部固定安装有调节架(62),所述调节架(62)呈“井”字结构,所述调节架(62)的四周均开设有对应的两个调节滑槽(621),所述调节滑槽(621)中均滑动卡设有调节座(63),所述调节座(63)的中部均固定插设有外管(64),所述外管(64)的顶部延伸出调节座(63)的顶端,所述外管(64)的内侧顶部和底部均固定卡设有外环(641),两个所述外环(641)之间滑动插设有内管(642),所述内管(642)的外侧固定套设有内环(643),所述内环(643)的下表面和底部外环(641)的上表面接触,所述内环(643)的顶端和顶部外环(641)之间设有第一弹簧(644),所述第一弹簧(644)活动套接在内管(642)的外侧,所述内管(642)的中部固定卡设有吸管(645),所述吸管(645)的底部穿过内管(642)的底端,所述吸管(645)的底端固定安装有吸盘(646)。
4.根据权利要求3所述的一种工业机器人复合夹具,其特征在于:相邻两个所述外管(64)的顶部均固定套设有连接架(65),所述连接架(65)的中部均螺纹插设有调节螺杆(66),四个所述调节螺杆(66)的相对部均转动套设有稳固座(67),所述稳固座(67)的底端和调节架(62)的顶端固定安装,四个所述调节螺杆(66)的相对端均固定套设有传动齿轮(68)。
5.根据权利要求4所述的一种工业机器人复合夹具,其特征在于:所述调节架(62)的中部固定卡设有第一底板(69),所述第一底板(69)的顶端中部固定安装有驱动电机(691),所述驱动电机(691)的驱动端固定安装有和传动齿轮(68)配合使用的冠齿轮(681),多个所述传动齿轮(68)的底部和冠齿轮(681)啮合连接。
6.根据权利要求4所述的一种工业机器人复合夹具,其特征在于:所述连接杆(56)的底端中部固定安装有伸缩杆(57)。
7.根据权利要求6所述的一种工业机器人复合夹具,其特征在于:所述伸缩杆(57)的底端固定安装有第二底板(58),所述第二底板(58)的底端和多个稳固座(67)的顶端固定安装。
8.根据权利要求1所述的一种工业机器人复合夹具,其特征在于:所述调节组件(2)包括直线电缸(21),所述直线电缸(21)固定安装在安装架(1)的底端,所述直线电缸(21)的驱动端固定安装有旋转气缸(22),所述旋转气缸(22)的驱动端固定安装有升降气缸(23)。
9.根据权利要求8所述的一种工业机器人复合夹具,其特征在于:所述安装组件(4)包括卡固套框(41)和卡座(42),所述卡固套框(41)固定安装在支架(3)的顶端中部,所述卡座(42)固定安装在升降气缸(23)的驱动端,所述卡座(42)的底部活动卡接在卡固套框(41)的中部,所述卡固套框(41)的两侧均开设有作业穿槽(411),两个所述作业穿槽(411)的内壁相背部均固定卡设有限位环(43),所述限位环(43)的中部均活动卡设有固定柱(44),两个所述固定柱(44)的相对侧均固定套设有卡环(441),所述卡环(441)滑动卡接在对应作业穿槽(411)中,所述卡环(441)和限位环(43)之间设有第二弹簧(442),所述第二弹簧(442)活动套接在固定柱(44)的外侧,两个所述固定柱(44)的相对端均延伸进卡固套框(41)的中部,所述卡座(42)的外侧开设有和固定柱(44)配合使用的固定槽(421),且两个固定柱(44)相对端分别活动卡接在对应的固定槽(421)中。
10.根据权利要求9所述的一种工业机器人复合夹具,其特征在于:两个所述固定柱(44)的相背端均延伸出卡固套框(41)的外侧,两个所述固定柱(44)的相背端均开设有抽拉槽(443)。
技术总结
本发明公开了一种工业机器人复合夹具,具体涉及工业机器人技术领域,包括安装架,所述安装架的底端固定安装有调节组件,所述调节组件的底端设有支架,所述调节组件、支架之间设有安装组件,所述支架的底端固定安装有外夹机构,所述外夹机构中固定安装有内夹机构,本发明,通过设置外夹机构和内夹机构,能够灵活调节多个吸盘外轮廓组成的面积,便于多个吸盘对不同尺寸大小的物体进行定位,提升整个夹具的使用效果,配合两侧夹爪对物体进行夹持,提升物体定位的稳定性;通过设置调节组件,灵活调节支架的水平位置和高度位置,进而调整外夹机构、内夹机构的水平位置和高度位置,便于对物体进行不同位置的运输,提升了整个夹具的使用效果。
技术研发人员:卞华,朱子文,徐思远,马浩翔,胡佳苗,廖威,王宇轩
受保护的技术使用者:江苏航运职业技术学院
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!