一种模块化积木式可拆装串联机器人及其使用方法
本发明涉及串联机器人,尤其涉及一种模块化积木式可拆装串联机器人及其使用方法。
背景技术:
1、众所周知,串联机器人是一种开式运动链机器人,它是由一系列连杆通过转动关节或移动关节串联形成的。采用驱动器驱动各个关节的运动从而带动连杆的相对运动,使末端工作件达到合适的位姿。
2、经检索,授权公开号为cn208179519u公开的一种桌面型串联机器人,其包括:支撑组件、支撑臂和大臂,支撑组件包括支撑座和连接于支撑座上的滑杆,上述串联机器人在使用时,虽然降低了企业的经济负担,但其部件集中,难以组装和维修,为此提出一种模块化积木式可拆装串联机器人及其使用方法。
技术实现思路
1、本发明的目的是为了解决现有技术中存在串联机器人在使用时,虽然降低了企业的经济负担,但其部件集中,难以拆装和维修的缺点,而提出的一种模块化积木式可拆装串联机器人及其使用方法。
2、为了实现上述目的,本发明采用了如下技术方案:
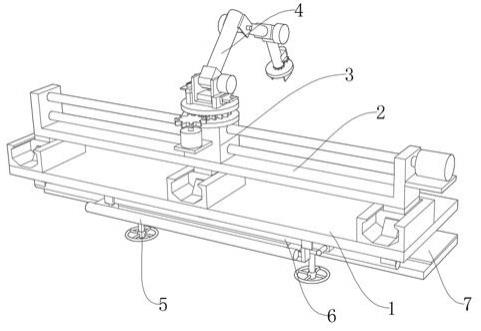
3、一种模块化积木式可拆装串联机器人,包括安装模块,所述安装模块包括安装板和多个导轨,多个所述导轨均固定连接在安装板的上表面;
4、调节模块,所述调节模块设置在安装模块的上方;
5、固定模块,固定模块位于调节模块的上方;
6、机器人模块,机器人模块设置在固定模块的上方。
7、进一步的,所述机器人模块为机械臂。
8、进一步的,所述调节模块包括多个滑块,多个所述滑块分别滑动连接在多个导轨内,多个所述滑块的顶部固定连接有同一个固定座,固定座两侧内壁之间转动连接有第一螺纹杆和导向杆,所述固定座的一侧固定连接有调节电机,所述调节电机输出轴的一端穿过固定座并与第一螺纹杆相固定,所述安装板的底部设有对滑块进行固定的固定机构。
9、进一步的,所述固定模块包括滑座,所述滑座滑动连接在导向杆的圆周,所述第一螺纹杆穿过滑座并与滑座螺纹连接,所述滑座的顶部转动连接有安装柱,安装柱的顶部固定连接有转盘,转盘的顶部设有安装座,所述机械臂设置在安装座内,所述安装座与转盘之间设有方便安装座拆卸的固定组件,所述滑座的一侧设有驱动转盘转动的驱动组件。
10、进一步的,所述固定组件包括两个定位板,两个所述定位板均固定连接在转盘的上表面,两个所述转盘之间插接有贯穿第一插板,第一插板的一端为斜面,所述第一插板的底部开设有卡槽,其中一个所述定位板的上表面插接有贯穿的插架,插架与定位板之间固定连接有第一拉簧,所述插架的底部固定连接有卡槽配合使用的卡柱。
11、进一步的,所述驱动组件包括驱动电机和两个齿轮,所述驱动电机固定连接在滑座的一侧,两个所述齿轮分别固定连接在驱动电机输出轴的一端和安装柱的圆周外壁,且两个所述齿轮啮合。
12、进一步的,所述固定机构包括压架,所述压架圆周的一侧固定连接有多个第二拉簧,所述第二拉簧的另一端与安装板的底部相固定,所述压架圆周的一侧固定连接有多个楔形块,多个楔形块的顶部分别穿过安装板和导轨,所述安装板的底部设有对压架进行限位的限位机构,所述安装板的底部设有对安装板进行固定的夹持模块。
13、进一步的,所述限位机构包括两个导向块,两个所述导向块均固定连接在安装板的底部,两个所述导向块之间滑动连接有第二插板,第二插板的底部固定连接有两个限位架。
14、进一步的,所述夹持模块包括两个第二螺纹杆,两个第二螺纹杆均转动连接在安装板的底部,两个所述第二螺纹杆的圆周螺纹贯穿有同一个夹板,夹板的上表面固定连接有防滑垫。
15、本发明还提出一种模块化积木式可拆装串联机器人的使用方法,包括以下步骤:
16、s1:安装板安装,安装时,将安装板放置在安装台面上,然后转动第二螺纹杆,第二螺纹杆带动夹板上升,通过夹板和安装板对安装台面进行夹持,使安装板得到固定;
17、s2:固定座固定,固定时,将滑块对应导轨,然后插入到导轨中,滑块与楔形块接触后,推动楔形块向下移动,脱离接触后,楔形块在第二拉簧的拉动下复位,通过楔形块卡住滑块,使得固定座固定不动;
18、s3:对压架进行限制,限制时,推动第二插板在导向块内滑动,通过限位架避免压架和楔形块移动;
19、s4:安装安装座,安装时,将安装座放置在两个定位板之间,然后将第一插板插入定位板中,第一插板的一端与卡柱接触后,推动卡柱向下移动,随后卡柱卡入到第一插板底部的卡槽中,从而完成对安装座的固定,而机械臂则提前安装在安装座上,拆除时,下压插架使卡柱脱离卡槽即可;
20、s5:启动驱动电机,驱动电机通过两个齿轮带动转盘转动,而启动调节电机,调节电机带动第一螺纹杆转动,进而使机械臂进行移动。
21、与现有技术相比,本发明的有益效果是:
22、1.本发明通过安装模块、调节模块、固定模块等之间的配合使用,使得产品能够模块化,进而快速简便的进行拆卸,提高安装效率和维修效率。
23、2.本发明通过在安装板的底部安装限位机构的设置,使得推动第二插板能够带动限位架移动至压架的下方,避免压架向下移动,从而防止了工作人员误碰触,导致楔形块的脱离与滑块的卡接。
24、3.本发明通过在安装板的底部安装夹持模块的设置,使得通过转动第二螺纹杆能够带动夹板进行移动,进而通过夹板和安装板对安装台面进行夹持固定,固定方式简单便捷。
25、4.本发明通过在安装板的底部安装楔形块、压架和第二拉簧的设置,使得向下拉动压架,能够带动楔形块移动,进而使固定座能够快速的被取出,方便工作人员的操作。
26、本发明中使产品能够模块化,进而快速简便的进行拆卸,提高安装效率和维修效率,同时防止工作人员误碰触压架,提高产品使用的安全,还通过夹板和安装板对安装台面进行夹持固定,固定方式简单便捷。
技术特征:
1.一种模块化积木式可拆装串联机器人,其特征在于,包括安装模块(1),所述安装模块(1)包括安装板(101)和多个导轨(102),多个所述导轨(102)均固定连接在安装板(101)的上表面;
2.根据权利要求1所述的一种模块化积木式可拆装串联机器人,其特征在于,所述固定模块(3)包括滑座(8),所述滑座(8)滑动连接在导向杆(21)的圆周,所述第一螺纹杆(20)穿过滑座(8)并与滑座(8)螺纹连接,所述滑座(8)的顶部转动连接有安装柱,安装柱的顶部固定连接有转盘(9),转盘(9)的顶部设有安装座(11),所述机械臂(12)设置在安装座(11)内,所述安装座(11)与转盘(9)之间设有方便安装座(11)拆卸的固定组件,所述滑座(8)的一侧设有驱动转盘(9)转动的驱动组件。
3.根据权利要求2所述的一种模块化积木式可拆装串联机器人,其特征在于,所述固定组件包括两个定位板(10),两个所述定位板(10)均固定连接在转盘(9)的上表面,两个所述转盘(9)之间插接有贯穿第一插板(13),第一插板(13)的一端为斜面,所述第一插板(13)的底部开设有卡槽,其中一个所述定位板(10)的上表面插接有贯穿的插架(14),插架(14)与定位板(10)之间固定连接有第一拉簧(15),所述插架(14)的底部固定连接有卡槽配合使用的卡柱(26)。
4.根据权利要求2所述的一种模块化积木式可拆装串联机器人,其特征在于,所述驱动组件包括驱动电机(16)和两个齿轮(17),所述驱动电机(16)固定连接在滑座(8)的一侧,两个所述齿轮(17)分别固定连接在驱动电机(16)输出轴的一端和安装柱的圆周外壁,且两个所述齿轮(17)啮合;
5.根据权利要求5所述的一种模块化积木式可拆装串联机器人,其特征在于,所述限位机构(6)包括两个导向块(27),两个所述导向块(27)均固定连接在安装板(101)的底部,两个所述导向块(27)之间滑动连接有第二插板(28),第二插板(28)的底部固定连接有两个限位架(29)。
6.根据权利要求5所述的一种模块化积木式可拆装串联机器人,其特征在于,所述夹持模块(7)包括两个第二螺纹杆(31),两个第二螺纹杆(31)均转动连接在安装板(101)的底部,两个所述第二螺纹杆(31)的圆周螺纹贯穿有同一个夹板(30),夹板(30)的上表面固定连接有防滑垫(32)。
7.根据权利要求1-7任意一项所述的一种模块化积木式可拆装串联机器人的使用方法,其特征在于,包括以下步骤:
技术总结
本发明属于串联机器人领域,尤其是一种模块化积木式可拆装串联机器人及其使用方法,针对现有的串联机器人在使用时,其部件集中,难以拆装和维修的问题,现提出如下方案,其包括安装模块,所述安装模块包括安装板和多个导轨,多个所述导轨均固定连接在安装板的上表面,本发明还提出一种模块化积木式可拆装串联机器人的使用方法,包括以下步骤:S1:安装板安装,安装时,将安装板放置在安装台面上,然后转动第二螺纹杆,第二螺纹杆带动夹板上升,本发明中使产品能够模块化,进而快速简便的进行拆卸,提高安装效率和维修效率,同时防止工作人员误碰触压架,提高产品使用的安全,还通过夹板和安装板对安装台面进行夹持固定,固定方式简单便捷。
技术研发人员:张涛,吴延荣
受保护的技术使用者:山东建筑大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!