一种听障人士交互机器人的制作方法
本发明涉及家用机器人领域,具体是指一种听障人士交互机器人。
背景技术:
1、我专门调查了所在社区的听障群体、听力下降的老年人。了解到大部分听障人群最苦恼是居家时有人打电话他们听不到,听力下降的老年人用不了智能手机,儿女与他们的交流受阻。这使得他们很孤独,这个弱势群体迫切需要像正常人一样与外界沟通。
2、因此一种能够解决听障人士沟通困难的交互机器人亟待被研究。
技术实现思路
1、本发明要解决的技术问题是,针对以上问题提供一种听障人士交互机器人。
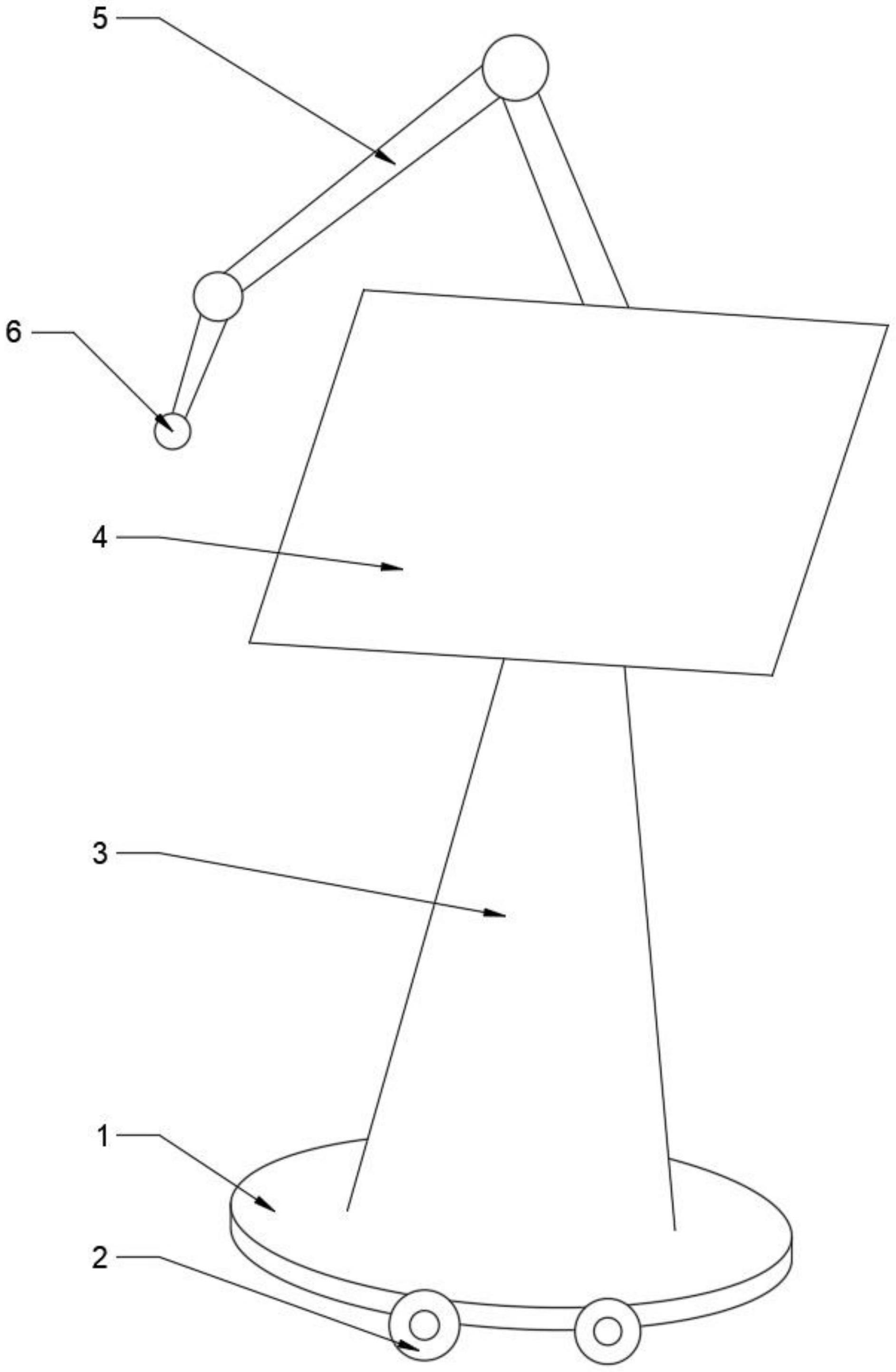
2、为解决上述技术问题,本发明提供的技术方案为:一种听障人士交互机器人,包括底座,所述底座底部设有万向轮,底座顶部固定连接有机体支撑,机体支撑顶部安装有显示屏,显示屏上安装有前置摄像头,方便沟通交流,显示屏背部安装有机械臂,机械臂端部设有震动装置。
3、作为改进,机体支撑内部设有单片机,单片机上安装有无线发射器和障碍检测器,单片机上还安装有语音识别转换器、监视仪器、报警装置和目标定位器,单片机无线连接独立定位器,机体支撑内部还设有机器人动力和电源,通过障碍检测器提供高精度的避障功能。
4、障碍传感器包括但不限于毫米波雷达、摄像头和超声波雷达,经过多种雷达的测距再加上机器本身的学习能力,在室内可以做到绘制房子地图,提升移动效率。
5、语音识别转换可以实现对于通话过程中对话的文字识别和显示,将对话以文字的形式展现给听障人士。
6、监视仪器可以辅助机器快速定位使用者的同时,还能够记录使用者的手语进行手语转换或者实时传输,还可以进行摔倒检测,可以帮助使用者向正常人求救。
7、报警装置可于危急时刻使用,还能够在使用者有通话请求时提供灯光提示,保证了通话能够被使用者接听,结合监视仪器,在使用者摔倒或者遇到危险时,可以发出声光报警。
8、目标定位器和独立定位器能够得到机器位置和使用者位置,可以传输至使用者监护人的手机上,还能够互相定位,通信规则采用网络和蓝牙等多种方式,可以在室内和室外进行切换,保证精确性。
9、作为改进,显示屏铰接在机体支撑顶部,连接处设有旋转关节,方便调整显示屏角度,使用起来更加方便,不仅能够调节屏幕正面的角度,还可以旋转屏幕做到横竖屏切换。
10、作为改进,机械臂为三节机械臂,动力采用电机驱动,电源在机体支撑内,采用电动控制的机械臂可以在摄像头的帮助下精准找到使用者,并且进行震动提醒。
11、作为改进,障碍检测器数量若干,均匀分布在底座周围。
12、本发明与现有技术相比的优点在于:机器本身的结构可以实现像扫地机器人的避障功能,结合使用者身上的定位装置,可以实现跟随、在规定时间出现以及呼叫出现等功能,机身内部的传感器,提供了技术支持,机器本身考虑听障人士进行了多渠道的信息交互,具有良好的市场前景。
技术特征:
1.一种听障人士交互机器人,包括底座(1),其特征在于:所述底座(1)底部设有万向轮(2),底座(1)顶部固定连接有机体支撑(3),机体支撑(3)顶部安装有显示屏(4),显示屏上安装有前置摄像头,显示屏(4)背部安装有机械臂(5),机械臂(5)端部设有震动装置(6)。
2.根据权利要求1所述的一种听障人士交互机器人,其特征在于:机体支撑(3)内部设有单片机,单片机上安装有无线发射器和障碍检测器,单片机上还安装有语音识别转换器、监视仪器、报警装置和目标定位器,单片机无线连接独立定位器,机体支撑(3)内部还设有机器人动力和电源。
3.根据权利要求1所述的一种听障人士交互机器人,其特征在于:显示屏(4)铰接在机体支撑(3)顶部,连接处设有旋转关节,方便调整显示屏角度。
4.根据权利要求1所述的一种听障人士交互机器人,其特征在于:机械臂(5)为三节机械臂,动力采用电机驱动,电源在机体支撑(3)内。
5.根据权利要求2所述的一种听障人士交互机器人,其特征在于:障碍检测器数量若干,均匀分布在底座(1)周围。
技术总结
本发明公开了一种听障人士交互机器人,包括底座,所述底座底部设有万向轮,底座顶部固定连接有机体支撑,机体支撑顶部安装有显示屏,显示屏上安装有前置摄像头,方便沟通交流,显示屏背部安装有机械臂,机械臂端部设有震动装置。本发明与现有技术相比的优点在于:机器本身的结构可以实现像扫地机器人的避障功能,结合使用者身上的定位装置,可以实现跟随、在规定时间出现以及呼叫出现等功能,机身内部的传感器,提供了技术支持,机器本身考虑听障人士进行了多渠道的信息交互,具有良好的市场前景。
技术研发人员:高思妍
受保护的技术使用者:高思妍
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!