用于协同机器人的控制方法、装置、处理器及系统与流程
本申请涉及机器人控制领域,具体地涉及一种用于协同机器人的控制方法、装置、存储介质、处理器及系统。
背景技术:
1、目前,通常采用人工目测的方式对电气柜的装配质量进行检测。例如,检测人员可以按照设计图纸和物料装配清单人工核对电气柜中元器件的规格、型号、安装位置以及接线是否正确等。而电气柜体积大,且内部涉及到的微小器件较多,若通过人工目测难以准确判定器件装配是否存在问题,且所需的人力成本和时间成本较高,检测效率较低,甚至可能出现漏检或者错检的情况,检测精度不高。
技术实现思路
1、本申请实施例的目的是提供一种用于协同机器人的控制方法、装置、存储介质、处理器及系统。
2、为了实现上述目的,本申请第一方面提供一种用于协同机器人的控制方法,协同机器人包括机械臂,方法包括:
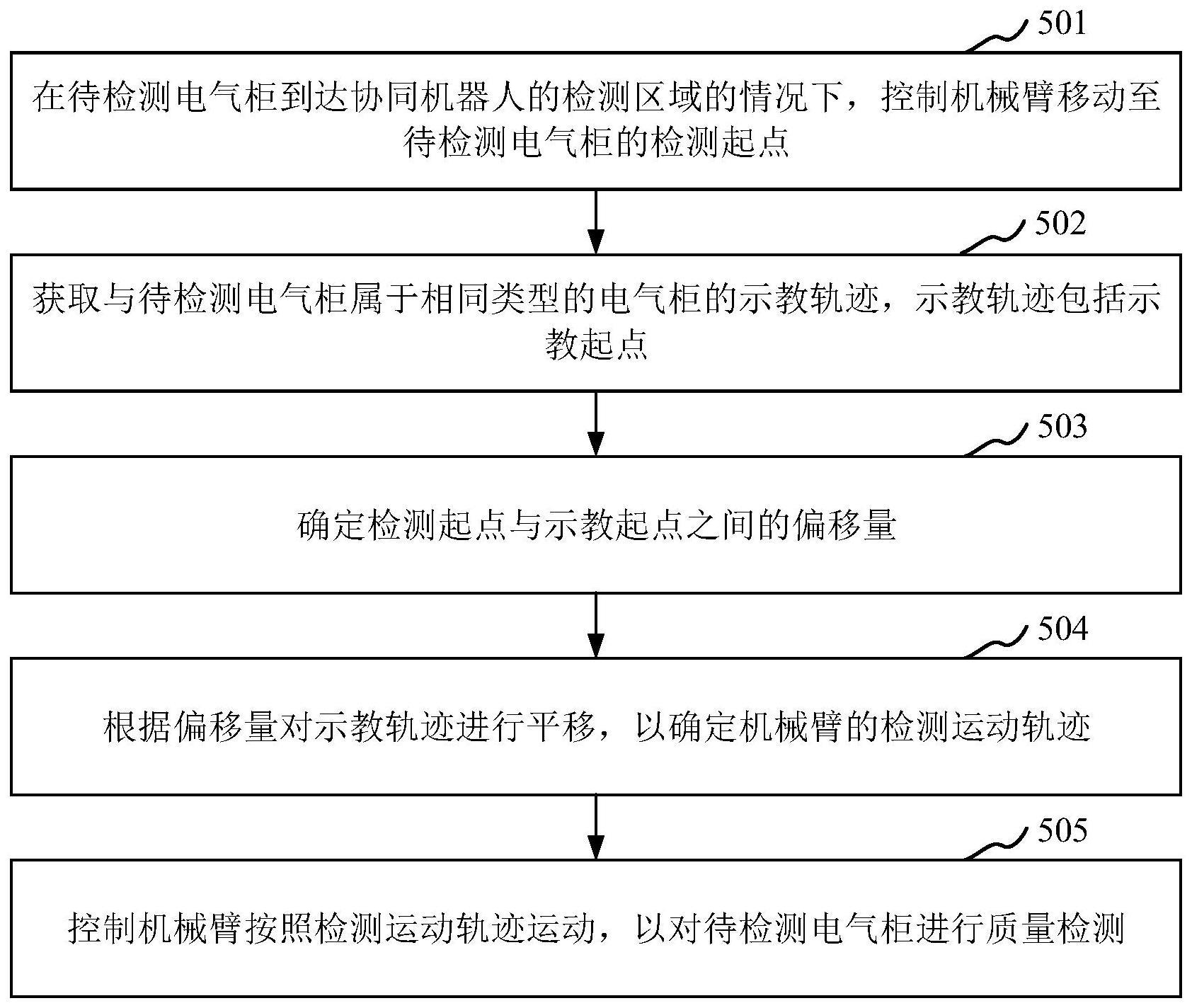
3、在待检测电气柜到达协同机器人的检测区域的情况下,控制机械臂移动至待检测电气柜的检测起点;
4、获取与待检测电气柜属于相同类型的电气柜的示教轨迹,示教轨迹包括示教起点;
5、确定检测起点与示教起点之间的偏移量;
6、根据偏移量对示教轨迹进行平移,以确定机械臂的检测运动轨迹;
7、控制机械臂按照检测运动轨迹运动,以对待检测电气柜进行质量检测。
8、在本申请实施例中,协同机器人还包括图像采集设备,图像采集设备安装在机械臂的末端,其中,检测运动轨迹包括多个检测点,控制机械臂按照检测运动轨迹运动,以对待检测电气柜进行质量检测包括:控制机械臂从检测起点出发;机械臂按照检测运动轨迹运动的过程中,在机械臂到达每个检测点时控制图像采集设备启动采集任务,以采集待检测电气柜中待检测器件的待检测图像;按照与检测点对应的检测内容对检测点采集到的待检测图像进行图像识别,以确定每个待检测图像中的待检测器件以及待检测器件的检测信息,其中,检测点是示教轨迹包含的示教轨迹点平移偏移量得到的;针对每个待检测器件,将待检测器件的检测信息与检测点对应的目标信息进行对比,以对待检测电气柜进行质量检测。
9、在本申请实施例中,将每个待检测器件的检测信息与检测点对应的目标信息进行对比,以对待检测电气柜进行质量检测包括:在每个待检测器件的检测信息与对应的目标信息一致的情况下,确定待检测电气柜的质量检测结果为合格;在存在至少一个待检测器件的检测信息与对应的目标信息不一致的情况下,确定待检测电气柜的质量检测结果为不合格。
10、在本申请实施例中,方法还包括:在确定待检测电气柜的质量检测结果之后,将质量检测结果发送至人机交互设备,以通过人机交互设备的交互界面显示质量检测结果。
11、在本申请实施例中,协同机器人还包括图像采集设备,图像采集设备安装在机械臂的末端,方法还包括:针对每个类型的多个电气柜,从多个电气柜中选取一台电气柜作为示教电气柜;控制机械臂移动至示教电气柜所在的目标区域,并控制图像采集设备启动采集任务,以采集与示教电气柜中全部器件对应的示教图像;确定示教电气柜中需要进行检测的器件,并确定器件在示教图像中的图像位置;根据图像位置确定针对示教电气柜的示教轨迹,示教轨迹包括示教起点、示教终点以及从示教起点至示教终点之间的多个示教轨迹点。
12、在本申请实施例中,方法还包括:在确定针对示教电气柜的示教轨迹之后,依次对在每个示教轨迹点拍摄到的器件图像标注示教检测内容,以按照示教检测内容对待检测电气柜进行质量检测;其中,示教检测内容包括器件图像中器件的器件类型、器件规格、器件位置、器件表面字符以及器件颜色。
13、在本申请实施例中,方法还包括:存储每个示教轨迹点的器件图像的示教检测内容,并将每个示教轨迹点对应的示教检测内容作为对应的检测点的检测内容。
14、本申请第二方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令在被处理器执行时使得处理器被配置成执行上述的用于协同机器人的控制方法。
15、本申请第三方面提供一种处理器,被配置成执行上述的用于协同机器人的控制方法。
16、本申请第四方面提供一种用于协同机器人的控制装置,包括上述的处理器。
17、本申请第五方面提供一种用于协同机器人的控制系统,控制系统包括:
18、协同机器人,协同机器人包括机械臂,用于对待检测电气柜进行质量检测;
19、人机交互设备,包括交互界面,用于显示质量检测结果;以及
20、上述的用于协同机器人的控制装置。
21、通过上述技术方案,能够通过协同机器人对电气柜的装配质量进行检测,大幅度提高检测电气柜的装配质量的检测效率和检测精度,避免人工参与检测而出现漏检和错检的情况,减少电气柜质量检测所需的人力成本和时间成本。且,能够对不同类型的电气柜进行批量检测,操作方便快捷,还能对电气柜中的器件进行追溯,以对影响装配质量的器件及时进行调整。
22、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种用于协同机器人的控制方法,其特征在于,所述协同机器人包括机械臂,所述方法包括:
2.根据权利要求1所述的用于协同机器人的控制方法,其特征在于,所述协同机器人还包括图像采集设备,所述图像采集设备安装在所述机械臂的末端,其中,所述检测运动轨迹包括多个检测点,所述控制机械臂按照所述检测运动轨迹运动,以对所述待检测电气柜进行质量检测包括:
3.根据权利要求2所述的用于协同机器人的控制方法,其特征在于,所述将每个待检测器件的检测信息与所述检测点对应的目标信息进行对比,以对所述待检测电气柜进行质量检测包括:
4.根据权利要求3所述的用于协同机器人的控制方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的用于协同机器人的控制方法,其特征在于,所述协同机器人还包括图像采集设备,所述图像采集设备安装在所述机械臂的末端,所述方法还包括:
6.根据权利要求5所述的用于协同机器人的控制方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的用于协同机器人的控制方法,其特征在于,所述方法还包括:
8.一种机器可读存储介质,该机器可读存储介质上存储有指令,其特征在于,该指令在被处理器执行时使得所述处理器被配置成执行根据权利要求1至7中任一项所述的用于协同机器人的控制方法。
9.一种处理器,其特征在于,被配置成执行根据权利要求1至7中任意一项所述的用于协同机器人的控制方法。
10.一种的用于协同机器人的控制装置,其特征在于,所述控制装置包括根据权利要求9所述的处理器。
11.一种用于协同机器人的控制系统,其特征在于,所述控制系统包括:
技术总结
本申请实施例提供一种用于协同机器人的控制方法、装置、处理器及系统。方法包括:在待检测电气柜到达协同机器人的检测区域的情况下,控制机械臂移动至待检测电气柜的检测起点;获取与待检测电气柜属于相同类型的电气柜的示教轨迹,示教轨迹包括示教起点;确定检测起点与示教起点之间的偏移量;根据偏移量对示教轨迹进行平移,以确定机械臂的检测运动轨迹;控制机械臂按照检测运动轨迹运动,以对待检测电气柜进行质量检测。通过上述技术方案,能够通过协同机器人对电气柜的装配质量进行检测,提高检测电气柜的装配质量的检测效率和检测精度,避免人工参与检测而出现漏检和错检的情况,减少人力成本和时间成本,能对不同类型的电气柜进行批量检测。
技术研发人员:刘红玉,虢彦,宋晓波,肖雅倩,周遵梅
受保护的技术使用者:中科云谷科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!