机器人控制方法、装置、机器人及存储介质与流程
本发明涉及自动控制,尤其涉及机器人控制方法、机器人控制装置、机器人及存储介质。
背景技术:
1、随着机器人的发展,机器人的运送货物产品的场景越来越复杂多变,存在需要配送水盆等易倾洒液体的物品。机器人在配送时根据运行速度移动。然而,当路面颠簸时,机器人在移动配送过程中容易将液体震荡溅出,运送物品过程无法保障物品稳定性。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种机器人控制方法、机器人控制装置、机器人及存储介质,旨在运送物品过程保障物品稳定性。
2、为实现上述目的,本发明提供一种机器人控制方法,所述机器人控制方法包括以下步骤:
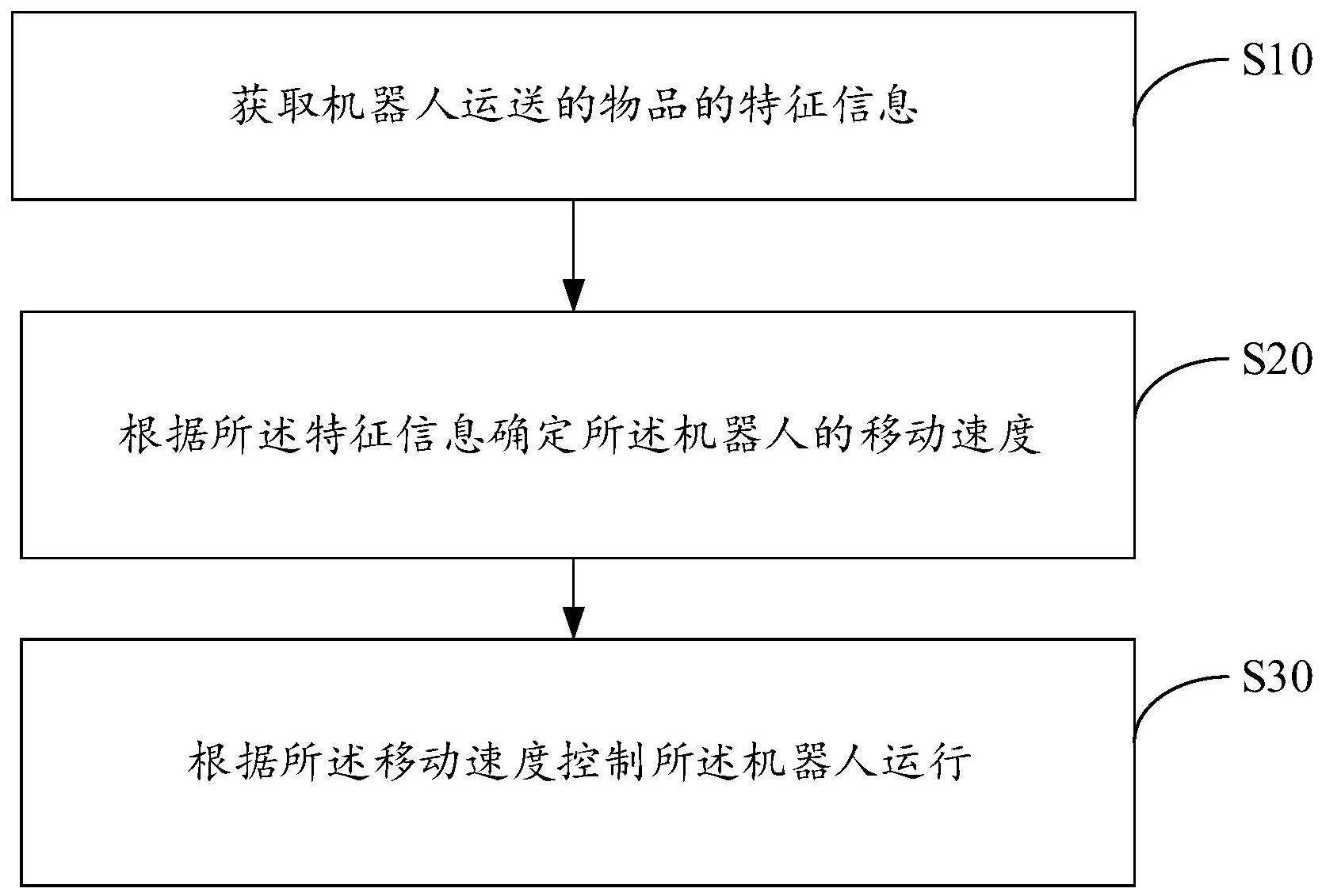
3、获取机器人运送的物品的特征信息;
4、根据所述特征信息确定所述机器人的移动速度;
5、根据所述移动速度控制所述机器人运行。
6、可选地,所述物品包括装载有液体的容器,所述特征信息包括高度差,所述高度差为容器的开口与液体的液面之间的高度差值;
7、所述根据所述特征信息确定所述机器人的移动速度的步骤包括:
8、当所述高度差小于或等于第一预设高度时,确定第一预设速度为所述移动速度;
9、当所述高度差大于第一预设高度,且所述高度差小于或等于第二预设高度时,确定第二预设速度为所述移动速度;
10、当所述高度差大于第二预设高度时,确定第三预设速度为所述移动速度;
11、其中,所述第一预设高度小于所述第二预设高度,所述第一预设速度小于所述第二预设速度,所述第二预设速度小于所述第三预设速度。
12、可选地,所述特征信息包括物品的重量;
13、所述根据所述特征信息确定所述机器人的移动速度的步骤包括:
14、当所述重量小于或等于第一预设重量时,确定第四预设速度为所述移动速度;
15、当所述重量大于第一预设重量,且小于或等于第二预设重量时,确定第五预设速度为所述移动速度;
16、当所述重量大于第二预设重量时,确定第六预设速度为所述移动速度;
17、其中,所述第一预设重量小于所述第二预设重量,所述第四预设速度小于所述第五预设速度,所述第五预设速度小于所述第六预设速度。
18、可选地,所述物品包括装载有液体的容器,所述容器在各个高度设置有刻度,所述特征信息包括高度差,所述高度差为容器的开口与液体的液面之间的高度差值;
19、所述获取机器人运送的物品的特征信息的步骤包括:
20、获取所述物品的图像信息;
21、根据所述图像信息确定所有所述刻度中的最大刻度和所述液体的液面在所有所述刻度中达到的目标刻度;
22、确定所述目标刻度对应的高度与最大刻度对应的高度的差值为所述高度差。
23、可选地,特征信息还包括液面波动程度;
24、获取机器人运送的物品的特征信息的步骤包括:
25、获取容器内的液体的液面波动程度;
26、相应地,根据所述特征信息确定所述机器人的移动速度的步骤,包括:
27、根据液体的液面波动程度调整所述机器人的移动速度,其中,在液体的液面波动程度满足预设条件时,则调整所述机器人的移动速度为0,以使机器人停止移动以静置消化液面波动。
28、可选地,所述获取机器人运送的物品的特征信息的步骤包括:
29、当所述物品为装载有液体的容器时,获取所述物品对应的高度差为所述特征信息,所述高度差为容器的开口与液体的液面之间的高度差值;
30、当所述物品为装载有非液体的容器时,获取所述物品的重量为所述特征信息。
31、可选地,所述获取机器人运送的物品的特征信息的步骤包括:
32、当所述物品的重量发生变化时,获取所述物品的特征信息;
33、当所述物品的重量未发生变化时,停止获取所述物品的特征信息。
34、此外,为实现上述目的本发明还提供一种机器人控制装置,所述机器人控制装置包括:
35、获取模块,用于获取机器人运送的物品的特征信息;
36、确定模块,用于根据所述特征信息确定所述机器人的移动速度;
37、控制模块,用于根据所述移动速度控制所述机器人运行。
38、此外,为实现上述目的,本发明还提供一种机器人,所述机器人包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机器人控制程序,所述机器人控制程序配置为实现上述任一项所述的机器人控制方法的步骤。
39、此外,为实现上述目的,本发明还提供一种存储介质,所述存储介质上存储有机器人控制程序,所述机器人控制程序被处理器执行时实现上述任一项所述的机器人控制方法的步骤。
40、本发明提出一种机器人控制方法,该方法获取机器人运送物品的特征信息;根据所述特征信息确定所述机器人的移动速度;根据所述移动速度控制所述机器人运行。相比目前在配送时根据运行速度移动,本申请根据物品的特征信息确定机器人的移动速度,确定了符合当前物品状态的移动速度,这里的移动速度并不是固定不变的,而是根据当前物品的实际情况调整的,根据所述移动速度控制所述机器人运行,使得机器人在所述移动速度下不容易将液体震荡溅出,从而在运送物品过程保障物品稳定性。
技术特征:
1.一种机器人控制方法,其特征在于,所述机器人控制方法包括以下步骤:
2.如权利要求1所述的机器人控制方法,其特征在于,所述物品包括装载有液体的容器,所述特征信息包括高度差,所述高度差为容器的开口与液体的液面之间的高度差值;
3.如权利要求1所述的机器人控制方法,其特征在于,所述特征信息包括物品的重量;
4.如权利要求1所述的机器人控制方法,其特征在于,所述物品包括装载有液体的容器,所述容器在各个高度设置有刻度,所述特征信息包括高度差,所述高度差为容器的开口与液体的液面之间的高度差值;
5.如权利要求2所述的机器人控制方法,其特征在于,特征信息还包括液面波动程度;
6.如权利要求1所述的机器人控制方法,其特征在于,所述获取机器人运送的物品的特征信息的步骤包括:
7.如权利要求1所述的机器人控制方法,其特征在于,所述获取机器人运送的物品的特征信息的步骤包括:
8.一种机器人控制装置,其特征在于,所述机器人控制装置包括:
9.一种机器人,其特征在于,所述机器人包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机器人控制程序,所述机器人控制程序配置为实现如权利要求1至7中任一项所述的机器人控制方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有机器人控制程序,所述机器人控制程序被处理器执行时实现如权利要求1至7任一项所述的机器人控制方法的步骤。
技术总结
本发明公开了一种机器人控制方法、机器人控制装置、机器人及存储介质,属于自动控制技术领域。其中,该机器人控制方法包括:获取机器人运送的物品的特征信息;根据所述特征信息确定所述机器人的移动速度;根据所述移动速度控制所述机器人运行。本申请实现了运送物品过程保障物品稳定性。
技术研发人员:罗沛,周洪辉
受保护的技术使用者:深圳优地科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!