大幅面玻璃搬运用桁架机器人的制作方法
本发明属于桁架机器人,具体涉及大幅面玻璃搬运用桁架机器人。
背景技术:
1、玻璃在生产完成后,尤其是大幅面玻璃,需要进行搬运,现有技术中的大幅面玻璃一般是利用桁架机器人进行搬运。桁架机器人又称直角坐标机器人,是指能够实现自动控制的、可重复编程的、多自由度的操作机,其工作的行为方式主要是通过完成沿着x、y、z轴上的线性运动来进行。
2、现有的桁架机器人一般由执行系统、驱动系统、操控系统还有方位检测系统等部件构成,其中,执行系统承担着主要的操作任务,它的部件有很多,如机械手、手腕、手臂、立柱等。针对大幅面玻璃搬运的桁架机器人,其执行系统上还需要设置真空吸盘,真空吸盘上设有吸附孔,即通过将吸盘的接管与真空设备(真空发生器)接通,然后与大幅面玻璃接触,启动真空设备抽吸。吸附孔使吸盘内产生负气压,从而将大幅面玻璃吸牢,即可开始搬送大幅面玻璃。当大幅面玻璃搬送完成后,通吸附孔向吸盘内充气,使吸盘内由负气压变成零气压或稍为正的气压,吸盘就脱离大幅面玻璃,从而完成提升搬送大幅面玻璃的任务。
3、但现有技术中部分桁架机器的真空吸盘在使用时,无法将大幅面玻璃上的杂质进行清理,进而使得真空吸盘的吸附孔容易因吸入杂质而发生阻塞现象,导致真空吸盘无法正常工作,降低大幅面玻璃搬送时的吸附牢固性,增加大幅面玻璃掉落损坏的概率,从而影响用户的使用体验。
4、因此,针对上述技术问题,有必要提供大幅面玻璃搬运用桁架机器人。
技术实现思路
1、本发明的目的在于提供大幅面玻璃搬运用桁架机器人,以解决现有技术中桁架机器人真空吸盘不能清理大幅面玻璃上杂质的问题。
2、为了实现上述目的,本发明一实施例提供了一种大幅面玻璃搬运用桁架机器人,包括执行机械臂和一对高压清理机构;
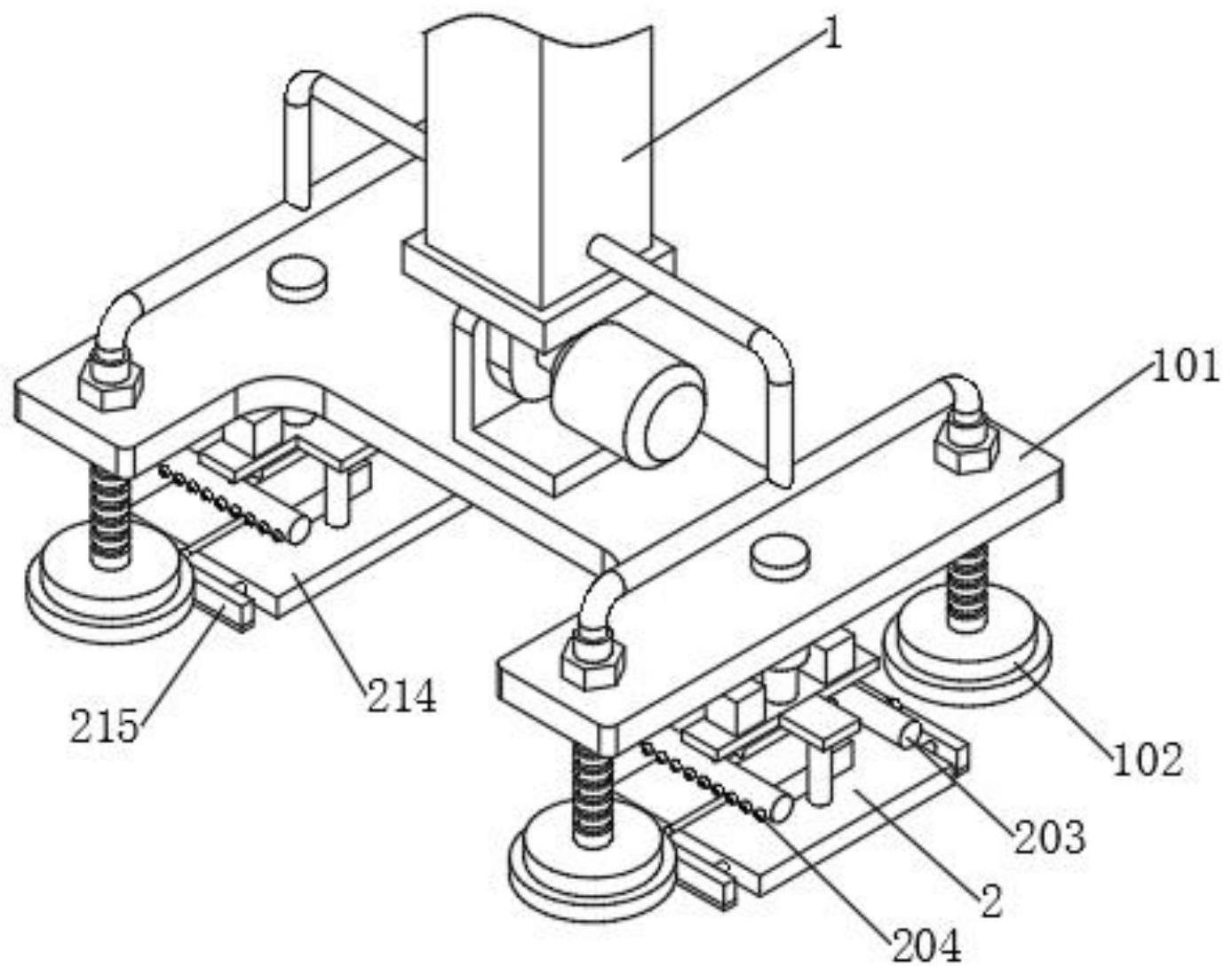
3、所述执行机械臂的下端转动连接有安装架,所述安装架上安装有多个真空吸盘,一对所述高压清理机构对称安装在所述安装架上,且与所述真空吸盘相对应设置,所述高压清理机构包括气缸,所述气缸自由端连接有安装板,所述安装板的下侧设有一对直管,所述直管上连接有多个均匀分布的喷头,一对所述直管之间连接有连接管,所述安装板上设有高压气泵,所述高压气泵与连接管之间连接有输气管,所述气缸上还安装有辅助清理机构。
4、进一步地,所述真空吸盘的数量为四个,便于保证真空吸盘对大幅面玻璃的吸附固定效果,使得大幅面玻璃能够被安全的搬运,每两个所述真空吸盘为一组,一对所述真空吸盘关于执行机械臂的中轴线对称设置,使得大幅面玻璃能够受力均匀,进而保证执行机械臂吸附固定大幅面玻璃的牢固性,避免出现偏重的情况。
5、进一步地,所述气缸的最大伸展长度大于所述真空吸盘高度,保证直管上的喷头能够对真空吸盘待吸附的大幅面玻璃区域进行高压清理,避免大幅面玻璃粘附杂质,进而降低真空吸盘上吸附孔被阻塞的概率,保证真空吸盘能够正常运行;
6、所述安装板与所述直管之间连接有加强筋,用于连接固定安装板和直管;
7、所述加强筋的外侧设有防腐层,保证加强筋的使用寿命。
8、进一步地,所述直管的长度大于所述真空吸盘的最大直径,使得直管上的喷头能够完全高压清理真空吸盘待吸附大幅面玻璃的区域,避免待吸附大幅面玻璃区域粘附杂质,降低真空吸盘上吸附孔被阻塞的概率,保证真空吸盘的安全运行,进而可以保证大幅面玻璃的吸附固定效果,避免大幅面玻璃掉落损坏。
9、进一步地,一对所述直管关于所述气缸对称设置,所述喷头与所述真空吸盘相对应设置,利用直管上的喷头来高压清理大幅面玻璃表面的杂质。
10、进一步地,所述辅助清理机构包括存液箱,用于存储加湿液;
11、所述存液箱内设有加湿液,加湿液通过释放管进入到连接管内,与连接管内的高压气体混合,并通过喷头喷射出,用于加湿大幅面玻璃表面,以便清洁布的擦拭,同时也可以真空吸盘更好的吸附大幅面玻璃;
12、所述存液箱上连接有释放管,用于输送加湿液,所述释放管与所述连接管连接管相连接。
13、进一步地,所述释放管上安装有控制阀,当控制阀打开时,加湿液通过释放管进入到连接管内,以便加湿液跟随连接管内的高压气体一同喷射出,用于加湿大幅面玻璃。
14、进一步地,所述安装板的一对侧壁上均固定连接有支板,所述支板上连接有连接杆,所述连接杆的另一端连接有底板,通过支板和连接杆的相互配合,用于固定底板。
15、进一步地,所述底板的两侧均设有清洁板,用于安装清洁布;
16、所述清洁板上连接有清洁布,所述清洁板与所述真空吸盘相对应设置,清洁布用于擦拭加湿后的大幅面玻璃,进一步降低大幅面玻璃粘附杂质的概率,以便真空吸盘更好的吸附大幅面玻璃,避免大幅面玻璃的脱落;
17、所述底板内设有双头气缸,所述双头气缸自由端与清洁板相连接,用于控制清洁板的移动,进而可以利用清洁板带动清洁布进行移动,实现清洁布对大幅面玻璃的擦拭。
18、进一步地,所述底板上设有加热器,所述加热器上连接有一对输热管,所述输热管的另一端与所述清洁板相连接,所述清洁板内部中空设置,所述清洁板下底壁设有多个通孔,加热器产生热量,热量经过输热管进入到清洁板内,再通过通孔加热清洁布,使得清洁布干燥,保证清洁布对大幅面玻璃的擦拭效果。
19、与现有技术相比,本发明可以对大幅面玻璃上的杂质进行清理,使得桁架机器人的真空吸盘不易吸入杂质,进而降低真空吸盘吸附孔被阻塞的概率,保证真空吸盘正常工作,进而可以保证大幅面玻璃搬送时的吸附牢固性,降低大幅面玻璃掉落损坏的概率,便于用户使用。
技术特征:
1.一种大幅面玻璃搬运用桁架机器人,其特征在于,包括:
2.根据权利要求1所述的大幅面玻璃搬运用桁架机器人,其特征在于,所述真空吸盘的数量为四个,每两个所述真空吸盘为一组,一对所述真空吸盘关于执行机械臂的中轴线对称设置。
3.根据权利要求1所述的大幅面玻璃搬运用桁架机器人,其特征在于,所述气缸的最大伸展长度大于所述真空吸盘高度,所述安装板与所述直管之间连接有加强筋,所述加强筋的外侧设有防腐层。
4.根据权利要求1所述的大幅面玻璃搬运用桁架机器人,其特征在于,所述直管的长度大于所述真空吸盘的最大直径。
5.根据权利要求1所述的大幅面玻璃搬运用桁架机器人,其特征在于,一对所述直管关于所述气缸对称设置,所述喷头与所述真空吸盘相对应设置。
6.根据权利要求1所述的大幅面玻璃搬运用桁架机器人,其特征在于,所述辅助清理机构包括存液箱,所述存液箱内设有加湿液,所述存液箱上连接有释放管,所述释放管与所述连接管相连接。
7.根据权利要求6所述的大幅面玻璃搬运用桁架机器人,其特征在于,所述释放管上安装有控制阀。
8.根据权利要求1所述的大幅面玻璃搬运用桁架机器人,其特征在于,所述安装板的一对侧壁上均固定连接有支板,所述支板上连接有连接杆,所述连接杆的另一端连接有底板。
9.根据权利要求8所述的大幅面玻璃搬运用桁架机器人,其特征在于,所述底板的两侧均设有清洁板,所述清洁板上连接有清洁布,所述清洁板与所述真空吸盘相对应设置,所述底板内设有双头气缸,所述双头气缸自由端与清洁板相连接。
10.根据权利要求9所述的大幅面玻璃搬运用桁架机器人,其特征在于,所述底板上设有加热器,所述加热器上连接有一对输热管,所述输热管的另一端与所述清洁板相连接,所述清洁板内部中空设置,所述清洁板下底壁设有多个通孔。
技术总结
本发明公开了大幅面玻璃搬运用桁架机器人,包括执行机械臂和一对高压清理机构,执行机械臂的下端转动连接有安装架,安装架上安装有多个真空吸盘;一对高压清理机构对称安装在安装架上,且与真空吸盘相对应设置,高压清理机构包括气缸,气缸自由端连接有安装板,安装板的下侧设有一对直管,直管上连接有多个均匀分布的喷头,一对直管之间连接有连接管。本发明通过相应机构的设置,可以对大幅面玻璃上的杂质进行清理,使得桁架机器人的真空吸盘不易吸入杂质,进而降低真空吸盘吸附孔被阻塞的概率,保证真空吸盘正常工作,进而可以保证大幅面玻璃搬送时的吸附牢固性,降低大幅面玻璃掉落损坏的概率,便于用户使用。
技术研发人员:黄和平,夏冬君,魏海龙
受保护的技术使用者:江苏圣和亚自动化设备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!