工业机器人健康评估方法、系统、终端和介质与流程
本发明涉及工业机器人,具体地,涉及一种工业机器人健康评估方法、系统、终端和介质。
背景技术:
1、目前工业机器人的应用企业普遍不具备自主、完全的维护能力,当机器人出现故障停机时,需要外部供应商到现场进行诊断和维护,会耽误大量的生产时间,严重些可能影响企业的生产节拍,进一步加剧停工企业的损失。其中伺服电机是工业机器人中的易损核心部件,因此,可靠的伺服电机健康评估方法对保证工业机器人高效稳定的运行非常必要。
2、经过检索发现:
3、申请公开号为cn110919657a的专利,公开一种基于大数据的工业机器人预测性状态监控方法,该专利在给定时间周期节拍动作内,仅以监控变量的最大最小值作为参考,忽视了机器人运动在时间尺度的变化,因为存在监控变量数值大小合理但动作变形的情况,尤其在工业机器人长期服役过程中绝对定位精度下降的情况下,监控变量的最大最小是值的参考价值会被削弱。
4、申请公开号为cn108638128a的专利,公开一种工业机器人的实时异常监测方法及其系统,该专利实现异常监测所利用的定位偏差、电流边界、极差、方差等是互不相关的人为设计的离散型特征,会受到人为经验的约束,局限了故障判别的程度,无法挖掘深层次故障,无法充分表征原始状态,存在原理上的局限性,也就无法对于后续的维保工作进行指导,且该专利并未明确阐述其不同参数对结果的贡献率和实际效果。
5、申请公开号为cn114454213a的专利,公开一种基于eemd-ht-峭度分析的工业机器人关节电流信号异常检测方法,该专利仅从信号imf真分量的包络信号峭度出发进行故障诊断,该指标仅对冲击信号尤其是表面损伤类信号较为敏感,无法覆盖电机其他类型的故障,具有较大局限性;另外,该专利对信号来源的描述未作工况考量和区分,不同工况下电机性能的差异会对结果产生较大影响,结果可靠性会因此降低。
6、此外,现有技术中还通过电流感应技术配合智能分析算法对机器人故障部位进行故障预警,但是该方法未构建对机器人的控制闭环,需要针对机器人目标工作节拍独立建档,且机器人工作路径、轨迹规划和负载水平并不统一。在不同工况下,同一型号机器人评估结果的一致性无法保证。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种工业机器人健康评估方法、系统、终端和介质。
2、根据本发明的第一方面,提供一种工业机器人健康评估方法,该方法包括:
3、基于预设的控制指令,获取初始状态下伺服电机的电流信号时间序列数据,得到标准时序;
4、基于所述预设的控制指令,获取当前状态下伺服电机的电流信号时间序列数据;
5、根据初始状态和当前状态对应的伺服电机的电流信号时间序列数据,进行相似性度量;
6、根据相似性度量的结果,评估工业机器人的健康水平。
7、进一步地,所述基于预设的控制指令,其中:所述预设的控制指令包括工业机器人各关节独立运动的控制指令以及各关节同步运动的控制指令。
8、进一步地,所述基于预设的控制指令,获取初始状态下伺服电机的电流信号时间序列数据,包括:
9、以固定周期发送所述控制指令,工业机器人根据所述控制指令执行相应的动作和轨迹,得到初始状态数据;
10、根据所述初始状态数据,得到初始状态下伺服电机在固定周期下的电流信号时间序列数据。
11、进一步地,基于所述预设的控制指令,获取当前状态下伺服电机的电流信号时间序列数据,包括:
12、在任一固定的非生产时间点向工业机器人发送所述控制指令,工业机器人根据所述控制指令执行相应的动作和轨迹,得到当前状态数据;
13、不断累增所述当前状态数据,得到按时间顺序排列的伺服电机的电流信号时间序列数据,即为状态数据库。
14、进一步地,根据初始状态和当前状态对应的伺服电机的电流信号时间序列数据,进行相似性度量,包括:
15、调取所述状态数据库中指定时间区间的电流信号时间序列数据,对于各个关节的电机,基于时序相似性度量方法计算其与标准时序的时序相似性度量值,得到关于各关节的健康评估值的评估结果。
16、进一步地,在所述得到关于各关节的健康评估值的评估结果之后,包括:综合不同控制指令下的评估结果得到综合健康评估结果,所述综合健康评估结果包括表征工业机器人整机健康水平的综合健康值,以及表征各关节电机健康水平的关节电机健康值。
17、进一步地,在所述综合不同控制指令下的评估结果得到综合健康评估结果之后,包括:将所述综合健康评估结果推送至用户。
18、根据本发明的第二方面,提供一种工业机器人健康评估系统,该系统包括:
19、第一信号获取模块:基于预设的控制指令,获取初始状态下伺服电机的电流信号时间序列数据;
20、第二信号获取模块:基于所述预设的控制指令,获取当前状态下伺服电机的电流信号时间序列数据;
21、相似性度量模块:根据初始状态和当前状态对应的伺服电机的电流信号时间序列数据,进行相似性度量;
22、评估模块:根据相似性度量的结果,评估工业机器人的健康水平。
23、根据本发明的第三方面,提供一种电子终端,包括存储器、处理器及存储在存储器上并能在处理器上运行的计算机程序,所述处理器执行所述程序时用于执行上述的工业机器人健康评估方法。
24、根据本发明的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时用于执行上述的工业机器人健康评估方法。
25、与现有技术相比,本发明具有如下至少之一的有益效果:
26、1、本发明利用电流原始时序信号进行分析,而非采用具有局限性的人工特征,从而可以在原理上提高健康评估水平的上限;而且,通过电流时序信号可以将工业机器人的评估粒度从整机细分到具体关节的电机,从而可以直接指导维保工作。
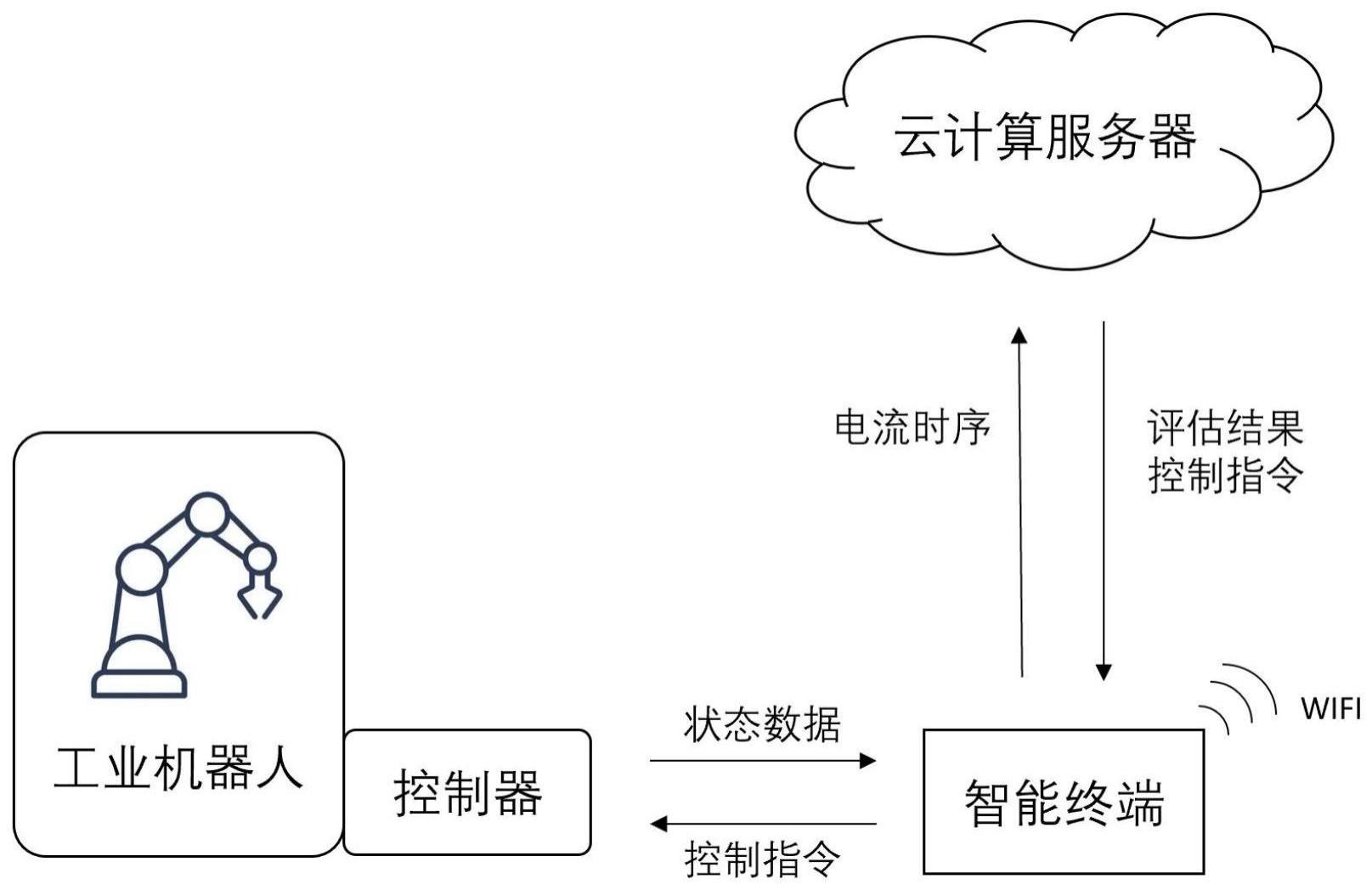
27、2、本发明引入机器人控制方法,基于预设的控制指令获取初始状态和当前状态下伺服电机的电流信号时间序列数据,可以随时对工业机器人当前状态进行健康评估;而且,可以针对典型工况或指定工况进行信号获取,从而排除不同工况对结果可靠性的影响;此外,通过控制指令可以构建统一的工作路径、动作节拍,从而可以保证机器人工作的一致性和可靠性,进而提高评估结果的准确度。
技术特征:
1.一种工业机器人健康评估方法,其特征在于,包括:
2.根据权利要求1所述的工业机器人健康评估方法,其特征在于,所述基于预设的控制指令,其中:所述预设的控制指令包括工业机器人各关节独立运动的控制指令以及各关节同步运动的控制指令。
3.根据权利要求1所述的工业机器人健康评估方法,其特征在于,所述基于预设的控制指令,获取初始状态下伺服电机的电流信号时间序列数据,包括:
4.根据权利要求2所述的工业机器人健康评估方法,其特征在于,基于所述预设的控制指令,获取当前状态下伺服电机的电流信号时间序列数据,包括:
5.根据权利要求4所述的工业机器人健康评估方法,其特征在于,根据初始状态和当前状态对应的伺服电机的电流信号时间序列数据,进行相似性度量,包括:
6.根据权利要求5所述的工业机器人健康评估方法,其特征在于,在所述得到关于各关节的健康评估值的评估结果之后,包括:综合不同控制指令下的评估结果得到综合健康评估结果,所述综合健康评估结果包括表征工业机器人整机健康水平的综合健康值,以及表征各关节电机健康水平的关节电机健康值。
7.根据权利要求6所述的工业机器人健康评估方法,其特征在于,在所述综合不同控制指令下的评估结果得到综合健康评估结果之后,包括:将所述综合健康评估结果推送至用户。
8.一种工业机器人健康评估系统,其特征在于,包括:
9.一种电子终端,包括存储器、处理器及存储在存储器上并能在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时用于执行权利要求1-7任一项所述的工业机器人健康评估方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时用于执行权利要求1-7任一项所述的工业机器人健康评估方法。
技术总结
本发明提供一种工业机器人健康评估方法、系统、终端和介质,该方法包括:基于预设的控制指令,获取初始状态下伺服电机的电流信号时间序列数据;基于所述预设的控制指令,获取当前状态下伺服电机的电流信号时间序列数据;根据初始状态和当前状态对应的伺服电机的电流信号时间序列数据,进行相似性度量;根据相似性度量的结果,评估工业机器人的健康水平。本发明可以将工业机器人的评估粒度从整机细分到具体关节的电机,提高评估结果的准确度。
技术研发人员:徐传超,刘成良,陶建峰,丁浩伦
受保护的技术使用者:上海智能制造功能平台有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!