一种防脱落机械抓手
本发明涉及机械手,特别涉及一种防脱落机械抓手。
背景技术:
1、随着我国科研水平的提高、医学技术的发展,生物样本库的规模也逐渐扩大,对生物样本转移的需求日益增大。
2、然而现有技术中,机械抓手通过对待夹持的物品施加两个相对的夹紧力,从而依靠摩擦力将物品夹紧。然而对于部分物品,其允许施加的最大夹紧力是受到限制的,而夹紧力不足则会导致机械夹爪夹不紧的情况发生,进而导致物品在抓取过程中从机械抓手中脱落。对于生物样本来说,其通常具有高价值的特点,如其在抓取过程中发生脱落则会造成较大的损失。
3、针对以上痛点,现有技术中有能够在抓取过程中防止物品脱落的机械抓手,例如,公告号为cn217890983u的中国发明专利,其公开了一种led灯铝制外壳生产用卸料机械手,包括固定架、动力件、连接件、夹爪组件和防掉落件,所述固定架上配合设置有动力件,所述动力件上滑动连接有连接件,所述连接件滑动连接在固定架的腔体内,所述连接件上配合连接有夹爪组件,所述固定架的两侧均转动连接有防掉落件。其中,防掉落件由挡板、转动轴、齿轮、齿条和气缸组成,所述挡板通过转动轴转动连接在固定架上,所述转动轴中心部位处的挡板上固定连接有齿轮,所述齿轮与齿条啮合设置,所述齿条滑动连接在固定架上,所述齿条的一端固定连接在气缸的活塞杆上,所述气缸固定连接在固定架上。
4、可以看出,该专利中,防掉落件通过挡板的翻转运动来从一侧承托被抓取的物品,然而这种方式对物品的尺寸具有一定的限制,譬如当物品的尺寸较大时,挡板翻转的角度会受到物品的阻挡,导致挡板无法翻转到位,因此难以有效地对物品进行承托。导致该专利实际使用范围受限。而生物样本库中通常会存放多种尺寸规格的生物样本,这使得上述专利公开的技术方案无法满足使用要求,故而本申请提出一种带有能够适用于多种尺寸规格的具有防滑落保护结构的机械抓手。
技术实现思路
1、针对现有技术存在的机械手防掉落保护结构难以适用于多种尺寸规格的物品的问题,本发明的目的在于提供一种防脱落机械抓手,以便于至少部分地解决上述问题。
2、为实现上述目的,本发明的技术方案为:
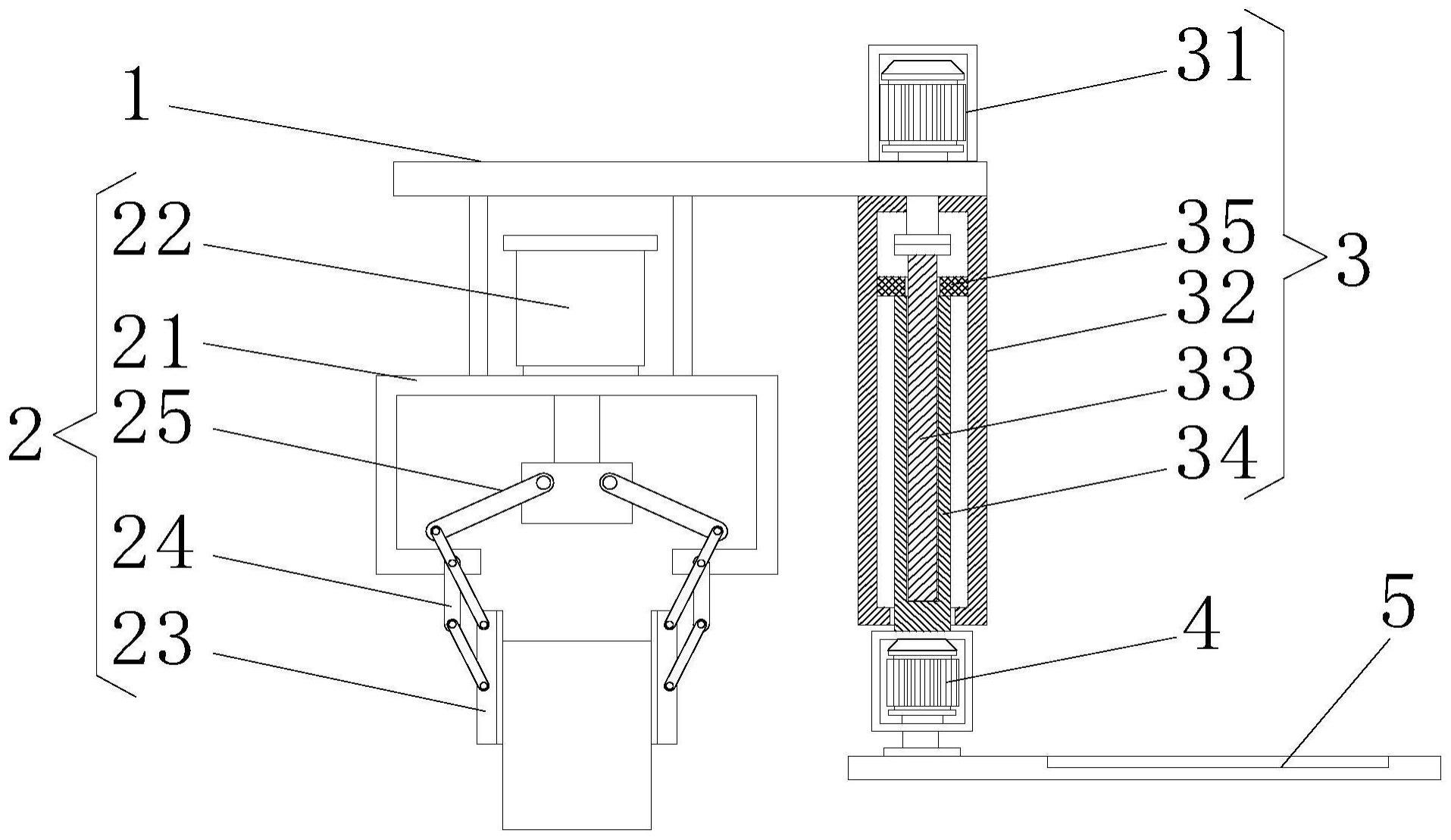
3、一种防脱落机械抓手,包括安装座和机械夹爪,所述机械夹爪固定在所述安装座上;所述安装座上还固定有第一竖向驱动机构,所述第一竖向驱动机构的输出端固定安装有旋转驱动机构,所述旋转驱动机构的输出轴上固定有防护托板;所述防护托板的转动轴线竖直,且所述机械夹爪在竖直方向上的投影位于所述防护托板的转动范围内。
4、在一优选实施例中,所述第一竖向驱动机构包括第一电机、连接框、第一螺杆、螺纹套管和导向件;所述第一电机与所述连接框均相对于所述安装座固定;所述第一螺杆与所述第一电机的输出轴传动连接,所述螺纹套管的上部旋拧在所述第一螺杆上、下部在穿过开设在所述连接框上的通孔后与所述旋转驱动机构相连接;所述导向件固定在所述螺纹套管上,且所述导向件沿竖直方向相对于所述连接框滑动连接。
5、在一优选实施例中,所述连接框呈封闭式构造,所述第一螺杆以及所述导向件均位于所述连接框的内部;所述连接框的上部开设有供所述第一电机的输出轴穿过的轴孔、下部开设有供所述螺纹套管穿过的通孔。
6、在一优选实施例中,所述第一电机与所述连接框分别位于所述安装座的顶面和底面;所述安装座上开设有供所述第一电机的输出轴穿过的轴孔。
7、在一优选实施例中,所述旋转驱动机构包括第三电机。
8、在一优选实施例中,所述防护托板呈水平状布置,且所述防护托板的顶面设置有承接凹槽。
9、在一优选实施例中,所述机械夹爪包括基座、伸缩驱动机构、夹板、平行四边形连杆机构和连杆;所述基座固定在所述安装座上,所述伸缩驱动机构竖向布置并固定在所述基座上;所述平行四边形连杆机构有两个并相对地枢转连接在所述基座上;所述平行四边形连杆机构的下端均固定有所述夹板、上端均通过所述连杆与所述伸缩驱动机构的输出端相连接。
10、在一优选实施例中,还包括机架、滑动座以及第二竖向驱动机构;所述滑动座沿水平方向滑动连接在所述机架上,所述机架上还安装有用于带动所述滑动座滑动的水平驱动机构;所述第二竖向驱动机构固定安装在所述滑动座上,所述安装座固定在所述第二竖向驱动机构的输出端上。
11、在一优选实施例中,所述水平驱动机构包括第二电机和第二螺杆,所述第二螺杆呈水平状布置并可转动连接在所述机架上,所述第二电机固定安装在所述机架上,且所述第二电机的输出轴与所述第二螺杆传动连接;其中,所述滑动座上开设有与所述第二螺杆相适配的螺孔,或者所述滑动座上固定有与所述第二螺杆相适配的螺母。
12、在一优选实施例中,所述第二竖向驱动机构为电动推杆。
13、采用上述技术方案,本发明的有益效果在于:由于第一竖向驱动机构、旋转驱动机构和防护托板的设置,使得机械抓手在抓取物品后,通过第一竖向驱动机构、旋转驱动机构和防护托板的配合,即能够使防护托板能够从底面一侧对被抓取的物品进行托底,避免物品从机械抓手中脱落后直接掉落在地面上而摔坏的情况发生,确保在物品搬运过程中,物品周向方向上能够得到机械抓手的夹持、下方一侧能够得到防护托板的承托,因此不会发生因颠簸等原因造成从机械抓手上脱落的情况,从而有效地保护物品。
技术特征:
1.一种防脱落机械抓手,其特征在于:包括安装座和机械夹爪,所述机械夹爪固定在所述安装座上;所述安装座上还固定有第一竖向驱动机构,所述第一竖向驱动机构的输出端固定安装有旋转驱动机构,所述旋转驱动机构的输出轴上固定有防护托板;所述防护托板的转动轴线竖直,且所述机械夹爪在竖直方向上的投影位于所述防护托板的转动范围内。
2.根据权利要求1所述的防脱落机械抓手,其特征在于:所述第一竖向驱动机构包括第一电机、连接框、第一螺杆、螺纹套管和导向件;所述第一电机与所述连接框均相对于所述安装座固定;所述第一螺杆与所述第一电机的输出轴传动连接,所述螺纹套管的上部旋拧在所述第一螺杆上、下部在穿过开设在所述连接框上的通孔后与所述旋转驱动机构相连接;所述导向件固定在所述螺纹套管上,且所述导向件沿竖直方向相对于所述连接框滑动连接。
3.根据权利要求2所述的防脱落机械抓手,其特征在于:所述连接框呈封闭式构造,所述第一螺杆以及所述导向件均位于所述连接框的内部;所述连接框的上部开设有供所述第一电机的输出轴穿过的轴孔、下部开设有供所述螺纹套管穿过的通孔。
4.根据权利要求3所述的防脱落机械抓手,其特征在于:所述第一电机与所述连接框分别位于所述安装座的顶面和底面;所述安装座上开设有供所述第一电机的输出轴穿过的轴孔。
5.根据权利要求1所述的防脱落机械抓手,其特征在于:所述旋转驱动机构包括第三电机。
6.根据权利要求1所述的防脱落机械抓手,其特征在于:所述防护托板呈水平状布置,且所述防护托板的顶面设置有承接凹槽。
7.根据权利要求1所述的防脱落机械抓手,其特征在于:所述机械夹爪包括基座、伸缩驱动机构、夹板、平行四边形连杆机构和连杆;所述基座固定在所述安装座上,所述伸缩驱动机构竖向布置并固定在所述基座上;所述平行四边形连杆机构有两个并相对地枢转连接在所述基座上;所述平行四边形连杆机构的下端均固定有所述夹板、上端均通过所述连杆与所述伸缩驱动机构的输出端相连接。
8.根据权利要求1-7任一项所述的防脱落机械抓手,其特征在于:还包括机架、滑动座以及第二竖向驱动机构;所述滑动座沿水平方向滑动连接在所述机架上,所述机架上还安装有用于带动所述滑动座滑动的水平驱动机构;所述第二竖向驱动机构固定安装在所述滑动座上,所述安装座固定在所述第二竖向驱动机构的输出端上。
9.根据权利要求8所述的防脱落机械抓手,其特征在于:所述水平驱动机构包括第二电机和第二螺杆,所述第二螺杆呈水平状布置并可转动连接在所述机架上,所述第二电机固定安装在所述机架上,且所述第二电机的输出轴与所述第二螺杆传动连接;其中,所述滑动座上开设有与所述第二螺杆相适配的螺孔,或者所述滑动座上固定有与所述第二螺杆相适配的螺母。
10.根据权利要求8所述的防脱落机械抓手,其特征在于:所述第二竖向驱动机构为电动推杆。
技术总结
本发明公开了一种防脱落机械抓手,属于机械抓取技术领域,包括安装座和机械夹爪,机械夹爪固定在安装座上;安装座上还固定有第一竖向驱动机构,第一竖向驱动机构的输出端固定安装有旋转驱动机构,旋转驱动机构的输出轴上固定有防护托板;防护托板的转动轴线竖直,且机械夹爪在竖直方向上的投影位于防护托板的转动范围内。本发明能够使防护托板从底面一侧对被抓取的物品进行托底,避免物品从机械抓手中脱落后直接掉落在地面上而摔坏的情况发生,确保在物品搬运过程中,物品周向方向上能够得到机械抓手的夹持、下方一侧能够得到防护托板的承托,因此不会发生因颠簸等原因造成从机械抓手上脱落的情况,从而有效地保护物品。
技术研发人员:史梓晗,金斌辉,李维杰,刘宝林
受保护的技术使用者:上海理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!