一种内旋式双舱载物送物机器人的制作方法
本发明涉及机器人,尤其是一种内旋式双舱载物送物机器人。
背景技术:
1、随着智能家居时代的到来,互联网与生活的关系日渐密切,酒店也变得越来越智能,越来越多的服务机器人开始进入酒店行业并扮演着重要角色,不仅能够吸引消费者的眼球,也能让酒店服务变得更加智能和安全。
2、目前市面上的送物机器人款式众多,按存储空间看包括单舱、双舱、多舱各种形式,按开门方式看包括抽屉式、上下滑动式、内开式、外开式等多种形式。
3、现有的单舱送物机器人的开门方式主要以内开式为主,但单舱结构的存储空间有限,且无法满足多个任务同时配送。双舱送物机器人的开门方式以抽屉式或上下滑动式为主,使用便捷性较差且抽屉式还需要占用较大的机器人外部空间;而多舱式送物机器人的开门方式又以外开式为主,开门时占用机器人外部空间较大,影响使用体验。
技术实现思路
1、针对现有技术的不足,本发明提供一种内旋式双舱载物送物机器人。
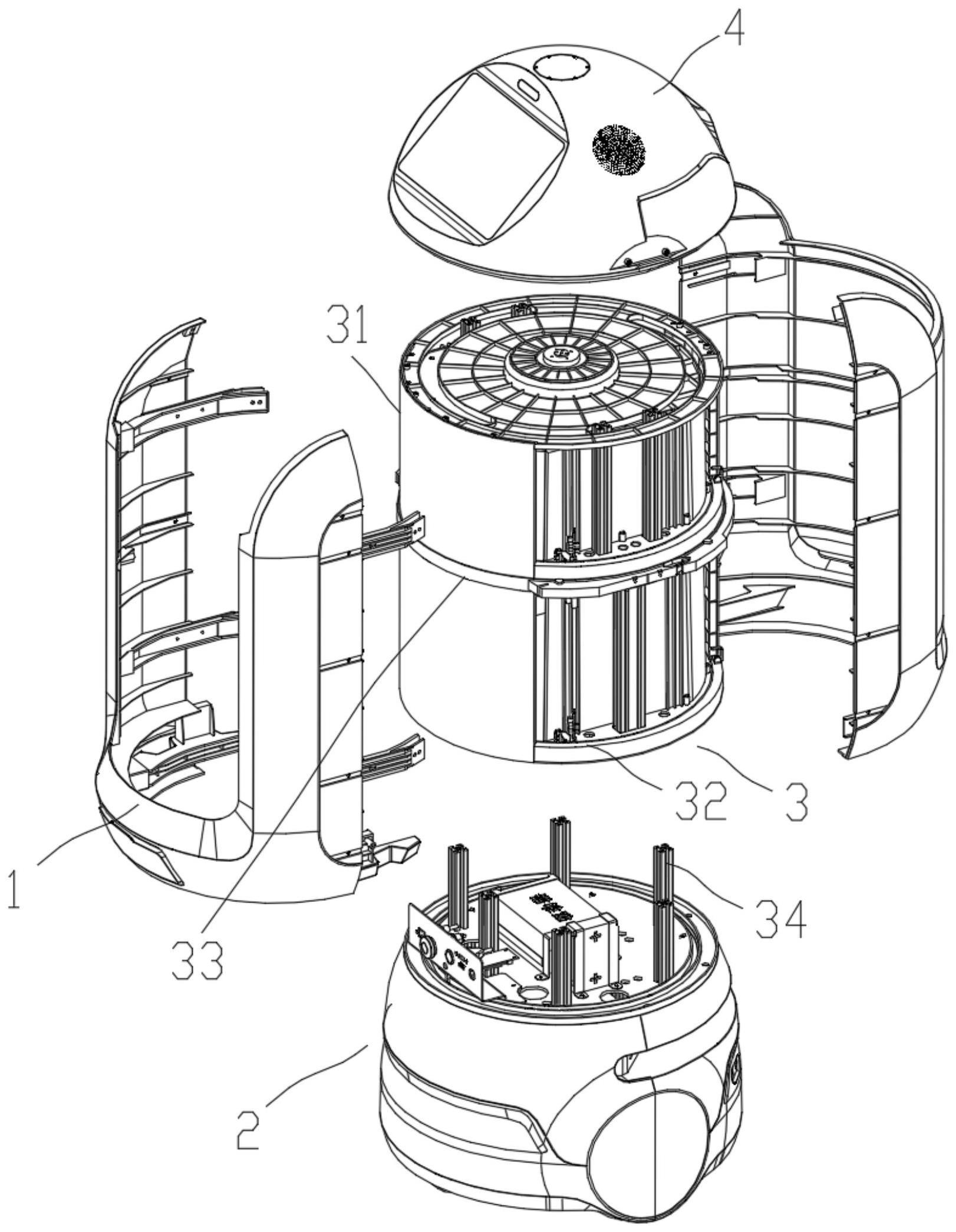
2、本发明的技术方案为:一种内旋式双舱载物送物机器人,包括机器人壳体、底座、旋转式载物仓、机器人头部;所述的底座上端设置有机器人壳体,所述的机器人壳体内设置有旋转式载物仓,所述的机器人壳体上端设置有机器人头部;
3、所述的旋转式载物仓包括结构相同的上舱和下舱;所述的上舱和下舱之间通过中间板连接;所述的下舱通过多个支撑立柱与底座连接;
4、所述的上舱包括上舱舱体、舱体加固板、上舱转动板、转动电机,所述的上舱舱体上端设置有舱体加固板,所述的舱体加固板的中央位置设置有转动电机,所述的转动电机的电机轴通过电机法兰与上舱转动板转动连接,所述的上舱转动板上端的电机法兰上设置有端盖,且所述的转动电机外侧的舱体加固板上设置有多个支撑滚珠;所述的支撑滚珠与上舱转动板抵接;
5、所述的上舱舱体外侧还设置有上舱舱门和支撑板,所述的上舱舱门和支撑板相对设置在环形支撑条上,所述的上舱舱门和支撑板底部之间通过弧形的连接条连接;所述的上舱舱体和支撑板上端与上舱转动板连接,通过所述的上舱转动板带动上舱舱门和支撑板绕上舱舱体转动。
6、作为优选的,所述的底座包括底座壳体,设置在底座壳体内的底盘,所述的底盘上设置有电池,且所述的底盘下端设置有滚轮组件。
7、作为优选的,所述的滚轮组件包括主动轮组件和从动轮组件,且所述的主动轮组件通过pcb板与电池连接。
8、作为优选的,所述的主动轮组件包括两个轮毂电机、主动轮支架,两个主动轮支架对称设置在底盘上,且每个所述的轮毂电机通过固定块设置在相应的主动轮支架上,所述的轮毂电机通过驱动器与pcb板连接。
9、作为优选的,所述的从动轮组件具有2组,每组所述从动轮组件包括两个从动轮,两个所述的从动轮通过相应的从动轮支架对称设置在底盘上,且其中一组的从动轮的直径大于另一组从动轮的直径。
10、作为优选的,所述的上舱舱体的底部外侧设置有多个导向滚轮,多个所述的导向滚轮与连接条内侧壁相配合。
11、作为优选的,所述的支撑板一侧上还设置有第一感应片。
12、作为优选的,所述的连接条一端上还开门感应结构,所述的开门感应结构包括第一安装支架,所述的第一安装支架上设置有开门感应片、第一槽型光电感应器、以及第一行程开关。
13、作为优选的,所述的支撑板上设置有关门感应结构,所述的关门感应结构包括第二安装支架,所述的第二安装支架上设置有关门感应片、第二槽型光电感应器。
14、本发明的有益效果为:
15、1、本发明结构简单,本发明为双舱结构,而且采用旋转式开门,从而减少机器人舱门占用的空间,增加了机器人舱内空间;
16、2、本发明通过上舱转动板带动舱门转动,从而实现开门和关门;另外本发明通过设置双轮毂电机和2组从动轮,从而可以更好的控制机器人行走。
技术特征:
1.一种内旋式双舱载物送物机器人,包括机器人壳体(1)、底座(2)、旋转式载物仓(3)、机器人头部(4);所述的底座(2)上端设置有机器人壳体(1),所述的机器人壳体(1)内设置有旋转式载物仓(3),所述的机器人壳体(1)上端设置有机器人头部(4);
2.根据权利要求1所述的一种内旋式双舱载物送物机器人,其特征在于:所述的转动电机(38)的电机轴向上穿过上舱转动板(37)后与电机法兰和端盖连接。
3.根据权利要求1所述的一种内旋式双舱载物送物机器人,其特征在于:所述的中间板(33)上还设置有多个用于与环形支撑条(43)相配合的支撑滚珠(40)。
4.根据权利要求1所述的一种内旋式双舱载物送物机器人,其特征在于:所述的上舱舱体(35)的底部外侧设置有多个导向滚轮(39),多个所述的导向滚轮(39)与连接条(44)内侧壁相配合。
5.根据权利要求1所述的一种内旋式双舱载物送物机器人,其特征在于:所述的支撑板(42)一侧上还设置有第一感应片(45)。
6.根据权利要求4所述的一种内旋式双舱载物送物机器人,其特征在于:所述的连接条(44)一端上还开门感应结构,所述的开门感应结构包括第一安装支架,所述的第一安装支架上设置有开门感应片(46)、第一槽型光电感应器(47)、以及第一行程开关(48)。
7.根据权利要求5所述的一种内旋式双舱载物送物机器人,其特征在于:所述的支撑板(42)上设置有关门感应结构,所述的关门感应结构包括第二安装支架(49),所述的第二安装支架(49)上设置有关门感应片(51)、第二槽型光电感应器(52)。
8.根据权利要求1所述的一种内旋式双舱载物送物机器人,其特征在于:所述的底座(2)包括底座壳体(21),以及设置在底座壳体(21)内的底盘(22),所述的底盘(22)上设置有电池(23),且所述的底盘(22)下端设置有滚轮组件;所述的滚轮组件包括主动轮组件和从动轮组件,且所述的主动轮组件通过pcb板(24)与电池(23)连接。
9.根据权利要求8所述的一种内旋式双舱载物送物机器人,其特征在于:所述的主动轮组件包括两个轮毂电机(25)、主动轮支架(26),两个主动轮支架(26)对称设置在底盘(22)上,且每个所述的轮毂电机(25)通过固定块设置在相应的主动轮支架(26)上,所述的轮毂电机(25)通过驱动器与pcb板(24)连接。
10.根据权利要求8所述的一种内旋式双舱载物送物机器人,其特征在于:所述的从动轮组件具有2组,每组所述从动轮组件包括两个从动轮(27),两个所述的从动轮(27)通过相应的从动轮支架(28)对称设置在底盘(22)上,且其中一组的从动轮(27)的直径大于另一组从动轮(27)的直径。
技术总结
本发明提供一种内旋式双舱载物送物机器人,包括机器人壳体、底座、旋转式载物仓、机器人头部;底座上端设置有机器人壳体,所述的机器人壳体内设置有旋转式载物仓,机器人壳体上端设置有机器人头部;旋转式载物仓包括结构相同的上舱和下舱;上舱和下舱之间通过中间板连接;本发明结构简单,本发明为双舱结构,而且采用旋转式开门,从而减少机器人舱门占用的空间,增加了机器人舱内空间;本发明通过上舱转动板带动舱门转动,从而实现开门和关门;另外本发明通过设置双轮毂电机和2组从动轮,从而可以更好的控制机器人行走。
技术研发人员:苏登,唐华全,刘浩
受保护的技术使用者:广州市申迪计算机系统有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!