一种结构可变球体月面勘察机器人的制作方法
本发明涉及一种结构可变球体月面勘察机器人,可适用于月面非结构化环境下的勘察机器人总体方案设计,属地外天体表面巡视机器人设计领域。
背景技术:
1、智能化、自主化、低成本、高可靠性的勘查机器人设计方案是应对月面非结构化环境,提高探测效率和探测范围的关键手段。现有的地外天体表面勘察机器人多为轮系平台机器人。轮系平台机器人通常体积重量大、成本极高、地形环境约束强、功能固化,不适用于面向低成本、复杂地形环境下的灵活探测任务场景。
2、因此,更深层次的月球探测任务对具有性能优良的机器人系统有迫切需求。相较于传统移动机器人,球体机器人运动更为灵活,且不存在侧翻问题,在平台移动能力、可靠性、安全性方面存在巨大优势,但在复杂非结构化月面环境巡视勘察时,球体机器人同样存在传统机器人易卡陷、易滑落、载荷易受损等缺陷。
技术实现思路
1、本发明解决的技术问题是:为提高球体机器人在月面探测的移动能力和地形通过能力,需克服球体机器人的固有缺陷。因此,本发明提出了一种结构可变球体月面勘察机器人设计方案,可实现复杂地形的通过性和越障能力。此外,在球体机器人平台上,设计了多场景下运动模式的自主切换方案和可配置的工作模式保证了非结构化月面地形条件下巡视勘察能力,通过多方案统筹设计、智能化设计实现了低成本条件下自主任务规划和管理能力。
2、本发明的技术解决方案是:
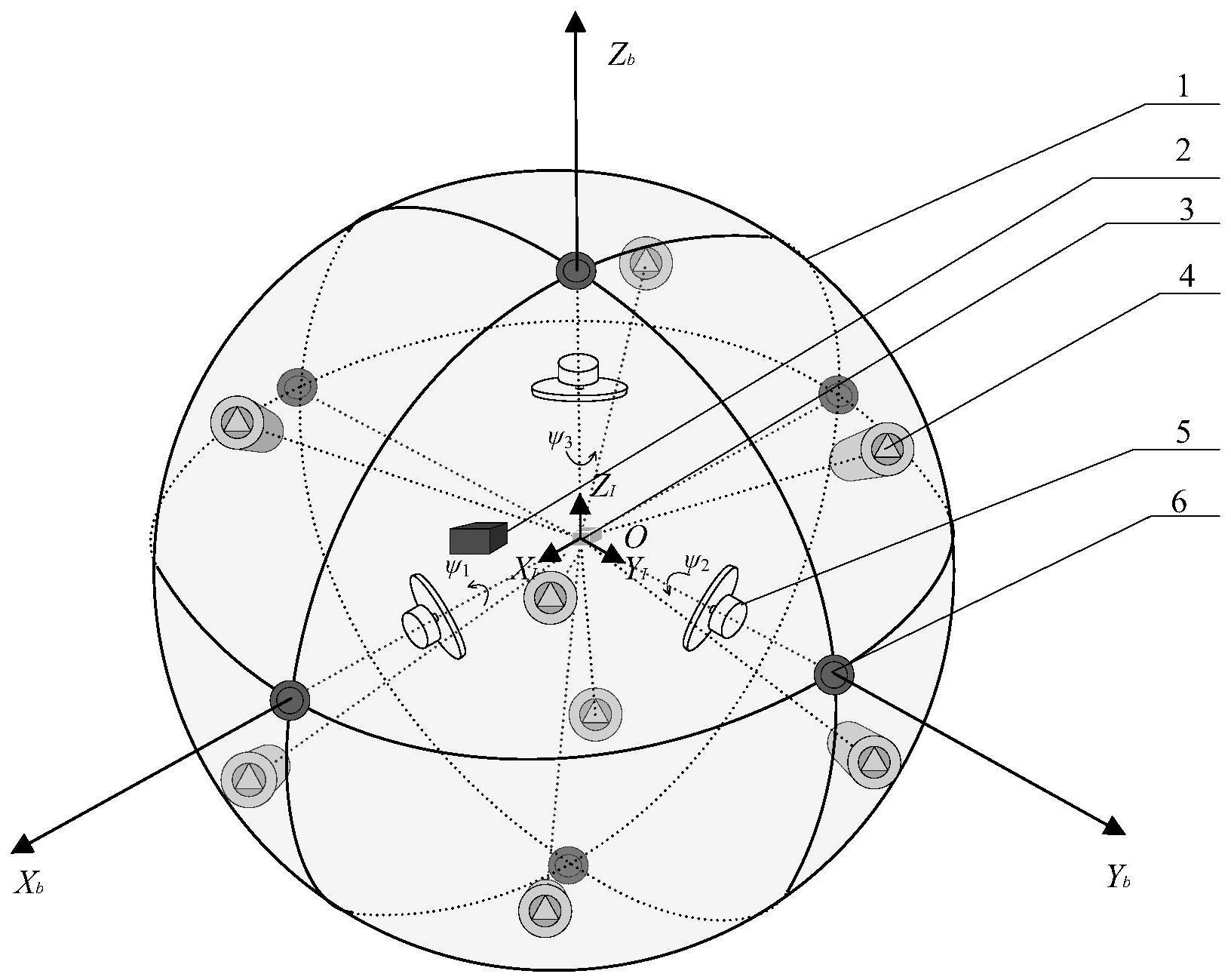
3、一种结构可变球体月面勘察机器人,包括:球体结构壳体、导航制导控制计算机模块、微型惯性测量单元、突棘机构、动量轮和载荷相机;
4、导航制导控制计算机模块、微型惯性测量单元、突棘机构、动量轮、载荷相机均安装于球体结构壳体内部;
5、微型惯性测量单元用于获取球体结构壳体的加速度和角速度;
6、动量轮用于提供空间任意方向的驱动力矩;
7、多个载荷相机均布,分别用于获取球体结构壳体外部附近的图像信息;
8、多个突棘机构均布,每个突棘机构能够独立的伸出球体结构壳体表面;
9、导航制导控制计算机模块根据球体结构壳体的加速度和角速度和图像信息,对动量轮和突棘机构进行控制从而调整球体结构壳体的运动状态。
10、优选地,所述突棘机构包括:机壳限位装置、外环结构、内环结构、机构控制器和伸缩机构;
11、内环结构、外环结构和机壳限位装置由内至外依次套装;
12、外环结构和内环结构能够沿轴线相对机壳限位装置滑动;
13、机壳限位装置固定连接球体结构壳体;
14、机壳限位装置、外环结构和内环结构的外壁面和球体结构壳体的外壁面共形;
15、机构控制器通过控制伸缩机构驱动外环结构、内环结构的独立收缩与伸出。
16、优选地,机壳限位装置内壁设置有限位结构,用于限制外环结构的收缩位置;
17、外环结构内壁设置有限位结构,用于限制内环结构的收缩位置。
18、优选地,内环结构内部能够搭载采样装置或资源探测载荷。
19、优选地,突棘机构的数量为8个。
20、优选地,动量轮的配置数量为三套,三套动量轮的转轴分别与本体坐标系坐标轴xb、yb、zb正向重合,且正向转动方向与本体坐标系坐标轴xb、yb、zb正向一致;
21、本体坐标系的原点位于球体结构壳体的几何中心,本体坐标系的三轴正交构成右手直角坐标系。
22、优选地,载荷相机的使用数量为6个,各相机光轴出光方向分别沿本体坐标系坐标轴xb、yb、zb的正向和负向指向球体结构壳体外侧。
23、优选地:
24、当突棘机构处于收缩状态时,动量轮驱动球体结构壳体进行滚转运动;
25、当突棘机构处于伸出状态时,改变球体结构壳体的运动方向;
26、突棘机构和动量轮配合使用,用于实现球体结构壳体的跳跃运动。
27、优选地,三轴微型惯性测量单元包括三正交配置的光纤陀螺与加速度计,敏感轴方向与本体坐标系坐标轴xb、yb、zb正向重合,用于获取球体结构壳体的加速度和角速度。
28、优选地,球体结构壳体的外表面设计有锥状凸起,锥状凸起均匀分布,锥状凸起采用纤维增强复合材料。
29、本发明与现有技术相比的优点在于:
30、1)本发明提出了一种结构可变球体月面勘察机器人设计方案,可提高机器人移动、越障、复杂地形下脱困能力,以适应复杂月面地形环境下的灵活探测任务。其研究方法可以应用于其他地外天体表面勘测机器人的设计,具有广泛应用场景。
31、2)本发明基于可变结构球体机器人进行了多运动模式设计,通过包括球体滚动、突棘运动、跳跃模式等,运动模式可根据地形环境进行切换,从而满足对非结构化地形环境性的移动需求。
32、3)本发明对能源、热控、转移方案采用统筹设计,可有效降低机器人的制造成本,并支持扩展在如下应用场景下:信标导航及监视系统建立、基站建立、远端协同采样系统等。具有广阔的应用前途和技术发展连续性。
技术特征:
1.一种结构可变球体月面勘察机器人,其特征在于,包括:球体结构壳体(1)、导航制导控制计算机模块(2)、微型惯性测量单元(3)、突棘机构(4)、动量轮(5)和载荷相机(6);
2.根据权利要求1所述的一种结构可变球体月面勘察机器人,其特征在于,所述突棘机构(4)包括:机壳限位装置(7)、外环结构(8)、内环结构(9)、机构控制器(10)和伸缩机构(11);
3.根据权利要求2所述的一种结构可变球体月面勘察机器人,其特征在于,机壳限位装置(7)内壁设置有限位结构,用于限制外环结构(8)的收缩位置;
4.根据权利要求2所述的一种结构可变球体月面勘察机器人,其特征在于,内环结构(9)内部能够搭载采样装置或资源探测载荷。
5.根据权利要求2所述的一种结构可变球体月面勘察机器人,其特征在于,突棘机构(4)的数量为8个。
6.根据权利要求2~5任意之一所述的一种结构可变球体月面勘察机器人,其特征在于,动量轮(5)的配置数量为三套,三套动量轮(5)的转轴分别与本体坐标系坐标轴xb、yb、zb正向重合,且正向转动方向与本体坐标系坐标轴xb、yb、zb正向一致;
7.根据权利要求6所述的一种结构可变球体月面勘察机器人,其特征在于,载荷相机的使用数量为6个,各相机光轴出光方向分别沿本体坐标系坐标轴xb、yb、zb的正向和负向,指向球体结构壳体(1)外侧。
8.根据权利要求7所述的一种结构可变球体月面勘察机器人,其特征在于:
9.根据权利要求2~5任意之一所述的一种结构可变球体月面勘察机器人,其特征在于,三轴微型惯性测量单元(3)包括三正交配置的光纤陀螺与加速度计,敏感轴方向与本体坐标系坐标轴xb、yb、zb正向重合,用于获取球体结构壳体(1)的加速度和角速度。
10.根据权利要求9所述的一种结构可变球体月面勘察机器人,其特征在于,球体结构壳体(1)的外表面设计有锥状凸起,锥状凸起均匀分布,锥状凸起采用纤维增强复合材料。
技术总结
一种结构可变球体月面勘察机器人,包括:球体结构壳体、导航制导控制计算机模块、微型惯性测量单元、突棘机构、动量轮和载荷相机;微型惯性测量单元用于获取球体结构壳体的加速度和角速度;动量轮用于提供空间任意方向的驱动力矩;多个载荷相机均布,分别用于获取球体结构壳体外部附近的图像信息;多个突棘机构均布,每个突棘机构能够独立的伸出球体结构壳体表面;导航制导控制计算机模块根据球体结构壳体的加速度和角速度和图像信息,对动量轮和突棘机构进行控制从而调整球体结构壳体的运动状态。本发明球型机器人具有越障能力强、结构紧凑、环境适应性强、可扩展性强等优点。
技术研发人员:王华强,刘秋红,王磊,李志平,王泽国,孙帅
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!