一种轨道机器人联动悬挂驱动装置的制作方法
本发明涉及一种自动化设备领域,特别涉及一种轨道机器人联动悬挂驱动装置。
背景技术:
1、繁琐环境中,利用机器人代替人工完成巡检任务,降低人力成本,减少安全事故的危害,可以24小时全天候实现巡检功能。
2、现有的轨道机器人驱动悬挂装置通常以圆柱形滚轮作为轨道机器人移动的驱动端,由于轨道机器人上通常会同时设有多个滚轮,圆柱形滚轮容易因加工误差使得其中某个滚轮或几个滚轮不能与轨道贴紧,影响轨道机器人的运动,直接导致机器人停止位置精度偏差大,驱动轮磨损大,后期维护量增大。
技术实现思路
1、本发明的主要目的在于提供了一种轨道机器人联动悬挂驱动装置。
2、为实现上述目的,本发明采取的技术方案为:
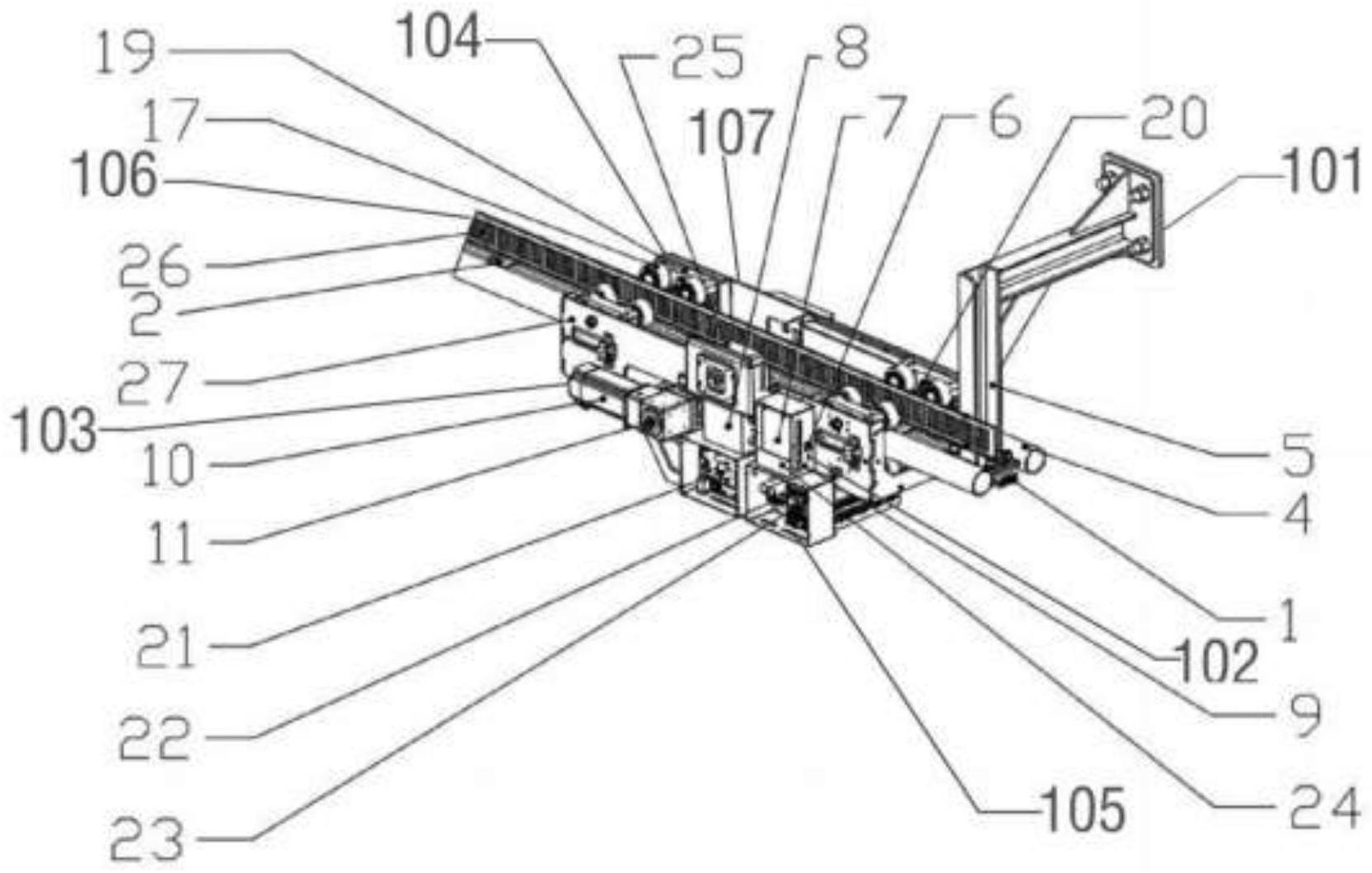
3、一种轨道机器人联动悬挂驱动装置,包括复合圆形轨道模块,复合通讯模块,顶升悬挂驱动模块,抱闸式辅助轮,控制模块,定位模块和机架,该机架上固定安装有复合通讯模块,顶升悬挂驱动模块,抱闸式辅助轮和控制模块,该定位模块包括扫码定位器和条码定位纸,该扫码定位器固定安装在机架上,该条码定位纸固定安装在复合圆形轨道模块上,该复合圆形轨道模块与顶升悬挂驱动模块和抱闸式辅助轮滑动连接;
4、所述复合圆形轨道模块包括三合一供电载波滑线,滑线固定器,多轴碳刷,平板圆形轨道和轨道支架;
5、所述复合通讯模块包括电力载波通讯器,无线wi f i通讯器,电力隔离器和网络融合器;
6、所述顶升悬挂驱动模块包括驱动电机,减速机,驱动轮,联动轴,第一连杆,阻尼器和减震器;
7、所述抱闸式辅助轮包括大包胶轮,小包胶轮,桥式连杆,连轴和减震器;
8、所述控制模块包含中央处理器,电源管理器,驱动管理器和通讯管理器。
9、进一步的,所述多轴碳刷固定安装在机架上,该多轴碳刷与三合一供电载波滑线滑动连接,该三合一供电载波滑线通过滑线固定器固定安装在平板圆形轨道上,该平板圆形轨道固定安装在轨道支架上。
10、进一步的,所述电力隔离器和电力载波通讯器组成有线网络通讯系统,所述无线wi f i通讯器和电力隔离器组成无线网络通讯系统,所述有线网络通讯系统和无线网络通讯系统以及网络融合器共同组成机器人复合通讯系统。
11、进一步的,所述驱动电机固定连接有减速机,该减速机固定连接有联动轴,该联动轴上固定套装有两组用于传动的驱动轮,该联动轴上还固定安装有旋转轴承,该旋转轴承外环面固定套装有第一连杆,该第一连杆固定连接有阻尼器,该阻尼器上滑动套装有减震器。
12、进一步的,所述抱闸式辅助轮设有四组辅助轮,分别包含四个大包胶轮和两个小包胶轮,该大包胶轮和两个小包胶轮均固定安装在桥式连杆上,并通过连轴固定连接,该大包胶轮分别与平板圆形轨道的上下端面滑动贴合连接,该小包胶轮与平板圆形轨道的侧端面滑动贴合连接,与平板圆形轨道下端面连接的两个大包胶轮之间固定设有减震器。
13、更进一步的,所述机架包含主梁,异型连接件,防撞板和横梁,该主梁两头固定安装有防撞板,横梁分布安装在主梁内部,主梁和横梁接触处采用榫卯结构连接,并使用异型连接件固定。
14、与现有技术相比,本发明的有益效果为:
15、本发明主要用于机器人上的驱动和高精度定位的工作,结合减震器的挤压一起做联动浮动根据平板圆形轨道的不同坡度进行实时调节,当驱动轮遇到轨道安装不水平时,驱动轮可以上下移动,由于顶升悬挂装置的恢复力的作用使得驱动轮能紧贴轨道面,避免出现作为驱动轮的驱动轮架空;
16、本发明的机器人悬挂轮克服了轨道水平偏移高低不平的偏移,以及克服了作为驱动轮的车轮出现架空现象,能够实现精确驱动,高精度停止。当机器人高速运行时定位模块中的定位器实时扫描轨道上的条码,使机器人实时精确掌控位置信息,使其走得稳,停得准;
17、同时闸式辅助轮其小包胶轮实时贴合一字圆形轨道背面用来提供挤压力增大驱动轮的跳动后的压力贴合,从而提高抗震性。
技术特征:
1.一种轨道机器人联动悬挂驱动装置,其特征在于:包括复合圆形轨道模块(101),复合通讯模块(102),顶升悬挂驱动模块(103),抱闸式辅助轮(104),控制模块(105),定位模块(106)和机架(107),该机架(107)上固定安装有复合通讯模块(102),顶升悬挂驱动模块(103),抱闸式辅助轮(104)和控制模块(105),该定位模块(106)包括扫码定位器(25)和条码定位纸(26),该扫码定位器(25)固定安装在机架(107)上,该条码定位纸(26)固定安装在复合圆形轨道模块(101)上,该复合圆形轨道模块(101)与顶升悬挂驱动模块(103)和抱闸式辅助轮(104)滑动连接;
2.如权利要求1所述的一种轨道机器人联动悬挂驱动装置,其特征在于:所述多轴碳刷(3)固定安装在机架(107)上,该多轴碳刷(3)与三合一供电载波滑线(1)滑动连接,该三合一供电载波滑线(1)通过滑线固定器(2)固定安装在平板圆形轨道(4)上,该平板圆形轨道(4)固定安装在轨道支架(5)上。
3.如权利要求1所述的一种轨道机器人联动悬挂驱动装置,其特征在于,所述电力隔离器(8)和电力载波通讯器(6)组成有线网络通讯系统,所述无线wifi通讯器(7)和电力隔离器(8)组成无线网络通讯系统,所述有线网络通讯系统和无线网络通讯系统以及网络融合器(9)共同组成机器人复合通讯系统。
4.如权利要求1所述的一种轨道机器人联动悬挂驱动装置,其特征在于,所述驱动电机(10)固定连接有减速机(11),该减速机(11)固定连接有联动轴(13),该联动轴(13)上固定套装有两组用于传动的驱动轮(12),该联动轴(13)上还固定安装有旋转轴承,该旋转轴承外环面固定套装有第一连杆(14),该第一连杆(14)固定连接有阻尼器(15),该阻尼器(15)上滑动套装有减震器(16)。
5.如权利要求1所述的一种轨道机器人联动悬挂驱动装置,其特征在于,所述抱闸式辅助轮(104)设有四组辅助轮,分别包含四个大包胶轮(17)和两个小包胶轮(18),该大包胶轮(17)和两个小包胶轮(18)均固定安装在桥式连杆(19)上,并通过连轴(20)固定连接,该大包胶轮(17)分别与平板圆形轨道(4)的上下端面滑动贴合连接,该小包胶轮(18)与平板圆形轨道(4)的侧端面滑动贴合连接,与平板圆形轨道(4)下端面连接的两个大包胶轮(17)之间固定设有减震器(16)。
6.如权利要求1所述的一种轨道机器人联动悬挂驱动装置,其特征在于,所述机架(107)包含主梁(27),异型连接件(28),防撞板(29)和横梁(30),该主梁(27)两头固定安装有防撞板(29),横梁(30)分布安装在主梁(27)内部,主梁(27)和横梁(30)接触处采用榫卯结构连接,并使用异型连接件(28)固定。
技术总结
本发明公开了一种轨道机器人联动悬挂驱动装置,包括复合圆形轨道模块,复合通讯模块,顶升悬挂驱动模块,抱闸式辅助轮,控制模块,定位模块和机架,该机架上固定安装有复合通讯模块,顶升悬挂驱动模块,抱闸式辅助轮和控制模块,该定位模块包括扫码定位器和条码定位纸,该扫码定位器固定安装在机架上,该条码定位纸固定安装在复合圆形轨道模块上,该复合圆形轨道模块与顶升悬挂驱动模块和抱闸式辅助轮滑动连接,本发明的机器人悬挂轮克服了轨道水平偏移高低不平的偏移,以及克服了作为驱动轮的车轮出现架空现象,能够实现精确驱动,高精度停止。
技术研发人员:请求不公布姓名
受保护的技术使用者:智慧起源机器人(苏州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!