一种金属管道质量管外检测机器人
本发明涉及管道质量检测领域,具体的是一种机器人。
背景技术:
1、随着人们日常生活的需要,大量的管道系统被运用在长距离油气运输中,而近年来管道泄漏造成的环境问题和安全问题又屡见不鲜,这对管道运输的安全提出了更高要求,因此,对管道质量的检测显得尤为重要。人工检测消耗人力物力成本大,而且还存在一定的安全隐患。
2、市面上现有的管外探伤机器人,适配的管道都为管径较大的管道,且实施成本高。
技术实现思路
1、本发明的目的在于提供了一种结合图像与电磁手段,通过应用仿生节肢动物结构,可以自适应不同管径的金属管外抱管质量检测工作,实现低成本高适应度精确度管道检测的金属管道质量管外检测机器人。
2、本发明解决上述技术问题采用的技术方案为:
3、一种金属管道质量管外检测机器人,其特征是:包括主体模块、关节模块、主动万向轮模块;
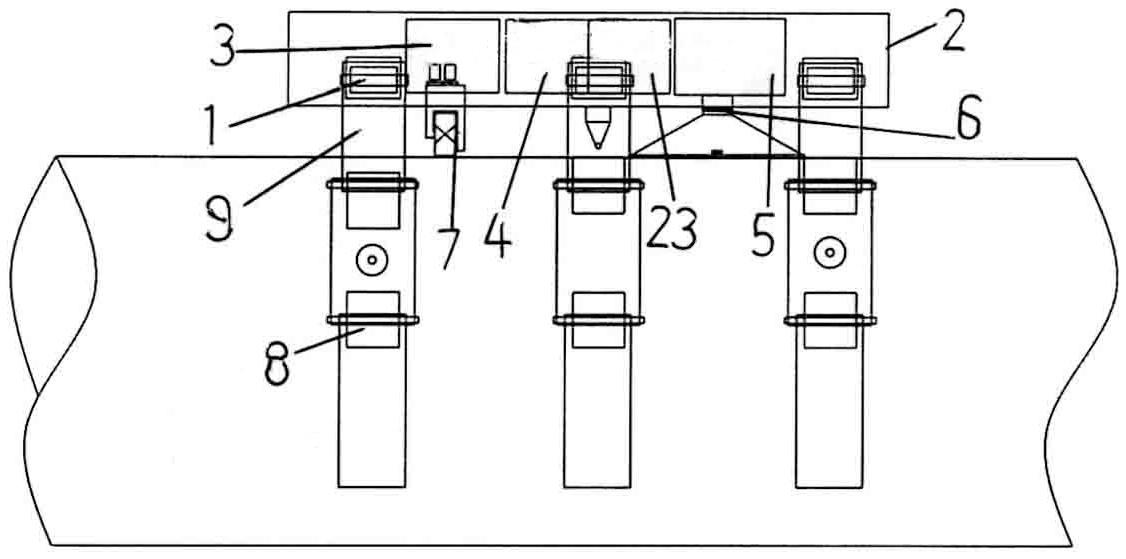
4、所述主体模块包括主体外壳,所述主体外壳内部安放有运动控制模块用于控制驱动关节力矩电机和主动万向轮,所述主体外壳内部安放有电源与信号激励源模块、信号放大与后处理模块、图像处理模块,所述图像处理模块下方安装有图像采集装置,所述信号放大与后处理模块下方安装有磁通量传感探头,所述主体外壳下方安放有主动万向轮模块;
5、所述关节模块包括关节轴,所述关节轴与关节力矩电机同轴安放,用于驱动关节产生扭矩抱紧管道;
6、所述主动万向轮模块包括:齿轮箱,所述齿轮箱与回转轴固定,转动电机驱动第一转动齿轮、所述第一转动齿轮带动第二转动齿轮、所述第二转动齿轮带动回转轴做转动,所述齿轮箱边沿上固定有激光反光镜,所述激光反光镜用于反射激光探测仪发射的信号;驱动电机带动传动锥齿轮,所述传动锥齿轮带动与另一个锥齿轮相连的第一驱动传动直齿轮、所述第一驱动传动直齿轮带动第二驱动传动直齿轮、所述第二驱动传动直齿轮带动轮轴、所述轮轴带动主动轮完成驱动;
7、所述关节轴连接与其相连的前后两个关节构件;关节构件上安装4个弹性电刷激励信号发射探头,对角的2个为一组,在管道上的投影连线形成正交,所述主体模块的磁通量传感探头位于交点;工作时,信号发生装置生成一组正弦波,改波形分为两路,一路直接通过斩波以高频脉冲的形式输出到一对发射极,另一路先对原始波形进行180度相位的移相,使其滞后半个周期,再以同样的方式输出到另一对发射极;此时,在管壁中形成持续变化的电流场,根据上述操作,在磁通量传感探头正下方,该电流场的矢量在宏观上等价于匀速旋转,经过传感探头采样、后处理模块放大与滤波测得磁通量,结合运动控制模块传入的位姿信息,对当前点位在一个正弦周期内的磁感分布进行重建,得到直观数据供分析:当存在与电流场相交的缺陷时,电流流至缺陷处时发生偏转,电流密度下降,磁场发生改变;当电流场与缺陷正交时,变化达到极值,据此实现检测并对缺陷定位定性;
8、运动控制部分根据各驱动轮上的绝对值编码器对行进中的位姿情况进行实时反馈闭环控制,并发送实时位姿信息给信号放大与后处理模块,信号放大与后处理模块据此得知当前磁通量传感器所测量的点位;
9、图像识别模块在机器人每次行进前都进行图片拍摄并进行图像识别,当检测到法兰盘等无法通过的情况,机器人回正以节约电量,并发送信号到后台等待人工处理;当检测到影响万向轮行进但可以通过的低矮凹凸情况,在通过该位置时通过控制机器人旋转使万向轮走行其他位置;当检测到异常外观(破损、裂纹、锈蚀等),视情况存储于本地或上传图片,无异常则正常行进。
10、所述激光反光镜每隔90°安装一个,当激光探测仪接收到反射激光信号时,说明所述齿轮箱回转90°,完成一个周期的方向切换,即实现万向轮一次整体转向。
11、所述关节构件,三节的长度从连接所述主体外壳到末端连接从动万向轮的长度分别为540mm、600mm、640mm,每两节所述关节构件之间通过所述关节轴和所述关节力矩电机组合,通过控制所述关节力矩电机抱紧管壁。
12、所述主动万向轮,完成转向后,驱动电机控制主动万向轮向前驱动,此时所述从动万向轮跟随所述主动万向轮的运动进行调整。
13、进一步地,当存在与电流场相交的缺陷时,电流流至缺陷处时发生偏转,电流密度下降,磁场分布发生改变。
14、当电流场与缺陷正交时,磁场分布变化达到极值,实现对缺陷的检测并定位定性。
15、所述图像采集装置对管道表面情况在可见光范围进行检测,对可见缺陷进行识别,同时对所述运动控制模块的决策提供信息。
16、与现有技术相比,本发明专利的有益效果为:
17、(1)一种金属管道管外质量检测机器人,通过设计了一种新型的主动万向轮装置,可以控制所述金属管道管外质量检测机器人在垂直于管道轴线方向以及沿轴线方向两个方向的方向切换以及行进,通过关节处的力矩电机抱紧管壁,通过主动万向轮与从动万向轮一并控制实现机器人的运动。
18、(2)一种金属管道管外质量检测机器人,通过与所述仿生结构相结合,布置弹性电刷激励信号发射探头、磁通量传感探头与图像采集装置,实现运用电磁检测手段与可见光检测手段,实现对内部隐藏缺陷、表面可见缺陷的检测。
技术特征:
1.一种金属管道质量管外检测机器人,其特征是:包括主体模块、关节模块、主动万向轮模块;
2.根据权利要求1所述的一种金属管道质量管外检测机器人,其特征是:所述激光反光镜(22)每隔90°安装一个,当激光探测仪(21)接收到反射激光信号时,说明所述齿轮箱(10)回转90°,完成一个周期的方向切换,即实现万向轮一次整体转向。
3.根据权利要求1所述的一种金属管道质量管外检测机器人,其特征是:所述关节构件(9),三节的长度从连接所述主体外壳(2)到末端连接从动万向轮(24)的长度分别为540mm、600mm、640mm,每两节所述关节构件(9)之间通过所述关节轴(1)和所述关节力矩电机(8)组合,通过控制所述关节力矩电机(8)抱紧管壁。
4.根据权利要求1所述的一种金属管道质量管外检测机器人,其特征是:所述主动轮(20),完成转向后,驱动电机(14)控制主动轮(20)向前驱动,此时所述从动万向轮跟随所述主动轮(20)的运动进行调整。
5.根据权利要求1所述的一种金属管道质量管外检测机器人,其特征是:进一步地,当存在与电流场相交的缺陷时,电流流至缺陷处时发生偏转,电流密度下降,磁场分布发生改变。
6.根据权利要求1所述的一种金属管道质量管外检测机器人,其特征是:当电流场与缺陷正交时,磁场分布变化达到极值,实现对缺陷的检测并定位定性。
7.根据权利要求1所述的一种金属管道质量管外检测机器人,其特征是:所述图像采集装置对管道表面情况在可见光范围进行检测,对可见缺陷进行识别,同时对所述运动控制模块的决策提供信息。
技术总结
本发明公开了一种金属管道质量管外检测机器人,包括主体模块、关节模块、主动万向轮模块;主体模块包括主体外壳,所述主体外壳内部安放有运动控制模块、电源与信号激励源模块、信号放大与后处理模块、图像处理模块,下方安装有图像采集装置、磁通量传感探头和主动万向轮;关节模块的关节轴与关节力矩电机同轴安放,驱动关节产生扭矩抱紧管道,其中在4个关节臂上安装有弹性电刷激励信号发射探头;主动万向轮通过齿轮传动和激光反射监测技术完成驱动和转向。本发明通过采用仿生结构,可以对中小管径的金属管道进行精密检测以及数据反馈,具有较强的实用意义。
技术研发人员:高义,李相鄂,吴荣轩,茅景盛,宫逸文
受保护的技术使用者:武汉科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!