一种三轴机器人的制作方法
本发明涉及机器人,特别是一种三轴机器人。
背景技术:
1、现有三轴机器人结构主要由三个三轴机器人或单轴运动模组直接组装在一起的正交三轴结构,结构不紧凑,空间占用大。
技术实现思路
1、本发明的目的是提供一种三轴机器人,以解决现有技术中的技术问题。
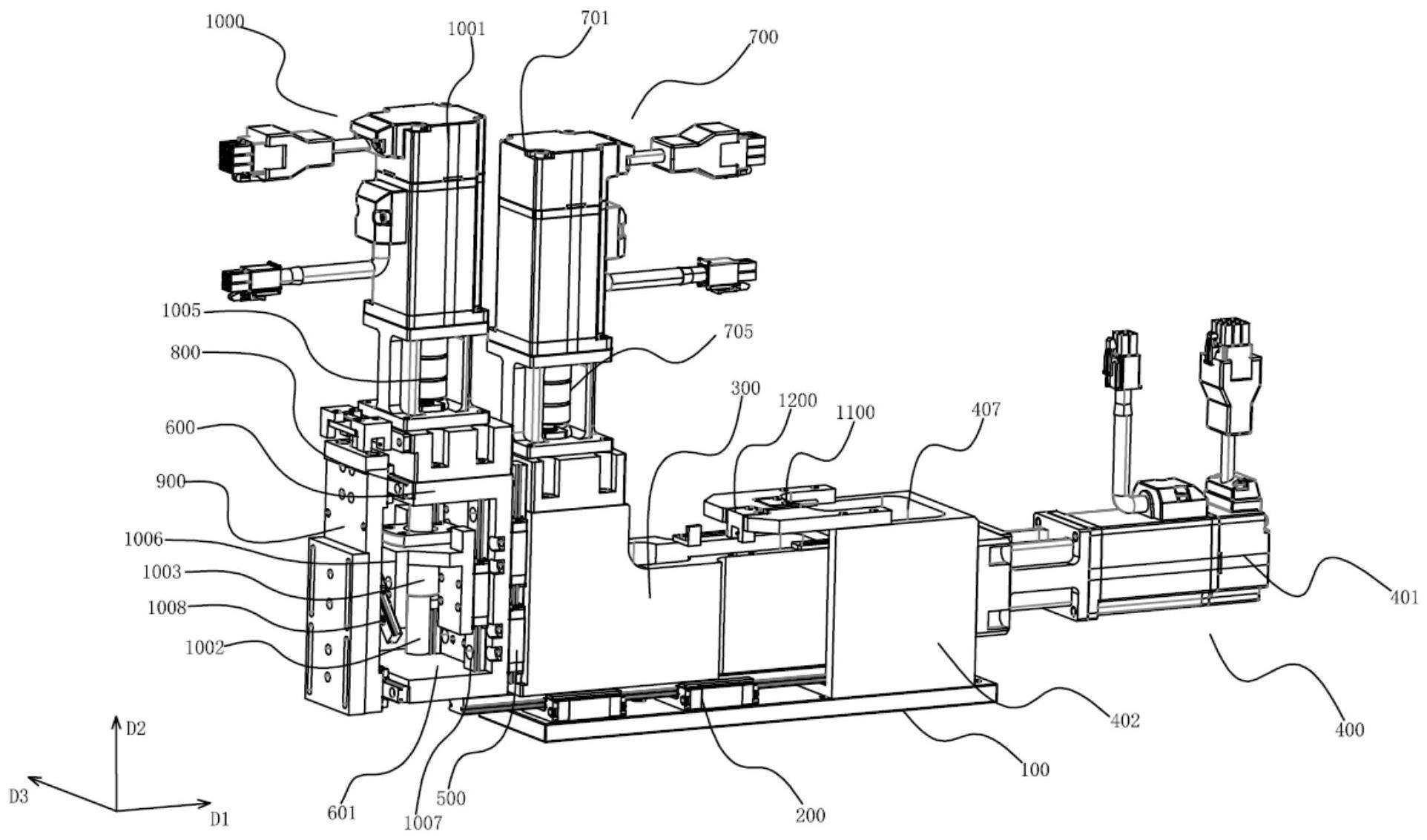
2、本发明提供了一种三轴机器人,包括:
3、基板;
4、第一导向单元,所述第一导向单元设于所述基板上,所述第一导向单元沿第一方向延伸;
5、第一滑座,所述第一滑座与所述第一导向单元连接以形成导向配合;
6、第一驱动件,所述第一驱动件设于所述基板上,所述第一驱动件的输出端与所述第一滑座连接,以驱动所述第一滑座沿所述第一方向移动;
7、第二导向单元,所述第二导向单元设于所述第一滑座上,所述第二导向单元沿第二方向延伸;
8、第二滑座,所述第二滑座与所述第二导向单元连接以形成导向配合;
9、第二驱动件,所述第二驱动件设于所述第一滑座上,所述第二驱动件的输出端与所述第二滑座连接,以驱动所述第二滑座沿所述第二方向移动;
10、第三导向单元,所述第三导向单元设于所述第二滑座上,所述第三导向单元沿第三方向延伸,所述第一方向、所述第二方向与所述第三方向均两两垂直相交;
11、第三滑座,所述第三滑座与所述第三导向单元连接以形成导向配合;
12、第三驱动件,所述第三驱动件设于所述第二滑座上,所述第三驱动件的输出端与所述第三滑座连接,以驱动所述第三滑座沿所述第三方向移动。
13、如上所述的一种三轴机器人,其中,优选的是,所述第一驱动件包括第一驱动电机、第一固定座、第一驱动丝杆、第一丝杆螺母、第一轴承座以及第一联轴器,所述第一固定座设于所述基板上,所述第一驱动电机固定于所述第一固定座上,所述第一驱动电机的输出轴通过所述第一联轴器与所述第一驱动丝杆连接,所述第一驱动丝杆可转动的支撑于所述第一轴承座上,所述第一丝杆螺母螺纹配合于所述第一驱动丝杆上,所述第一滑座与所述第一丝杆螺母固定连接。
14、如上所述的一种三轴机器人,其中,优选的是,所述第一固定座内设有第一容纳腔,所述第一容纳腔于所述第一固定座的第一侧侧壁上设有第一敞口,至少部分所述第一滑座经由所述第一敞口延伸进所述第一容纳腔内,所述第一容纳腔于所述第一固定座的第二侧侧壁上设有第一通过孔,所述第一轴承座穿设于所述第一通过孔内,所述第一驱动电机固定于所述第二侧侧壁的外壁面上。
15、如上所述的一种三轴机器人,其中,优选的是,所述第二驱动件包括第二驱动电机、第二驱动丝杆、第二丝杆螺母、第二轴承座以及第二联轴器,所述第二驱动电机固定于所述第一滑座上,所述第二驱动电机的输出轴通过所述第二联轴器与所述第二驱动丝杆连接,所述第二驱动丝杆可转动的支撑于所述第二轴承座上,所述第二丝杆螺母螺纹配合于所述第二驱动丝杆上,所述第二滑座与所述第二丝杆螺母固定连接。
16、如上所述的一种三轴机器人,其中,优选的是,所述第一滑座内设有第二容纳腔,所述第二驱动电机固定于所述第一滑座的顶部,所述第二驱动丝杆以及所述第二丝杆螺母均收容于所述第二容纳腔内,所述第二容纳腔的第一侧侧壁设有第二敞口,所述第二导向单元设于所述第二容纳腔的第一侧侧壁的外壁面上,所述第二丝杆螺母上设有连接块,所述连接块穿过所述第二敞口后与所述第三滑座连接,所述第二容纳腔的第二侧侧壁设有第二通过孔,所述第一丝杆螺母固定于所述第二通过孔内。
17、如上所述的一种三轴机器人,其中,优选的是,所述第三驱动件包括设于所述第二滑座上的第三驱动电机、第三驱动丝杆、第三丝杆螺母、第三轴承座以及第三联轴器,所述第三驱动电机的输出轴通过所述第三联轴器与所述第三驱动丝杆连接,所述第三驱动丝杆可转动的支撑于所述第三轴承座上,所述第三丝杆螺母螺纹配合于所述第三驱动丝杆上,所述第三滑座直接或间接与所述第三丝杆螺母连接。
18、如上所述的一种三轴机器人,其中,优选的是,所述第三驱动电机固定于所述第二滑座的顶部,所述第三驱动电机的输出轴沿所述第二方向延伸,所述第三丝杆螺母上固定有转接块,所述第二滑座上设有第四导向单元、所述第三滑座上设有第五导向单元,所述第四导向单元与所述第五导向单元分别与所述转接块连接,所述第四导向单元沿所述第二方向延伸,所述第五导向单元沿第四方向延伸,所述第四方向与所述第三方向形成预设夹角。
19、如上所述的一种三轴机器人,其中,优选的是,所述第二滑座内设有第三容纳腔,所述第三驱动丝杆、所述第三丝杆螺母、所述转接块以及所述第四导向单元均收容于所述第三容纳腔内。
20、如上所述的一种三轴机器人,其中,优选的是,所述第一导向单元、所述第二导向单元、所述第三导向单元、所述第四导向单元以及所述第五导向单元为交叉导轨副或直线导轨副。
21、如上所述的一种三轴机器人,其中,优选的是,所述第一滑座、所述第二滑座以及所述第三滑座的移动路径的起始端均设有回零开关;所述第一滑座、所述第二滑座以及所述第三滑座的移动路径的尾端均设有限位开关。
22、与现有技术相比,本发明的第一导向单元以及第一驱动件设于基板上、第二导向单元以及第二驱动件设于第一滑座上、第三导向单元以及第三驱动件设于第二滑座上,从而使得三轴机器人整体结构紧凑且刚性较高,空间占用较小。
技术特征:
1.一种三轴机器人,其特征在于,包括:
2.根据权利要求1所述的三轴机器人,其特征在于:所述第一驱动件包括第一驱动电机、第一固定座、第一驱动丝杆、第一丝杆螺母、第一轴承座以及第一联轴器,所述第一固定座设于所述基板上,所述第一驱动电机固定于所述第一固定座上,所述第一驱动电机的输出轴通过所述第一联轴器与所述第一驱动丝杆连接,所述第一驱动丝杆可转动的支撑于所述第一轴承座上,所述第一丝杆螺母螺纹配合于所述第一驱动丝杆上,所述第一滑座与所述第一丝杆螺母固定连接。
3.根据权利要求2所述的三轴机器人,其特征在于:所述第一固定座内设有第一容纳腔,所述第一容纳腔于所述第一固定座的第一侧侧壁上设有第一敞口,至少部分所述第一滑座经由所述第一敞口延伸进所述第一容纳腔内,所述第一容纳腔于所述第一固定座的第二侧侧壁上设有第一通过孔,所述第一轴承座穿设于所述第一通过孔内,所述第一驱动电机固定于所述第二侧侧壁的外壁面上。
4.根据权利要求2所述的三轴机器人,其特征在于:所述第二驱动件包括第二驱动电机、第二驱动丝杆、第二丝杆螺母、第二轴承座以及第二联轴器,所述第二驱动电机固定于所述第一滑座上,所述第二驱动电机的输出轴通过所述第二联轴器与所述第二驱动丝杆连接,所述第二驱动丝杆可转动的支撑于所述第二轴承座上,所述第二丝杆螺母螺纹配合于所述第二驱动丝杆上,所述第二滑座与所述第二丝杆螺母固定连接。
5.根据权利要求4所述的三轴机器人,其特征在于,所述第一滑座内设有第二容纳腔,所述第二驱动电机固定于所述第一滑座的顶部,所述第二驱动丝杆以及所述第二丝杆螺母均收容于所述第二容纳腔内,所述第二容纳腔的第一侧侧壁设有第二敞口,所述第二导向单元设于所述第二容纳腔的第一侧侧壁的外壁面上,所述第二丝杆螺母上设有连接块,所述连接块穿过所述第二敞口后与所述第三滑座连接,所述第二容纳腔的第二侧侧壁设有第二通过孔,所述第一丝杆螺母固定于所述第二通过孔内。
6.根据权利要求4所述的三轴机器人,其特征在于:所述第三驱动件包括设于所述第二滑座上的第三驱动电机、第三驱动丝杆、第三丝杆螺母、第三轴承座以及第三联轴器,所述第三驱动电机的输出轴通过所述第三联轴器与所述第三驱动丝杆连接,所述第三驱动丝杆可转动的支撑于所述第三轴承座上,所述第三丝杆螺母螺纹配合于所述第三驱动丝杆上,所述第三滑座直接或间接与所述第三丝杆螺母连接。
7.根据权利要求6所述的三轴机器人,其特征在于:所述第三驱动电机固定于所述第二滑座的顶部,所述第三驱动电机的输出轴沿所述第二方向延伸,所述第三丝杆螺母上固定有转接块,所述第二滑座上设有第四导向单元、所述第三滑座上设有第五导向单元,所述第四导向单元与所述第五导向单元分别与所述转接块连接,所述第四导向单元沿所述第二方向延伸,所述第五导向单元沿第四方向延伸,所述第四方向与所述第三方向形成预设夹角。
8.根据权利要求7所述的三轴机器人,其特征在于:所述第二滑座内设有第三容纳腔,所述第三驱动丝杆、所述第三丝杆螺母、所述转接块以及所述第四导向单元均收容于所述第三容纳腔内。
9.根据权利要求7所述的三轴机器人,其特征在于,所述第一导向单元、所述第二导向单元、所述第三导向单元、所述第四导向单元以及所述第五导向单元为交叉导轨副或直线导轨副。
10.根据权利要求1至9任一项所述的三轴机器人,其特征在于:所述第一滑座、所述第二滑座以及所述第三滑座的移动路径的起始端均设有回零开关;所述第一滑座、所述第二滑座以及所述第三滑座的移动路径的尾端均设有限位开关。
技术总结
本发明公开了一种三轴机器人,基板;第一导向单元,第一导向单元沿第一方向延伸;第一滑座;第一驱动件,以驱动第一滑座沿第一方向移动;第二导向单元,第二导向单元沿第二方向延伸;第二滑座;第二驱动件,以驱动第二滑座沿第二方向移动;第三导向单元,第三导向单元沿第三方向延伸,第一方向、第二方向与第三方向均两两垂直相交;第三滑座;第三驱动件,以驱动第三滑座沿第三方向移动。与现有技术相比,本发明的第一导向单元以及第一驱动件设于基板上、第二导向单元以及第二驱动件设于第一滑座上、第三导向单元以及第三驱动件设于第二滑座上,从而使得三轴机器人整体结构紧凑且刚性较高,空间占用较小。
技术研发人员:吴崇灯,朱学园
受保护的技术使用者:瑞声光电科技(常州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!