一种工业机器人多维度同时示教运动控制方法、工业机器人及存储介质与流程
本申请涉及工业机器人领域,尤其涉及一种工业机器人多维度同时示教运动控制方法、工业机器人及存储介质。
背景技术:
1、一般地,工业机器人示教时大都只能同时控制一个维度,如走关节时只能同时操控运动一个轴,走直线时只能同时操控运动x、y、z、a、b、c其中一个维度。如果示教点相对于相当点有多个维度的变化时,只允许单一维度的运动则无疑效率低下。
2、机器人本体轴作为一个整体,运动时统一规划,产生的数据同时下发到驱动器,以达到机器人各轴间协调的效果。而要想多个轴同时运动,则要求示教时多个按键必须同时按下,而这个条件是不可能达到的。因此,针对工业机器人的运动控制需要改进。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本申请提供了一种工业机器人多维度同时示教运动控制方法、工业机器人及存储介质。
2、第一方面,本申请提供了一种工业机器人多维度同时示教运动控制方法,所述方法包括步骤:
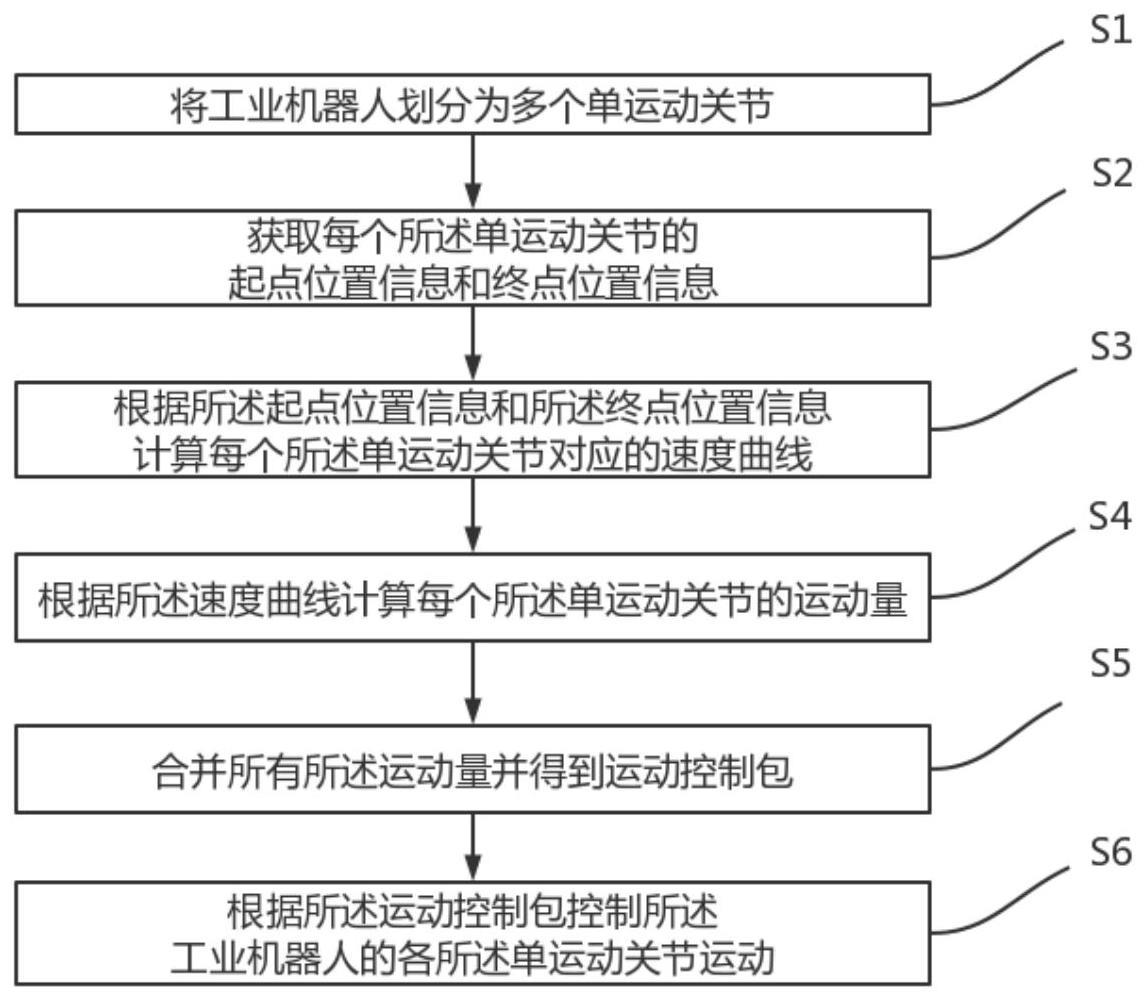
3、将工业机器人划分为多个单运动关节;
4、获取每个所述单运动关节的起点位置信息和终点位置信息;
5、根据所述起点位置信息和所述终点位置信息计算每个所述单运动关节对应的速度曲线;
6、根据所述速度曲线计算每个所述单运动关节的运动量;
7、合并所有所述运动量并得到运动控制包;
8、根据所述运动控制包控制所述工业机器人的各所述单运动关节运动。
9、优选地,所述将工业机器人划分为多个单运动关节包括步骤:
10、获取所述工业机器人的示教程序;
11、提取所述示教程序中的运动信息;
12、根据所述运动信息将所述工业机器人划分为多个单运动关节。
13、优选地,所述根据所述运动信息将所述工业机器人划分为多个单运动关节包括步骤:
14、根据所述运动信息提取所述工业机器人的运动部位;
15、在所述工业机器人上找到各所述运动部位对应的位置;
16、将各所述位置定义为单运动关节。
17、优选地,所述获取每个所述单运动关节的起点位置信息和终点位置信息包括步骤:
18、对每个所述单运动关节定义起点位置信息存储包和终点位置信息存储包;
19、获取每一所述单运动关节对应的终点位置信息;
20、获取所述工业机器人的第一当前关节值;
21、获取所述工业机器人刨除一个所述单运动关节外其他所有所述单运动关节的第二当前关节值;
22、将所述第一当前关节值存入所述起点位置信息存储包并作为所述起点位置信息;
23、将所述终点位置信息和所述第二当前关节值存入所述终点位置信息存储包并作为所述终点位置信息。
24、优选地,所述根据所述速度曲线计算每个所述单运动关节的运动量包括步骤:
25、获取每个所述单运动关节对应的所述速度曲线;
26、获取每个所述单运动关节对应的时间周期;
27、对所述速度曲线做所述时间周期的积分并得到所述运动量。
28、优选地,所述合并所有所述运动量并得到运动控制包包括步骤:
29、获取所述工业机器人划分所有所述单运动关节的划分顺序;
30、获取每个所述单运动关节对应的运动量;
31、将每个所述运动量按照所述划分顺序合并并得到所述运动控制包。
32、优选地,所述根据所述运动控制包控制所述工业机器人的各所述单运动关节运动包括步骤:
33、获取所述工业机器人划分所有所述单运动关节的划分顺序;
34、按照所述划分顺序将所述运动控制包中的各所述运动量分配给对应的所述单运动关节;
35、提取各所述运动量中对应的速度曲线和时间周期;
36、控制各所述单运动关节在对应的所述时间周期内按照对应的所述速度曲线运动。
37、第二方面,本申请提供了一种工业机器人,包括:
38、关节划分模块,用于将工业机器人划分为多个单运动关节;
39、位置信息获取模块,用于获取每个所述单运动关节的起点位置信息和终点位置信息;
40、速度曲线计算模块,用于根据所述起点位置信息和所述终点位置信息计算每个所述单运动关节对应的速度曲线;
41、运动量计算模块,用于根据所述速度曲线计算每个所述单运动关节的运动量;
42、运动控制包获取模块,用于合并所有所述运动量并得到运动控制包;
43、关节运动控制模块,用于根据所述运动控制包控制所述工业机器人的各所述单运动关节运动。
44、第三方面,提供了一种电子设备,所述电子设备包括:
45、至少一个处理器;以及,
46、与所述至少一个处理器通信连接的存储器;其中,
47、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行前述任一所述工业机器人多维度同时示教运动控制方法。
48、第四方面,提供了一种非暂态计算机可读存储介质,该非暂态计算机可读存储介质存储计算机指令,该计算机指令用于使该计算机执行前述任一所述工业机器人多维度同时示教运动控制方法。
49、本申请实施例提供的上述技术方案与现有技术相比具有如下优点:
50、本申请提供的一种工业机器人多维度同时示教运动控制方法、工业机器人及存储介质能够在示教时同时控制工业机器人的多轴维度运动,大大提升了工业机器人的示教效率。
技术特征:
1.一种工业机器人多维度同时示教运动控制方法,其特征在于,所述方法包括步骤:
2.根据权利要求1所述的工业机器人多维度同时示教运动控制方法,其特征在于,所述将工业机器人划分为多个单运动关节包括步骤:
3.根据权利要求2所述的工业机器人多维度同时示教运动控制方法,其特征在于,所述根据所述运动信息将所述工业机器人划分为多个单运动关节包括步骤:
4.根据权利要求1所述的工业机器人多维度同时示教运动控制方法,其特征在于,所述获取每个所述单运动关节的起点位置信息和终点位置信息包括步骤:
5.根据权利要求1所述的工业机器人多维度同时示教运动控制方法,其特征在于,所述根据所述速度曲线计算每个所述单运动关节的运动量包括步骤:
6.根据权利要求1所述的工业机器人多维度同时示教运动控制方法,其特征在于,所述合并所有所述运动量并得到运动控制包包括步骤:
7.根据权利要求1所述的工业机器人多维度同时示教运动控制方法,其特征在于,所述根据所述运动控制包控制所述工业机器人的各所述单运动关节运动包括步骤:
8.一种工业机器人,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种非暂态计算机可读存储介质,该非暂态计算机可读存储介质存储计算机指令,该计算机指令用于使该计算机执行前述任一权利要求1-7所述工业机器人多维度同时示教运动控制方法。
技术总结
本申请涉及一种工业机器人多维度同时示教运动控制方法、工业机器人及存储介质,所述方法包括步骤:将工业机器人划分为多个单运动关节;获取每个所述单运动关节的起点位置信息和终点位置信息;根据所述起点位置信息和所述终点位置信息计算每个所述单运动关节对应的速度曲线;根据所述速度曲线计算每个所述单运动关节的运动量;合并所有所述运动量并得到运动控制包;根据所述运动控制包控制所述工业机器人的各所述单运动关节运动。本申请提供的一种工业机器人多维度同时示教运动控制方法、工业机器人及存储介质能够在示教时同时控制工业机器人的多轴维度运动,大大提升了工业机器人的示教效率。
技术研发人员:黄贵良,魏中华
受保护的技术使用者:成都卡诺普机器人技术股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!