一种焊缝检测机器人定位装置的制作方法
1.本实用新型涉及定位装置技术领域,尤其是涉及一种焊缝检测机器人定位装置。
背景技术:
2.随着工业自动化水平的提高,机械手对工件上下料的应用越来越多,但是圆管件在弯管冲弧加工时,对焊缝有角度要求的情况下,在进料仓上加装焊缝检测定位机构可以方便对焊缝进行识别定位,便于机械手取走管件时确定焊缝方向。
3.现有申请号为cn201921252875.5的管件焊缝检测定位装置,包括管件储料平台、单管上料顶升组件、管件定位组件、管件焊缝位置检测组件,单管上料顶升组件顶板两端分别设有直线轴承,顶板下方设有第一电缸,顶板后部设有第一超声波传感器,第一超声波传感器通过控制器与第一电缸连接;管件定位组件旋转电机与第一定位销通过轴承连接,管件尾端定位组件包括第二电缸、第二定位销、滑块;本实用新型将提供另一种焊缝检测定位装置的结构。
技术实现要素:
4.本实用新型的目的在于提供一种焊缝检测机器人定位装置,实现自动化的焊缝定位,便于后续的加工处理。
5.为实现上述目的,本实用新型提供了如下技术方案:
6.一种焊缝检测机器人定位装置,包括机架,所述机架上设有传送链板,所述机架上设有用于驱动传送链板的第一电机,所述传送链板上均匀设有管件卡接机构,所述机架在传送链板上方设有安装架,所述安装架下方设有超声波传感器与焊缝检测传感器,所述机架两侧在安装架下方设有升降机构,所述升降机构顶部通过第二电机设有用于夹持管件端部的机械夹爪。
7.通过采用上述方案,首先将管件卡接入管件卡接机构内,之后第一电机驱动传送链板移动,带动管件移动,当管件靠近超声波传感器到预定距离时,通过控制器(单片机等)传输信号给第一电机,第一电机停止运行,传送链板停止,机械夹爪开始工作,夹持住管件两端,之后升降机构上升,将管件从管件卡接机构中脱出,之后第二电机带动管件旋转,通过焊缝检测传感器(具体型号可为罗兰snd40)检测管件焊缝所在位置,当检测到焊缝时,焊缝检测传感器通过控制器传递信号给升降机构,升降机构下降,将管件卡入管件卡接机构,完成固定,之后机械夹爪松开管件两端,第一电机继续工作,进行下一轮的管件焊缝检测定位工作;本实用新型实现了自动化的焊缝定位,便于后续的加工处理。
8.优选的,所述管件卡接机构包括设于传送链板两侧的固定座,所述固定座两侧铰接有卡接弧板,所述卡接弧板内壁与管件外壁相适应,所述卡接弧板外壁通过弹簧与固定座相连接。
9.优选的,所述卡接弧板内壁设有防滑垫。
10.优选的,所述升降机构为电动推杆。
11.优选的,第一电机与第二电机均为伺服电机。
12.本实用新型具有以下有益效果:
13.首先将管件卡接入管件卡接机构内,之后第一电机驱动传送链板移动,带动管件移动,当管件靠近超声波传感器到预定距离时,通过控制器(单片机等)传输信号给第一电机,第一电机停止运行,传送链板停止,机械夹爪开始工作,夹持住管件两端,之后升降机构上升,将管件从管件卡接机构中脱出,之后第二电机带动管件旋转,通过焊缝检测传感器(具体型号可为罗兰snd40)检测管件焊缝所在位置,当检测到焊缝时,焊缝检测传感器通过控制器传递信号给升降机构,升降机构下降,将管件卡入管件卡接机构,完成固定,之后机械夹爪松开管件两端,第一电机继续工作,进行下一轮的管件焊缝检测定位工作;本实用新型实现了自动化的焊缝定位,便于后续的加工处理。
附图说明
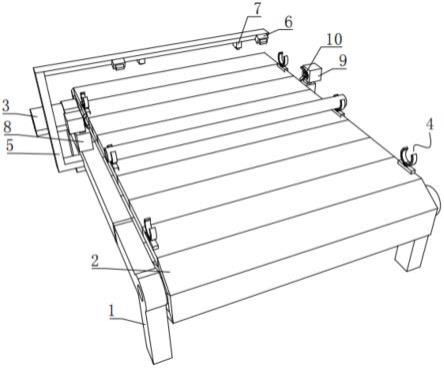
14.图1为本实用新型实施例的结构示意图;
15.图2为本实用新型实施例的管件卡接机构示意图。
16.图中:1、机架;2、传送链板;3、第一电机;4、管件卡接机构;41、固定座;42、卡接弧板;43、弹簧;44、防滑垫;5、安装架;6、超声波传感器;7、焊缝检测传感器;8、升降机构;9、第二电机;10、机械夹爪。
具体实施方式
17.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
18.一种焊缝检测机器人定位装置,如图1-2所示,包括机架1,机架1上设有传送链板2,机架1上设有用于驱动传送链板2的第一电机3,传送链板2上均匀设有管件卡接机构4,机架1在传送链板2上方设有安装架5,安装架5下方设有超声波传感器6与焊缝检测传感器7,机架1两侧在安装架5下方设有升降机构8,升降机构8顶部通过第二电机9设有用于夹持管件端部的机械夹爪10;
19.如图1-2所示,首先将管件卡接入管件卡接机构4内,之后第一电机3驱动传送链板2移动,带动管件移动,当管件靠近超声波传感器6到预定距离时,通过控制器(单片机等)传输信号给第一电机3,第一电机3停止运行,传送链板2停止,机械夹爪10开始工作,夹持住管件两端,之后升降机构8上升,将管件从管件卡接机构4中脱出,之后第二电机9带动管件旋转,通过焊缝检测传感器7(具体型号可为罗兰snd40)检测管件焊缝所在位置,当检测到焊缝时,焊缝检测传感器7通过控制器传递信号给升降机构8,升降机构8下降,将管件卡入管件卡接机构4,完成固定,之后机械夹爪10松开管件两端,第一电机3继续工作,进行下一轮的管件焊缝检测定位工作;本实用新型实现了自动化的焊缝定位,便于后续的加工处理。
20.如图1-2所示,管件卡接机构4包括设于传送链板2两侧的固定座41,固定座41两侧铰接有卡接弧板42,卡接弧板42内壁与管件外壁相适应,卡接弧板42外壁通过弹簧43与固定座41相连接,管件卡入两块卡接弧板42之间,弹簧43提供一定的固定力,实现自动定位焊缝位置的作用。
21.如图1-2所示,卡接弧板42内壁设有防滑垫44,减小管件移位的可能性,保障定位的准确性。
22.升降机构8为电动推杆,第一电机3与第二电机9均为伺服电机。
23.以上仅为本实用新型的具体实施例,但本实用新型的技术特征并不局限于此。任何以本实用新型为基础,为解决基本相同的技术问题,实现基本相同的技术效果,所作出的简单变化、等同替换或者修饰等,皆涵盖于本实用新型的保护范围内。
技术特征:
1.一种焊缝检测机器人定位装置,包括机架(1),其特征在于:所述机架(1)上设有传送链板(2),所述机架(1)上设有用于驱动传送链板(2)的第一电机(3),所述传送链板(2)上均匀设有管件卡接机构(4),所述机架(1)在传送链板(2)上方设有安装架(5),所述安装架(5)下方设有超声波传感器(6)与焊缝检测传感器(7),所述机架(1)两侧在安装架(5)下方设有升降机构(8),所述升降机构(8)顶部通过第二电机(9)设有用于夹持管件端部的机械夹爪(10)。2.根据权利要求1所述的一种焊缝检测机器人定位装置,其特征在于:所述管件卡接机构(4)包括设于传送链板(2)两侧的固定座(41),所述固定座(41)两侧铰接有卡接弧板(42),所述卡接弧板(42)内壁与管件外壁相适应,所述卡接弧板(42)外壁通过弹簧(43)与固定座(41)相连接。3.根据权利要求2所述的一种焊缝检测机器人定位装置,其特征在于:所述卡接弧板(42)内壁设有防滑垫(44)。4.根据权利要求1所述的一种焊缝检测机器人定位装置,其特征在于:所述升降机构(8)为电动推杆。5.根据权利要求1所述的一种焊缝检测机器人定位装置,其特征在于:第一电机(3)与第二电机(9)均为伺服电机。
技术总结
本实用新型公开了一种焊缝检测机器人定位装置,涉及定位装置技术领域,其技术要点:包括机架,机架上设有传送链板,机架上设有用于驱动传送链板的第一电机,传送链板上均匀设有管件卡接机构,机架在传送链板上方设有安装架,安装架下方设有超声波传感器与焊缝检测传感器,机架两侧在安装架下方设有升降机构,升降机构顶部通过第二电机设有用于夹持管件端部的机械夹爪;本实用新型实现了自动化的焊缝定位,便于后续的加工处理。便于后续的加工处理。便于后续的加工处理。
技术研发人员:李龙
受保护的技术使用者:江苏镭视智能装备有限公司
技术研发日:2022.02.10
技术公布日:2022/9/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1