一种可快速安拆夹具的上下料机器人的制作方法
1.本实用新型属于送料器械技术领域,具体涉及一种可快速安拆夹具的上下料机器人。
背景技术:
2.上下料机械手主要实现机床制造过程的完全自动化,并采用了集成加工技术,适用于生产线的上下料、工件翻转、工件转序等。
3.针对于小型零件的夹持上下料时时,为了保证夹持防脱稳定性,需要在更变零件后将其夹具适配进行更换组装,现有螺接安装方式虽然保证的稳定性,但是受众于零件规格批次更变频繁的加工作业时,其安拆流程较为复杂,使操作便捷性受到影响。
技术实现要素:
4.本实用新型提供了一种可快速安拆夹具的上下料机器人,具有便于安拆夹具的特点。
5.本实用新型提供如下技术方案:一种可快速安拆夹具的上下料机器人,包括机器人本体、连接座和夹爪本体,所述连接座和所述夹爪本体之间通过连接组件卡合连接,所述连接组件包括固定卡凸、嵌设卡座、和两个防脱限位销,所述嵌设卡座与所述固定卡凸卡合连接,所述防脱限位销滑动连接于所述固定卡凸的内侧,且所述防脱限位销的一端贯穿所述嵌设卡座,所述连接座与所述连接组件之间设有锁紧组件。
6.其中,所述固定卡凸与所述夹爪本体固定连接,所述嵌设卡座与所述连接座固定连接,两个所述防脱限位销之间固定连接有第一压簧。
7.其中,所述锁紧组件包括滑插座、锁止座和锁止插板,所述锁止插板贯穿所述滑插座且与所述滑插座滑动连接,所述锁止插板的一端卡合连接于所述锁止座的内侧。
8.其中,所述锁止插板位于所述锁止座内侧的一端滑动连接有阻隔销,所述阻隔销与所述锁止插板的内壁之间固定连接有第二压簧。
9.其中,所述阻隔销的一端贯穿所述锁止座且与所述锁止座滑动连接。
10.其中,所述滑插座与所述连接座固定连接,所述锁止座与所述固定卡凸固定连接。
11.本实用新型的有益效果是:将夹爪本体更换安装时,通过固定卡凸和嵌设卡座之间的相互卡合实现初步卡合,通过防脱限位销从固定卡凸内侧滑动脱出贯穿嵌设卡座实现定位,之后通过锁止插板贯穿滑插座并且头端卡接于锁止座的内侧后,使阻隔销实现对锁止插板的辅助锁止,起到辅助增加固定卡凸和嵌设卡座之间卡合牢靠性作用的同时,也通过锁止插板对防脱限位销防接触阻隔,避免外部工具接触造成嵌设卡座和固定卡凸之间滑脱,从而保证安装稳定性的同时,相较于现有安装操作更为简单,便于更换夹爪本体时的快速安拆。
12.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
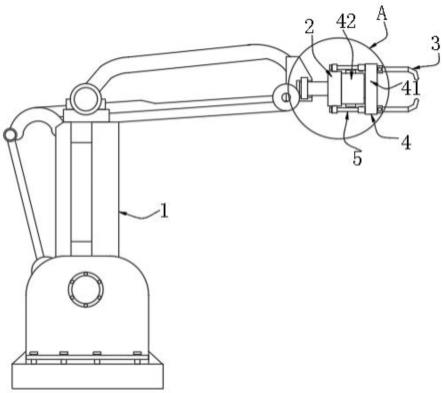
13.图1为本实用新型的结构示意图;
14.图2为图1中a部的放大图;
15.图3为本实用新型的局部剖视图;
16.图4为图3中b部的放大图。
17.图中:1、机器人本体;2、连接座;3、夹爪本体;4、连接组件;41、固定卡凸;42、嵌设卡座;43、防脱限位销;431、第一压簧;5、锁紧组件;51、滑插座;52、锁止座;53、锁止插板;531、阻隔销;532、第二压簧。
具体实施方式
18.请参阅图1-图4,本实用新型提供以下技术方案:一种可快速安拆夹具的上下料机器人,包括机器人本体1、连接座2和夹爪本体3,连接座2和夹爪本体3之间通过连接组件4卡合连接,连接组件4包括固定卡凸41、嵌设卡座42、和两个防脱限位销43,嵌设卡座42与固定卡凸41卡合连接,防脱限位销43滑动连接于固定卡凸41的内侧,且防脱限位销43的一端贯穿嵌设卡座42,连接座2与连接组件4之间设有锁紧组件5。
19.本实施方案中:机器人本体1的传动端与连接座2固定安装(此为现有技术其传动原理在此不做赘述),在对夹爪本体3更换安装时,通过固定卡凸41和嵌设卡座42之间的相互卡合之后,通过防脱限位销43对固定卡凸41和嵌设卡座42之间实现定位,使连接座2和夹爪本体3之间初步稳定,之后通过锁止插板53贯穿滑插座51并且头端卡接于锁止座52的内侧后,起到辅助增加固定卡凸41和嵌设卡座42之间卡合牢靠性作用的同时,也通过锁止插板53对防脱限位销43防接触阻隔,避免外部工具接触造成嵌设卡座42和固定卡凸41之间滑脱,从而保证安装稳定性的同时,相较于现有安装操作更为简单。
20.固定卡凸41与夹爪本体3固定连接,嵌设卡座42与连接座2固定连接,两个防脱限位销43之间固定连接有第一压簧431;固定卡凸41和嵌设卡座42相互嵌设后实现连接座2和夹爪本体3之间的初步限位,之后通过第一压簧431的复位推动使防脱限位销43贯穿嵌设卡座42实现固定卡凸41和嵌设卡座42之间的快速定位,方便于安装状态时的初步定位,使后续安装操作时无需手部托扶夹爪本体3支撑,提高后续安装操作的便捷性。
21.锁紧组件5包括滑插座51、锁止座52和锁止插板53,锁止插板53贯穿滑插座51且与滑插座51滑动连接,锁止插板53的一端卡合连接于锁止座52的内侧;在锁止插板53插入滑插座51卡接于锁止座52内侧后,由于锁止插板53分别位于两个防脱限位销43的外侧对防脱限位销43起到阻隔作用,避免外部物品直接与防脱限位销43接触造成固定卡凸41和嵌设卡座42的滑脱,从而保证安装稳定性。
22.锁止插板53位于锁止座52内侧的一端滑动连接有阻隔销531,阻隔销531与锁止插板53的内壁之间固定连接有第二压簧532,阻隔销531的一端贯穿锁止座52且与锁止座52滑动连接,滑插座51与连接座2固定连接,锁止座52与固定卡凸41固定连接;通过滑插座51起到对锁止插板53的滑动路径限位作用,提高锁止插板53向锁止座52内侧插入时的对位稳定性,在滑插座51的头端进入锁止座52后,通过第二压簧532的复位推动阻隔销531从锁止插板53中穿出与锁止座52之间卡接,此时通过锁止插板53的连锁作用提高嵌设卡座42和固定卡凸41之间的卡合稳固性。
23.本实用新型的工作原理及使用流程:将夹爪本体3更换安装时,首先将阻隔销531向锁止座52的内侧推入,之后将锁止插板53从锁止座52以及滑插座51的内侧滑动实现分离抽出,从而解除锁止插板53对防脱限位销43的阻隔限位,之后可通过将防脱限位销43向嵌设卡座42的内侧推入后,将夹爪本体3抽拉使固定卡凸41和嵌设卡座42之间分离实现对夹爪本体3的拆卸,之后将新的夹爪本体3通过固定卡凸41和嵌设卡座42之间的相互卡合实现初步卡合,操作时首先将防脱限位销43向固定卡凸41的内侧按压收入使第一压簧431受到压力收缩,之后推动夹爪本体3将固定卡凸41向嵌设卡座42的内侧卡合,通过第一压簧431的复位使防脱限位销43从固定卡凸41内侧滑动脱出贯穿嵌设卡座42实现定位,使连接座2和夹爪本体3之间初步稳定,此时通过锁止插板53贯穿滑插座51并且头端卡接于锁止座52的内侧后,通过第二压簧532的复位推动阻隔销531实现对锁止插板53的辅助锁止,起到辅助增加固定卡凸41和嵌设卡座42之间卡合牢靠性作用的同时,也通过锁止插板53对防脱限位销43防接触阻隔,避免外部工具接触造成嵌设卡座42和固定卡凸41之间滑脱,从而保证安装稳定性的同时,相较于现有安装操作更为简单,便于更换夹爪本体3时的快速安拆。
技术特征:
1.一种可快速安拆夹具的上下料机器人,包括机器人本体(1)、连接座(2)和夹爪本体(3),其特征在于:所述连接座(2)和所述夹爪本体(3)之间通过连接组件(4)卡合连接,所述连接组件(4)包括固定卡凸(41)、嵌设卡座(42)、和两个防脱限位销(43),所述嵌设卡座(42)与所述固定卡凸(41)卡合连接,所述防脱限位销(43)滑动连接于所述固定卡凸(41)的内侧,且所述防脱限位销(43)的一端贯穿所述嵌设卡座(42),所述连接座(2)与所述连接组件(4)之间设有锁紧组件(5)。2.根据权利要求1所述的一种可快速安拆夹具的上下料机器人,其特征在于:所述固定卡凸(41)与所述夹爪本体(3)固定连接,所述嵌设卡座(42)与所述连接座(2)固定连接,两个所述防脱限位销(43)之间固定连接有第一压簧(431)。3.根据权利要求1所述的一种可快速安拆夹具的上下料机器人,其特征在于:所述锁紧组件(5)包括滑插座(51)、锁止座(52)和锁止插板(53),所述锁止插板(53)贯穿所述滑插座(51)且与所述滑插座(51)滑动连接,所述锁止插板(53)的一端卡合连接于所述锁止座(52)的内侧。4.根据权利要求3所述的一种可快速安拆夹具的上下料机器人,其特征在于:所述锁止插板(53)位于所述锁止座(52)内侧的一端滑动连接有阻隔销(531),所述阻隔销(531)与所述锁止插板(53)的内壁之间固定连接有第二压簧(532)。5.根据权利要求4所述的一种可快速安拆夹具的上下料机器人,其特征在于:所述阻隔销(531)的一端贯穿所述锁止座(52)且与所述锁止座(52)滑动连接。6.根据权利要求3所述的一种可快速安拆夹具的上下料机器人,其特征在于:所述滑插座(51)与所述连接座(2)固定连接,所述锁止座(52)与所述固定卡凸(41)固定连接。
技术总结
本实用新型属于送料器械技术领域,尤其为一种可快速安拆夹具的上下料机器人,包括机器人本体、连接座和夹爪本体,所述连接座和所述夹爪本体之间通过连接组件卡合连接;将夹爪本体更换安装时,通过固定卡凸和嵌设卡座之间的相互卡合实现初步卡合,通过防脱限位销从固定卡凸内侧滑动脱出贯穿嵌设卡座实现定位,之后通过锁止插板贯穿滑插座并且头端卡接于锁止座的内侧后,使阻隔销实现对锁止插板的辅助锁止,起到辅助增加固定卡凸和嵌设卡座之间卡合牢靠性作用的同时,也通过锁止插板对防脱限位销防接触阻隔,避免外部工具接触造成嵌设卡座和固定卡凸之间滑脱,从而保证安装稳定性的同时,相较于现有安装操作更为简单。相较于现有安装操作更为简单。相较于现有安装操作更为简单。
技术研发人员:李延品
受保护的技术使用者:青岛升浩达智能装备有限公司
技术研发日:2022.03.08
技术公布日:2022/7/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1