一种三轴机械臂装置
1.本实用新型涉及机械臂技术领域,尤其涉及一种三轴机械臂装置。
背景技术:
2.一般地,三轴机械臂主要应用在流水线生产中,其作用是把设置于其执行端的工具进行x轴、y轴以及z轴方向的位移,使工具能够对流水线上的工件进行加工。
3.但由于应用场地和功能不同,安装方式和结构也各不相同。如何将三轴机械臂应用于车辆,从而进行车载三轴机械臂专项作业,实现精准地抓取目标物体,并自动将其送到指定位置,是需要研究的课题。
技术实现要素:
4.为了解决上述技术问题,本实用新型提供一种三轴机械臂装置。
5.为了达到以上目的,本实用新型采取以下技术方案:
6.一种三轴机械臂装置,包括一组竖向导轨固定于车架主体,所述竖向导轨与竖向活动架可滑动连接,所述竖向活动架下方还连接推杆电机的输出端;所述竖向活动架内侧还设置有纵向导轨,所述纵向导轨与纵向活动架可滑动连接,所述纵向活动架连接有纵向螺母块,所述纵向螺母块与纵向丝杠配合连接,所述纵向丝杠与纵向驱动电机的输出端连接,所述纵向驱动电机固定在竖向活动架上;所述纵向活动架上固定有横向驱动电机,所述横向驱动电机的输出端连接横向丝杠,所述横向丝杠与横向螺母块配合连接,所述横向螺母块与机械臂连接。
7.进一步地,所述竖向活动架下方设置摄像头与距离传感器。
8.进一步地,所述竖向活动架下方设置两个摄像头与一个距离传感器,所述距离传感器设置在两个摄像头的中间位置。
9.进一步地,所述纵向活动架下方设置有一组滑套,所述滑套配合于一组支撑光轴之上,所述支撑光轴两端与竖向活动架连接。
10.进一步地,所述横向丝杠与纵向丝杠端部均通过其对应的轴承座固定安装;所述横向驱动电机和纵向驱动电机为伺服电机。
11.有益效果:本实用新型通过机器视觉同时配合距离变化的量值辅助机械臂对目标位置判定,并自动将机械臂送到指定位置;结构简单,成本低廉,运行稳定。
附图说明
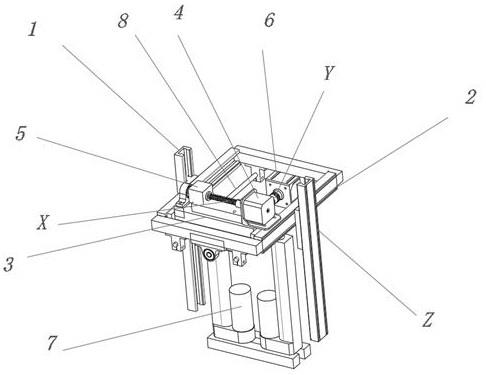
12.图1为本实用新型的整体结构示意图;
13.图中,竖向导轨1,竖向活动架2,纵向活动架3,横向驱动电机4,横向螺母块5,纵向驱动电机6,推杆电机7,支撑光轴8,x轴x,y轴y,z轴z。
具体实施方式
14.下面结合具体实施例和附图对本实用新型作进一步说明。
15.图1出示了一种三轴机械臂装置,包括一组竖向导轨1固定于车架主体,所述竖向导轨1与竖向活动架2可滑动连接,所述竖向活动架2下方还连接推杆电机7的输出端;所述竖向活动架2内侧还设置有纵向导轨,所述纵向导轨与纵向活动架3可滑动连接,所述纵向活动架3底部连接有纵向螺母块,所述纵向螺母块与纵向丝杠配合连接,所述纵向丝杠与纵向驱动电机6的输出端连接,所述纵向驱动电机6固定在竖向活动架2上;所述纵向活动架3上固定有横向驱动电机4,所述横向驱动电机4的输出端连接横向丝杠,所述横向丝杠与横向螺母块5配合连接,所述横向螺母块5与机械臂连接。
16.所述竖向活动架2下方设置摄像头与距离传感器。
17.所述竖向活动架2下方设置两个摄像头与一个距离传感器,所述距离传感器设置在两个摄像头的中间位置。
18.所述纵向活动架3下方设置有一组滑套,所述滑套配合于一组支撑光轴8之上,所述支撑光轴8两端与竖向活动架2连接。
19.所述横向丝杠与纵向丝杠端部均通过其对应的轴承座固定安装;所述横向驱动电机4和纵向驱动电机6为伺服电机。
20.本实用新型中三轴,即x轴x,y轴y,z轴z;通过机器视觉同时配合距离变化的量值辅助机械臂对目标位置判定,并自动将机械臂送到指定位置;结构简单,成本低廉,运行稳定。
21.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
技术特征:
1.一种三轴机械臂装置,其特征在于,包括一组竖向导轨固定于车架主体,所述竖向导轨与竖向活动架可滑动连接,所述竖向活动架下方还连接推杆电机的输出端;所述竖向活动架内侧还设置有纵向导轨,所述纵向导轨与纵向活动架可滑动连接,所述纵向活动架连接有纵向螺母块,所述纵向螺母块与纵向丝杠配合连接,所述纵向丝杠与纵向驱动电机的输出端连接,所述纵向驱动电机固定在竖向活动架上;所述纵向活动架上固定有横向驱动电机,所述横向驱动电机的输出端连接横向丝杠,所述横向丝杠与横向螺母块配合连接,所述横向螺母块与机械臂连接。2.如权利要求1所述三轴机械臂装置,其特征在于,所述竖向活动架下方设置摄像头与距离传感器。3.如权利要求1所述三轴机械臂装置,其特征在于,所述竖向活动架下方设置两个摄像头与一个距离传感器,所述距离传感器设置在两个摄像头的中间位置。4.如权利要求1所述三轴机械臂装置,其特征在于,所述纵向活动架下方设置有一组滑套,所述滑套配合于一组支撑光轴之上,所述支撑光轴两端与竖向活动架连接。5.如权利要求1所述三轴机械臂装置,其特征在于,所述横向丝杠与纵向丝杠端部均通过其对应的轴承座固定安装;所述横向驱动电机和纵向驱动电机为伺服电机。
技术总结
本实用新型涉及一种三轴机械臂装置,包括一组竖向导轨固定于车架主体,所述竖向导轨与竖向活动架可滑动连接,所述竖向活动架下方还连接推杆电机的输出端;所述竖向活动架内侧与纵向活动架可滑动连接,所述纵向活动架底部与纵向丝杠配合连接,所述纵向丝杠与纵向驱动电机的输出端连接,所述纵向驱动电机固定在竖向活动架上;所述纵向活动架上固定有横向驱动电机,所述横向驱动电机的输出端连接横向丝杠,所述横向丝杠与横向螺母块配合连接,所述横向螺母块与机械臂连接。本实用新型通过机器视觉同时配合距离变化的量值辅助机械臂对目标位置判定,并自动将机械臂送到指定位置;结构简单,成本低廉,运行稳定。运行稳定。运行稳定。
技术研发人员:刘岩 张士明 孙珺显 戴维
受保护的技术使用者:山东职业学院
技术研发日:2022.03.14
技术公布日:2022/4/20
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1